这是一个方法最简单,入门最快速的机器人制造教程。
这里面说到的东西都非常简单,看过这些教程以后,你可以在几个小时内制造出一个机器人。何乐而不为呢?
由于有很多细小的东西 ...
利用不到一周的时间,制作的一款视觉跟踪,寻找稳定的工作
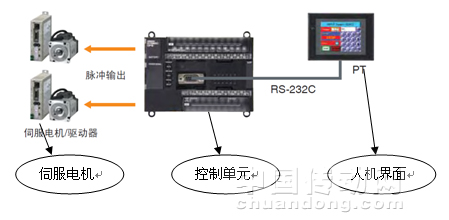
长治清华汇信分公司 蔡森华 来源《伺服与运动控制》第5期 供稿
随着工业自动化的普及和发展,焊接变位机的应用也逐渐普及,主要是在汽车,电子,机械等领域的焊接,焊接变位机结合焊接机器人 ...
作者:
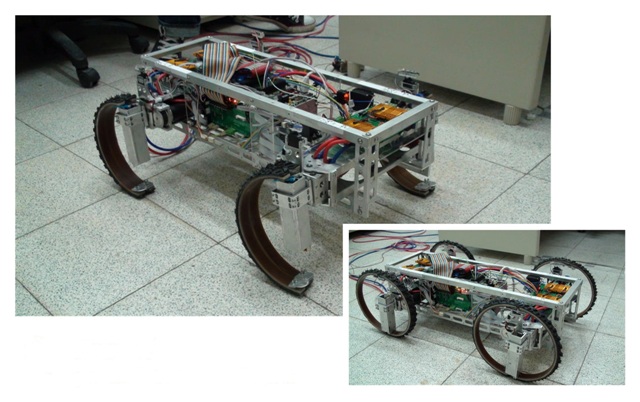
Pei-Chun Lin - Department of Mechanical Engineering, National Taiwan University
Shen-Chiang Chen - Department of Mechanical Engineering, National Taiwan University
Ke Jung ...
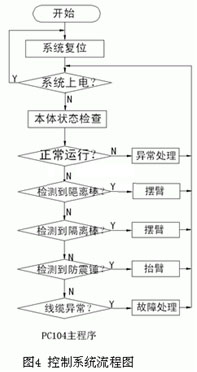
作者:吴俊飞 吴爽 姜生元 王新智
1.引言
高压输电线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换 ...
近二十年来,机器人在工业生产中得到了越来越广泛的应用,并逐步进入人们的日常生活。机器人朝着智能化、小型化、数字化方向发展。所谓智能化,直观地说就是具有适应外部环境变化的能力。计算机 ...
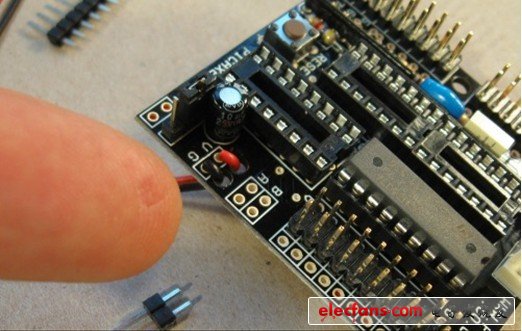
导读: 我在实际制作了NE555寻光机器人以后,对GrantM设计的这部由单施密特触发器作为主控核心的机器人也有了更深一层的体会,有了制作一个系列低技术寻光机器人的想法。本文将给读者介绍我制作 ...
目前,市场上虽然出现了一些爬壁机器人,但至今还没有一种专门针对玻窗清洁的机器人。本文介绍了一种基于负压吸附的轮式玻窗清洁机器人,将其用于高层住宅的的玻璃清洗工作。使用该机器人可以避 ...
用视觉让你的机器手智能化。
Yoguai提供视觉定位机器手,提供机器手视觉控制器
近二十年来,机器人在工业生产中得到了越来越广泛的应用,并逐步进入人们的日常生活。机器人朝着智能化 ...
在众多制造业领域中,应用工业机器人最广泛的领域是汽车及汽车零部件制造业。2005年美洲地区汽车及汽车零部件制造业对工业机器人的需求占该地区所有行业对工业机器人需求的比例高达61%(见图1); ...
由桂林电子科技大学信息科技学院的学生带来的基于PIC32的六足仿生机器人设计作品,性能如何?大家来检验看看~~
引 言
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结 ...