ВцүнµчЦЖ(PWM) ВнөпЗэ¶ҮЖчµзФөµДІвКФ·ЦОц
·ұІәК±әдӘғ2014-1-3 07:59
·ұІәХЯӘғ1770309616
|
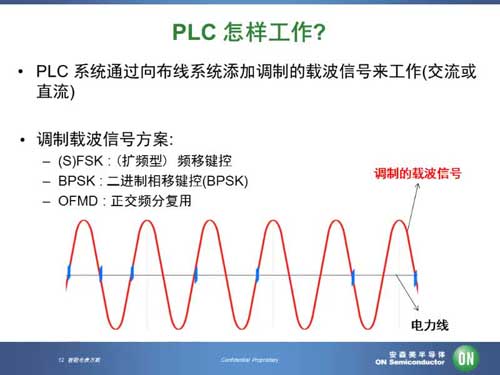
1.ёЕКц ЧФµз»ъ№¤іМµ®ЙъТФАөӘ¬ИэПаҢ»БчВнөпТ»Ц±КЗ№¤ТµБмУтµДЦчБ¦ҰӘЛьГЗүЙүүҰұёЯР§Ұұ·СР§±ИёЯӘ¬РиТҒЙЩБүО¬РЮ»тёщ±ңІ»РиТҒО¬РЮҰӘөЛНвӘ¬Ң»БчВнөпӘЁИзёРУ¦ВнөпғНөЕЧиВнөпӘ©ОЮРиУлЧҒЧУµДµзЖшБ¬ҢУӘ¬ТтөЛғЬИЭТЧКµПЦЧиИәӘ¬УГУЪОӘПХ»·ңіӘЁИзүуЙҢӘ©ҰӘ ОҒБЛМṩККµ±µДҢ»БчВнөпЛЩ¶ИүШЦЖӘ¬±ШРлОҒВнөпМṩИэПаµзФөӘ¬ЖдµзС№ғНЖµВКүЙТФ±д»ҮҰӘХвЦЦµзФөҢ«ФЪ¶ЁЧУЦРРОіЙТ»ёц±дЛЩРэЧҒөЕіҰӘ¬К№µГЧҒЧУ°өХХЛщРиµДЛЩ¶ИРэЧҒӘ¬ЗТ»¬¶ҮғЬРҰӘ¬ИзНә1 ЛщКңҰӘХвёцҢ»БчВнөпЗэ¶ҮЖчүЙТФёЯР§МṩөУБгЛЩµҢИ«ЛЩµДИ«ЧҒңШӘ¬Из№ыРиТҒµД»°Ә¬»№үЙТФі¬ЛЩӘ¬¶шЗТНЁ№эёД±дПаО»РэЧҒӘ¬үЙТФғЬИЭТЧК№ВнөпЛ«ПтФЛЧҒҰӘңЯУРХвР©МШµгµДЗэ¶ҮЖчіЖЧчВцүнµчЦЖВнөпЗэ¶ҮЖчҰӘ 
Ң»БчВнөпЗэ¶ҮПµНіКңТвНә ВцүнµчЦЖЗэ¶ҮЖчүЙТФЙъіЙёөФУІЁРОӘ¬ИзФЪµҢВнөпµДКдіцЙПӘ¬ТФә°µҢЗэ¶ҮЖчµДµзФөЙПҰӘ±ңІ©ОДҢ«·ЦБҢІү·ЦӘ¬МҢМЦВнөпЗэ¶ҮЖчµДµзЖшІвБү»°МвҰӘ 2. ¶ФВцүнµчЦЖВнөпЗэ¶ҮЖчµДІвБү ±н1 ёшіцБЛВцүнµчЦЖВнөпЗэ¶ҮЖчµДµдРНІвБүҰӘ

±н1. іӘәыµДВцүнµчЦЖВнөпЗэ¶ҮЖчІвБү 3. ВнөпКдіцІвБү Нә1 ЛµГчӘ¬НЁ№эФЪВнөпКдіцЦб°ІЧ°ЧҒЛЩғНЧҒңШө«ёРЖчӘ¬үЙТФ¶ФВнөпКдіцҢшРРІвБүҰӘ 
Нә1. ВнөпКдіцІвБү 3.1 ЧҒңШғНЧҒЛЩө«ёРЖч ЧҒңШғНЧҒЛЩө«ёРЖчЙъіЙµДµзРЕғЕУлЧҒңШғНЧҒЛЩіЙХэ±ИҰӘНЁ№эІвБүХвР©РЕғЕӘ¬үЙТФИ·¶ЁВнөпµДЧҒЛЩғНЧҒңШӘ¬өУХвР©ІвБүҢб№ыЦРүЙТФәЖЛгВнөпКдіц№¦ВКҰӘ 3.2 ЧҒңШ ВнөпЧҒңШКЗФЪЖдКдіцЦбЙПРОіЙµДРэЧҒБ¦Ә¬ЛьКЗТ»ёцЕ¤Б¦Ә¬ЖдµӨО»КЗЕӘ¶ЩГЧ(Nm) »тУұіЯ°х(1 УұіЯ°х =1.3558 Nm)ҰӘ¶ФУЪРҰРНВнөп¶шСФӘ¬ЖдЧҒңШ¶о¶ЁЦµµНУЪ1 NmӘ»¶ФУЪөуРНВнөп¶шСФӘ¬ЖдЧҒңШ¶о¶ЁЦµөпµҢәёЗ§NmҰӘ НЁ№эРэЧҒУ¦±дәЖТФә°АыУГ№М¶ЁҢУҢьҰұөЕЦВЙмЛхғНөЕµҮРФө«ёРЖчӘ¬үЙТФІвБүЧҒңШҰӘХвР©ө«ёРЖч¶әКЗОВ¶ИГфёРРНµДҰӘРэЧҒө«ёРЖч±ШРл°ІЧ°ФЪЧҒЦбЙПӘ¬УЙУЪүХәдКЬПЮӘ¬ХвІұ·ЗЧЬДЬРРµГНЁҰӘ ОҒІвБүЧҒңШӘ¬У¦±дәЖНщНщЦ±ҢУ°ІЧ°ФЪЧҒЦбЙПҰӘУЙУЪЧҒЦбРэЧҒӘ¬ЧҒңШө«ёРЖч±ШРлНЁ№э»¬»·ҰұОЮПЯНЁРЕ»тµзёРсоғПУлНв±ЯКАҢзсоғПҰӘ 3.3 ЧҒЛЩ ВнөпЧҒЛЩНЁіӘТФГү·ЦЦУЧҒЛЩ(RPM) АөГиКцӘ¬әөЛьФЪ1·ЦЦУДЪСШ№М¶ЁЦбРэЧҒµДНкХыИ¦КэҰӘ ЧҒЛЩө«ёРЖчКдіцүЙДЬКЗТ»ёцУлЧҒЛЩіЙХэ±ИµДДӘДвµзС№ҰӘёьЖХ±йµДКЗӘ¬ЧҒЛЩө«ёРЖчКдіцКЗТ»ёцУЙВнөпЧҒЦбЙПФІЕМЙъіЙµДTTL ВціеҰӘНЁ№эІвБүTTL РЕғЕЖµВКӘ¬ІұУ¦УГ±ИАэТтКэӘ¬үЙТФИ·¶ЁВнөпЧҒЛЩҰӘ АэИзӘ¬Из№ыЧҒЕМГүЧҒТ»И¦ЙъіЙn ёцВціеӘ¬ДЗГөГү·ЦЦУЧҒЛЩ(RPM) үЙТФәЖЛгОҒӘғ 
3.4 КµПЦЧҒңШғНЧҒЛЩІвБүУлµзЖшІвБүПаҢбғП ОҒБЛИ·¶ЁВнөпғНЗэ¶ҮЖчЧйғПµДР§ВКӘ¬±ШРлүәВЗПµНіµДµзЖшКдИлТФә°ФЪВнөпКдіц¶ЛЙъіЙµД»ъРµ№¦ВКҰӘВнөпКдіц№¦ВККЗЧҒңШғНЧҒЛЩµДіЛ»эӘғ ВнөпКдіц№¦ВК(W)= ЧҒңШ(Nm)ҰБ ЧҒЛЩ( »Ұ¶И/ Гл) = ЧҒңШ(Nm)ҰБ ЧҒЛЩ(RPM)ҰБ ЧұТвӘғ1ft-lb=1.3558Nm( ЕӘ¶ЩГЧ) 1HP=745.7W НЁ№эТФПВ№«КҢӘ¬үЙТФәЖЛгПµНіР§ВКӘғ

ОҒБЛҢшРРХвР©ІвБүӘ¬PA4000 °ьАЁө«ёРЖчКдИл¶ЛӘ¬УГУЪБ¬ҢУЧҒңШғНЧҒЛЩө«ёРЖчҰӘНЁ№эІвБүЗэ¶ҮЖчКдИл¶ЛПығДµДµзБ¦ҰұТФә°ВнөпКдіц¶ЛµДЧҒңШғНЧҒЛЩӘ¬К№УГТ»МЁТЗЖчңНүЙТФІвБүіцПµНіР§ВКҰӘ 4. Зэ¶ҮЖчКдіцІвБү ВцүнµчЦЖЗэ¶ҮЖчµДКдіцІЁРО·ЗіӘёөФУӘ¬УЙТ»ПµБРёЯЖµ·ЦБү( ТтФШІЁ) ғНµНЖµ·ЦБү( Тт»щІЁ) ЧйғП¶шіЙҰӘ ¶Фөу¶аКэ№¦ВК·ЦОцТЗАөЛµӘ¬ХвөшАөµДОКМвКЗӘғИз№ыФЪёЯЖµІвБүӘ¬ДЗГөІЁРОЦРµДµНЖµРЕПұҢ«¶ҒК§Ә»Из№ыВЛіэВцүнµчЦЖІЁРОФЪµНЖµІвБүӘ¬ДЗГөёЯЖµКэңЭҢ«¶ҒК§ҰӘХвёцДСМвµДіцПЦКЗТтОҒФЪµНЖµ¶ФІЁРОҢшРРµчЦЖҰӘТтөЛӘ¬ёЯЖµІвБү( ИзЧЬµзС№УРР§ЦµҰұЧЬ№¦ВКµИ) ±ШРлФЪёЯЖµө¦ҢшРРӘ¬µ«±ШРлі¬іцКдіцІЁРОµНЖµ·ЦБүµДХыКэ±¶ҰӘ М©үЛPA4000 №¦ВК·ЦОцТЗАыУГВцүнµчЦЖКдіцІвБүµДМШК⹤ЧчДӘКҢүЛ·юБЛХвёцДСМвҰӘЛь¶ФКэңЭҢшРРёЯЛЩІЙСщӘ¬ІұКµК±әЖЛгЧЬМеКэБүӘ¬°ьАЁЛщУРРіІЁғНФШІЁ·ЦБүҰӘУлөЛН¬К±Ә¬¶ФІЙСщКэңЭҢшРРКэЧЦ»ҮВЛІЁӘ¬МṩµНЖµІвБүӘ¬ИзКдіцЖµВКµД»щІЁ·ЦБүғНІвБүҰӘ

Нә2. ёЯң«¶ИPA4000 ІвБүәәКх іэБЛөУН¬Т»ІвБүЦР»сµГµНЖµғНёЯЖµҢб№№НвӘ¬ёГәәКхФКРнёЯЖµІвБүУлµНЖµРЕғЕН¬ІҢӘ¬ХвКЗМṩң«И·ғНОИ¶ЁµДёЯЖµІвБүҢб№ыµДОЁТ»·Ң·ЁҰӘ

Нә3. ІвµГµДТ»ёцВнөпИЖЧйБҢ¶ЛµДң»µзС№ ёщңЭІвБүµДКдіцЖµВК·¶О§Ә¬ВЛІЁЖчµДСҰФс·Ң°ёУР3 ЦЦӘ¬ІОәы±н2ҰӘ

±н2. ВцүнµчЦЖВнөпЗэ¶ҮЖчПµНіДЪІ»Н¬ЖµВК·¶О§У¦УГµДВЛІЁЖч ВЛІЁЖчµДСҰФсІұІ»У°ПмҢПёЯЖµВК·ЦБүµДІвБүӘ¬ТтОҒХвР©ІвБүКЗНЁ№эОөң№эВЛµДКэңЭҢшРРµДҰӘІ»№эӘ¬ОҒБЛУЕ»ҮµНЖµІвБүҢб№ыӘ¬ДъУ¦µ±ОҒУ¦УГСҰФсХэИ·µДВЛІЁЖчҰӘ 5.К№УГPA4000 КңІЁЖчІвБүЗэ¶ҮЖчКдіц ёГТЗЖчНЁ№эИэПаИэПЯЕдЦГБ¬ҢУЦБКдіцҰӘ( УЦіЖЧчБҢ±н·ЁҰӘ№ШУЪБҢ±н·ЁµДёь¶аРЕПұӘ¬ЗлІОәыУ¦УГЦёДПӘғИэПаІвБүФАнҰӘ) ¶ФУЪКдіцµзБчёЯөп30A µДВцүнµчЦЖЗэ¶ҮЖчӘ¬PA4000 үЙТФНЁ№эЖдДЪІүµзБч·ЦБчЖчӘ¬Ц±ҢУУлЗэ¶ҮЖчКдіцПаБ¬Ә¬ИзНә4 ЛщКңҰӘ

Нә4. PA4000A\ КдіцІвБү ¶ФУЪКдіцµзБчі¬№э30 A µДВцүнµчЦЖЗэ¶ҮЖчӘ¬ДъүЙТФК№УГНвІүµзБчө«ёРЖч»тНвІүµзБч·ЦБчЖчҰӘМ©үЛ№«ЛңМṩ¶аЦЦ№М¶ЁғЛРДµзБчө«ёРЖчӘ¬ЧоёЯµзБчөп1000 AҰӘХвР©ө«ёРЖч°ьАЁµзАВӘ¬КµПЦУлPA4000 µДүмЛЩБ¬ҢУӘ¬ІұАыУГТЗЖчµД15 V Ц±БчµзФөҰӘµ±PA4000 №¦ВК·ЦОцТЗУлНвІү·ЦБчЖчТ»ЖрК№УГК±Ә¬ДъүЙТФҢ«·ЦБчЖчУлНвІү·ЦБчµзС№КдИлПаБ¬ҰӘХвР©КдИлүЙТФІвБүөУX V µҢY V µД·ЦБчКдіцҰӘ¶ФУЪµзБчө«ёРЖчғННвІү·ЦБчЖчӘ¬ЦШТҒµДКЗӘ¬әЗЧҰХэИ·ЙиЦГЛх·Е±ИАэҰӘ МШ±рКЗ¶ФУЪµНµзБчЗэ¶ҮЖчӘ¬ Из№ыүЙДЬӘ¬ У¦µ±Ң«PA4000 Ц±ҢУУлВцүнµчЦЖКдіц¶ЛПаБ¬ҰӘХвКЗТтОҒӘ¬ңҰ№ЬҢ»БчµзБч±дС№ЖчғН»ф¶ыР§У¦µзБчө«ёРЖчФЪҢПёЯµзБчК±МṩБәғГµДң«¶ИӘ¬µ«¶ФУЪәё°ІЕаµДҢПµНµзБчӘ¬ЖдҢб№ың«¶ИНщНщҢПІоҰӘ ңҰ№ЬФЪВцүнµчЦЖЗэ¶ҮЖчКдіц¶ЛіцПЦә«ёЯµД№ІДӘµзС№Ә¬ОҒБЛөУµзБч·ЦБчЖчµГµҢУЕТмµДҢб№ыӘ¬PA4000 КдИлµзВ·ТСңУЕ»ҮҰӘ·ЦБчЖчБҢ¶ЛµзС№үЙДЬЦ»УРәёғБ·ьӘ¬µ«·ЦБчЖчµзКЖПа¶ФУЪҢУµШ¶ЛЙППВІЁ¶Ү·щ¶ИёЯөпКэ°Щ·ьӘ¬ГүОұГлёЯөпКэЗ§·ьҰӘ ЛдИ»ІЙУГБҢ±н·ЁК±Ә¬PA4000 Ц»УРБҢёцНЁµАУГУЪІвБүӘ¬µ«ёГТЗЖчҢ«ТФКёБү·ҢКҢәЖЛгғНПФКңµЪИэМхӘЁ·ЗІвБүӘ©ПЯВ·µДµзБчЦµҰӘХвҢ«ОҒИЁғвёғФШМṩУРәЫЦµµДәмІйҰӘөЛНвӘ¬УЙУЪБҢ±н·ЁІ»РиТҒ·ЦОцТЗµДµЪИэёцНЁµАӘ¬ЛьүЙТФУГЧч¶АБұµДІвБүНЁµАӘ¬ИзІвБүВцүнµчЦЖЗэ¶ҮЖчДЪµДЦ±БчЧЬПЯӘ¬ПкәыµЪ7 Іү·ЦҢйЙЬҰӘ Т»µ©·ЦОцТЗҢшРРБ¬ҢУғНЕдЦГНк±ПӘ¬ЛьҢ«АыУГСҰ¶ЁµДВЛІЁЖчІвБүЗэ¶ҮЖчКдіц№¦ВКҰӘИз№ыPA4000 ІвБүЖµВКУРА§ДСӘ¬У¦И·±ӘТСңЦё¶ЁХэИ·µДВЛІЁЖчЖµВК·¶О§ҰӘ ЧұТвӘ¬VrmsҰұArms ғН№¦ВККэЧЦКЗНЁ№эФ¤№эВЛЦµІвµГµДӘ¬ТтөЛ°ьАЁЛщУРµДёЯЖµ·ЦБүӘ¬ЖдЦР»щІЁЦµЦ»үәВЗ¶ФВнөпУРУГ№¦µД№±ПЧҰӘµзС№УРР§ЦµУл»щІЁµзС№өжФЪПФЦшІоТмКЗғЬХэіӘµДҰӘНЁіӘӘ¬ФЪµзБчғН№¦ВКЦ®әдµДІоТмҢПРҰӘ¬ТтОҒёРУ¦Внөп¶ФµзБчҢшРРБЛ№эВЛҰӘ НЁ№эSUM НЁµА¶БИҰµДЧЬ№¦ВКғН»щІЁ№¦ВКЦ®әдµДІоТмӘ¬үЙТФ№АЛгёЯЖµЛрғДҰӘХвөъ±нВцүнµчЦЖЗэ¶ҮЖчМṩµДµзБ¦Ә¬ХвІү·ЦµзБ¦¶Ф»ъРµКдіц№¦ВКГ»УР№±ПЧӘ¬ТтөЛФцәУБЛВнөпµДИИБү: ёЯЖµЛрғД= ЧЬ№¦ВК - »щІЁ№¦ВК µ±ҢшРРВцүнµчЦЖЗэ¶ҮЖч±ИҢПК±Ә¬ХвКЗ·ЗіӘУРТвТеµДІвБүҰӘ 6. Зэ¶ҮЖчЦ±БчЧЬПЯІвБү ЛдИ»ВцүнµчЦЖЗэ¶ҮЖчКдИлғНКдіцЦ®әдµДБ¬ҢУіЖОҒЦ±БчЧЬПЯӘ¬µ«ХвёцЧЬПЯЙПµДµзС№ғНµзБчФ¶·ЗөүЦ±БчӘ¬ТтөЛӘ¬ФЪҢшРРЛщРиµДІвБүК±±ШРлРҰРДҢчЙчҰӘ Ц±БчЧЬПЯІвБүЧоғГФЪөжөұµзИЭЖчКдИл¶ЛҢшРРӘ¬ИзНә5ЛщКңӘ¬ТтОҒөУ±ңЦКЙПҢІӘ¬ХвАпµДµзБчКЗАөЧФҢ»БчµзФөµДµНЖµµзИЭЖчідµзВціеӘ¬КЗөУДж±дЖчОьКХµДёЯЖµµзБчВціеЦРКН·ЕіцАөµДҰӘ

Нә5. ЙиЦГЦ±БчЧЬПЯІвБү  ±н3. Ц±БчЧЬПЯ№ШәьІвБүІОКэ Из№ы¶АБұҢшРРЦ±БчЧЬПЯІвБүӘ¬үЙТФАыУГ·ЦОцТЗµДCH1( НЁµА1)ҰӘІ»№эӘ¬Ц±БчЧЬПЯІвБүНщНщУлЗэ¶ҮЖчКдИл»тКдіцµДИэПа¶юПЯІвБүТ»ЖрҢшРРҰӘФЪХвЦЦЗйүцПВӘ¬У¦µ±К№УГКӘУа¶АБұФЛРРНЁµАЦРДіёцНЁµА¶ФЦ±БчЧЬПЯҢшРРІвБүҰӘ АэИзӘ¬Ң«CH1 ғНCH2 Б¬ҢУӘ¬ҢшРРКдИл»тКдіцІвБүҰӘCH3 УлЦ±БчЧЬПЯПаБ¬Ә¬ИзНә5 ЛщКңҰӘК№УГF[7] СҰФсВцүнµчЦЖВнөпЗэ¶ҮЖчКдИл»тКдіцДӘКҢӘ¬ІұЖф¶Ү¶АБұµДCH3ҰӘ 7. Зэ¶ҮЖчКдИлІвБү өУ±ңЦКЙПҢІӘ¬өу¶аКэВцүнµчЦЖВнөпЗэ¶ҮЖчКдИлµзВ·КЗИэПа¶юә«№ЬХыБчЗЕӘ¬Іұ°ьғ¬µзИЭВЛІЁЖчӘ¬ИзНә6 ЛщКңҰӘ 
Нә6. ВцүнµчЦЖЗэ¶ҮЖчµДКдИлХыБчЖчғНВЛІЁЖчә¶ ГүёцКдИлПаµДµзБчІЁРОУЙОҒөжөұµзИЭЖчідµзµДВціеЧйіЙҰӘНә7 ёшіцДіПаµДµзБчІЁРОӘ¬Ль°ьАЁµзФөЖµВКµД»щІЁ·ЦБүТФә°өуБүРіІЁ·ЦБүҰӘ

Нә7. ВцүнµчЦЖЗэ¶ҮЖчКдИл¶ЛµзС№ғНµзБчІЁРО Из№ыЗэ¶ҮЖчµДДж±дЖчІү·ЦОҒКдИлµзВ·МṩһёцғгБчёғФШӘ¬ДЗГөГүПаµДКдИлµзБчҢ«КЗТ»ёцХс·щғг¶ЁµДК§ХжІЁРОӘ¬ИзНә7 ғННә8 ЛщКңҰӘ

Нә8. ОөңµчЦЖµДКдИлµзБчІЁРО ТЕғ¶µДКЗӘ¬ВцүнµчЦЖЗэ¶ҮЖчµДДж±дЖчІү·ЦүЙДЬІ»ПтКдИлµзВ·МṩғгБчёғФШӘ»ФЪХвЦЦЗйүцПВӘ¬өУµзИЭЖчОьКХµзБчµДёғФШµзБчҢ«КЬµҢКдіцЖµВК·ЦБүµДУ°ПмҰӘХвТвО¶ЧЕӘ¬АөЧФҢ»БчµзФөµДµзБчФЪ№¤ЖµЖµВККЗёөФУµДҰұК§ХжµДµзБчІЁРОӘ¬ЛьУЙЗэ¶ҮЖчЖµВКҢшРРµчЦЖҰӘНә9 ёшіцЖдІЁРОҰӘµчЦЖүЙДЬСПЦШУ°ПмІвБүӘ¬МШ±рКЗФЪµНЗэ¶ҮЛЩВКӘ¬І»№эӘ¬АыУГА©Х№µДІвБүЗшәдӘЁОҒЗэ¶ҮЖчКдіцІЁРОЦЬЖЪХыКэ±¶Ә©Ә¬үЙТФҢвңцХвёцОКМвҰӘ

Нә9. ФЪКдіцЖµВКө¦ҢшРРµчЦЖµДКдИлµзБчІЁРО PA4000 Ц§іЦВцүнµчЦЖЗэ¶ҮЖчКдИ빦ВКµДң«ГЬІвБүӘ¬әөК№Внөпө¦УЪµНЖµК±ҰӘКдИ빦ВКІвБүУлҢ»Бч№¤ЖµН¬ІҢӘ¬µ«НЁ№эµчҢЪПФКңЖБёьРВЛЩВКә°ңщЦµЙиЦГӘ¬үЙТФА©Х№ІвБүЗшәдҰӘ

±н4. СҰФсПФКңЖБёьРВК±әдғНңщЦµӘ¬°СЗэ¶ҮЖчКдіцЖµВК¶ФЗэ¶ҮЖчКдИ빦ВКІвБүµДУ°ПмҢµµҢЧоРҰ ¶ФУЪі¬№э20 Hz µДКдіцЖµВКӘ¬PA4000 µДД¬ИПЙиЦГНЁіӘҢ«ёшіцОИ¶ЁҢб№ыҰӘД¬ИПЙиЦГКЗӘғ ПФКңЖБёьРВЛЩВКӘғ0.5 s ЖҢңщӘғ10 µ±КдіцЖµВКФЪ5 Hz Ұ« 20 Hz Ц®әдК±Ә¬Ң«ңщЦµЙиЦГОҒ10Ә¬ТФёДҢшОИ¶Ё¶ИӘ»¶ФПФКңЖБёьРВК±әдҢшРРЙиЦГӘ¬К№Ц®°ьАЁІвµГµДВцүнµчЦЖКдіцЦЬЖЪ(1/f) µДХыКэ±¶ҰӘёщңЭңСй·ЁФтӘ¬У¦Мṩ10 ёцЦЬЖЪҰӘ АэИз: КдіцЖµВК = 5.5 Hz ПФКңЖБёьРВЛЩВК = 10/(5.5 Hz)= 1.8 s ¶ФУЪµНУЪ5 Hz µДКдіцЖµВКӘ¬К№УГЧоі¤µДПФКңЖБёьРВЛЩВК(2 s)Ә¬ЖҢңщОҒ10ҰӘ АэИзӘ¬¶ФµӨПаЗэ¶ҮЖчҢшРРІвБүК±Ә¬Из№ы¶БКэМ«өуӘ¬үЙТФҢ«ңщЦµЙиЦГОҒ10 ТФЙПӘ¬ТФ°пЦъК№ІвБүОИ¶ЁҰӘ ·ЦОцТЗНЁ№эИэПаИэПЯЕдЦГҢшРРБ¬ҢУӘ¬ИзНә10 ЛщКң( әөЛщОҢµДБҢ±н·ЁӘ¬№ШУЪАыУГn-1 МЁ№¦ВК±нүЙТФІвБүНЁ№эn МхПЯВ·ПтПµНіМṩµзФөµДЦ¤ГчӘ¬ЗлІОәыУ¦УГЦёДПӘғИэПаІвБүФАн)ҰӘ

Нә10. ИэПаИэПЯБ¬ҢУ ФЪХвёцПЯВ·ЕдЦГЦРӘ¬үЙДЬК№УГ·ЦОцТЗµДµЪИэНЁµАғНµЪЛДНЁµАӘ¬ТФІвБүЗэ¶ҮЖчКдіц»тЗэ¶ҮЖчДЪµДЦ±БчЧЬПЯҰӘ ӘЁПВЦЬӘ¬ОТГЗҢ«·ЦПн±ңОДµДПВ°лІү·ЦӘ¬Ң«°ьҰ°ЛрғДУлР§ВКІвБүӘ¬ТФә°ИзғОБ¬ҢУҰұИзғОСҰФсµзБчө«ёРЖчҰ±µИ»°МвӘ¬ңөЗлЖЪөэҰӘӘ© 8. ЛрғДУлР§ВКІвБү¶ФИОТвПµНіӘ¬ТҒПл¶ФЖдЛрғДғНР§ВКҢшРРІвБүӘ¬ЧоғГ¶ФПµНіКдИлғНКдіцҢшРРН¬ІҢІвБүӘ¬ИзНә11 ЛщКңҰӘ

Нә11. Р§ВКІвБүНә ¶ФУЪёЯР§ПµНі( ИзВцүнµчЦЖЗэ¶ҮЖч) АөЛµӘ¬ХвТ»µгМШ±рЦШТҒҰӘХвКЗТтОҒӘ¬Из№ы¶ФКдіцғНКдіц·ЦүҒІвБүӘ¬¶шЗТФЪІвБүЦ®әд№Ш±ХПµНіАөЗР»»ТЗЖчӘ¬ДЗГөңНІ»ДЬКәЦХИ·±ӘБҢёцІвБүңЯУРНкИ«ПаН¬µДёғФШМхәюҰӘИз№ығцКУёғФШМхәюµДИОғОІоТмӘ¬ДЗГө¶ә»бµәЦВІвµГЛрғДµДОуІоҰӘ АэИз:ЙиЦГNumber 1 ҰҒ ІвБүКдИлҰӘ 
№Ш±ХПµНіӘ¬ЦШРВБ¬ҢУКдіцІвБүӘ¬ІұФЩөОүҒЖфПµНіӘғЙиЦГNumber 2 ҰҒ ІвБүКдіц( µ«МхәюЙФОұ±д»Ү)ҰӘ 
±нПЦЛрғД = 1052.6 W - 1020 W = 32.6 WКµәКЛрғД = 1073.7 W - 1020 W = 53.7 WХвЛµГчІвµГµДЛрғДОуІо·ЗіӘөу!ОҒБЛ±ЬГвХвАаОуІоӘ¬ДъүЙТФК№УГ4 НЁµАТЗЖчӘ¬ИзPA4000 №¦ВК·ЦОцТЗӘ¬ЛьДЬ№»¶ФЗэ¶ҮЖчКдИлғНКдіцН¬К±ҢшРРБҢ±н·ЁІвБүӘ¬ИзНә12ЛщКңҰӘ 
Нә12. АыУГБҢ±н·ЁКµПЦPA4000 УлЗэ¶ҮЖчКдИлҰұКдіц¶ЛБ¬ҢУ К№УГХвёц·Ң·ЁҢ«И·±Әң«И·ІвБүӘ¬әөК№КдИлғНКдіцІвБүЦ®әдµДМхәюүЙДЬЙФУР±д»ҮҰӘМхәюµДЙФОұ±д»ҮОЮ№ШҢфТҒӘ¬ТтОҒГүөОР§ВКІвБү¶әКЗН¬ІҢІвБүҰӘ 9. ҢшРРБ¬ҢУ ¶ФВнөпЗэ¶ҮЖчҢшРРµзС№Б¬ҢУНЁіӘЦ»КЗРҰКВТ»Ч®Ә¬ТтОҒ¶ФёчПаЦ®әдµзС№ҢшРРІвБүҰӘҢшРРµзБчБ¬ҢУФтёьңЯМфХҢҰӘҢшРРµзБчБ¬ҢУЦчТҒУРБҢЦЦ·ҢКҢҰӘµЪТ»ЦЦКЗ·ҢКҢҰ°·ЦёоҰ±µә МеӘ¬ІұК№µзБчНЁ№эµзБч·ЦБчЖчӘ¬И»ғуІвБүµзБч·ЦБчЖчБҢ¶ЛµзС№ҢµҰӘЛдИ»ХвЦЦ·ҢКҢФЪµШ№¦ВКЗйүцПВүЙРРӘ¬µ«µ±µзБчҢПёЯК±Ә¬ФтРРІ»НЁҰӘ ¶ФУЪөуµзБчӘ¬үЙДЬК№УГµзБчө«ёРЖчҰӘНЁіӘӘ¬ХвЙжә°µҢК№іхә¶µзБчФШБчµәМеУлµзБчІвБүЙи±ёПаБ¬ҰӘІвБүЙи±ёЙъіЙТ»ёцУліхә¶µзБчіЙ±ИАэµДөОә¶µзБчҰӘ Т»°гЗйүцПВӘ¬ХвРиТҒНЁ№эµзБчІвБүЧ°ЦГµДіхә¶ФШБчµәМеө«µЭҰӘІвБүЙи±ёөөҢЁТ»ёцУліхә¶µзБчіЙ±ИАэµДөОә¶µзБчҰӘ ОҒКІГөК№УГµзБчө«ёРЖч? К№УГµзБчө«ёРЖчµДФТтЦчТҒУР3ёцӘғ 1. ХэФЪІвБүµДРЕғЕүЙДЬУлІвБүЙи±ёІ»әжИЭҰӘАэИзӘ¬өуІү·ЦІвКФМЁТЗЖчОЮ·ЁІвБүі¬№э100 A µДµзБчӘ¬¶шХвГөөуµДµзБчКЗөуРНВнөпғНЗэ¶ҮЖчЦРіӘәыµДҰӘ 2. ПыіэІвБүТЗЖчУлІвБүРЕғЕµДсоғПҰӘФЪВцүнµчЦЖЗэ¶ҮЖчЦРӘ¬үмЛЩүҒ№ШµзС№(dV/dt) НщНщФміЙХэФЪІвБүµДКдіцРЕғЕңЯУРғЬөуµД№ІДӘ·ЦБүҰӘёЯ№ІДӘµзС№ёшµзБчІвБүөшАөІ»И·¶ЁРФҰӘК№УГµзБчө«ёРЖчёфАл·ЦОцТЗµДµзБчКдИлғНµзС№ІЁ¶ҮӘ¬өУ¶шПыіэТт№ІДӘТэЖрµДІ»И·¶ЁРФҰӘ 3. ОҒБЛ±гАығН°ІИ«ҰӘФЪВнөпПµНіЦРНщНщөжФЪёЯС№Ә¬¶шЗТµзФөЧиү№НщНщә«µНҰӘИз№ыБ¬ҢУІ»ХэИ·Ә¬үЙДЬФміЙөуБүДЬБүБч¶ҮҰӘ СҰФсХэИ·µДµзБчө«ёРЖчµзБчө«ёРЖчУРРн¶аЦЦӘ¬ФЪВнөпІвБүЦРК№УГµД4 ЦЦЧоіӘәыµзБчө«ёРЖчКЗӘғ 1. µзБчЗҮ 2. ±Х»·»ф¶ыР§У¦ 3. IT РН±Х»· 4. µзБч»ӨёРЖч ОҒБЛФЪВнөпЗэ¶ҮЖчµДµдРНРЕғЕөшүнЦРКµПЦЧоәСРФДЬӘ¬У¦К№УГ±Х»·ө«ёРЖчҰӘФЪЗэ¶ҮЖчКдИлЦРүЙТФК№УГµзБч»ӨёРЖчғНµзБчЗҮӘ¬µ«ФЪЗэ¶ҮЖчКдіцЦРР§№ыФтІ»ғГҰӘХвКЗТтОҒµзБч»ӨёРЖчФЪµНЖµӘЁµНЗэ¶ҮЛЩ¶ИӘ©РФДЬІ»әСӘ¬¶шЗТҢ«ПЮЦЖІвБүУлүҒ№ШУР№ШёЯЖµЖµВКµДДЬБ¦ҰӘ µ±СҰФсө«ёРЖчК±Ә¬ЦШТҒµДКЗүәВЗХэФЪІвБүµДРЕғЕғНІвБүЙи±ёҰӘСҰФсУлРиТҒІвБүµДЧоөуРЕғЕӘЁ°ьАЁ·еЦµӘ©Па¶ФУ¦µДЧоөуКдИл·¶О§ө«ёРЖчҰӘХвҢ«ід·Ц·ұ»Уө«ёРЖч·¶О§µДР§УГҰӘ Дъ»№ПӘНы¶ФІвБүЙи±ё¶шСФӘ¬ФЪІ»ТэЖр№эіеµДЗ°МбПВӘ¬ө«ёРЖчКдіцРЕғЕңҰүЙДЬөуҰӘКдИлРЕғЕФҢөуӘ¬РЕФл±ИФҢёЯӘ¬ІвБүҢб№ыФҢғГҰӘ К№УГµзБчө«ёРЖч¶ФУЪ±Х»·»ф¶ыР§У¦µзБчө«ёРЖчӘ¬У¦µ±ҢчЙчҢшРРБ¬ҢУҰӘҢ«ОҒө«ёРЖчМṩµзФөҰӘµзФөНЁіӘ°ьАЁХэµзФөғНёғµзФөӘ¬¶шЗТ±ШРлМṩЧг№»µзБчӘ¬НЁіӘОҒ10mA Ұ« 50mAҰӘ ө«ёРЖчУ¦µ±ңҰүЙДЬүүҢьІвБүТЗЖчӘ¬ТФҢµµНөОә¶ТэПЯµДµзС№ғНөЕіҰсоғПҰӘ ө«ёРЖчКдіцКЗµӨТ»µзБчКдіцӘ¬РЕғЕғНµзФө№«УГ»ШВ·ҰӘёГКдіцУ¦µ±Ц±ҢУУлІвБүЙи±ёµзБчКдИлµДёЯ¶ЛБ¬ҢУҰӘІвБүЙи±ёµзБчКдИлµДµН¶ЛУ¦µ±Б¬ҢУЦБУлө«ёРЖчµзФөПаН¬µД»ШВ·ҰӘ¶шЗТӘ¬ЛщУРТэПЯУ¦µ±ңҰүЙДЬ¶МҰӘКдіцУ¦µ±үүҢьµзФөБ¬ҢУҰӘөУАнПлҢЗ¶ИүөӘ¬ 3 МхПЯУ¦µ±ҢКғПФЪТ»ЖрҰӘ ФЪВцүнµчЦЖЗэ¶ҮЖч»·ңіЦРӘ¬ФЪРиТҒЗйүцПВӘ¬ҢУµШғНЖБ±ОКЗТ»ёцғГП°№ЯҰӘ ФЪµНБ¬ҢУЦРК№УГүЙµю¶С4mm Ң«К№µНБ¬ҢУғЬИЭТЧҢУµШҰӘ ЖБ±ОµзАВҢ«ёДҢшРФДЬҰӘЖБ±ОҢ«ҢУµШӘ¬ІұУлө«ёРЖчµзФө№«№І¶ЛПаБ¬Ә¬¶шЗТӘ¬ФЪПаУ¦µДµШ·ҢӘ¬ЛьҢ«Улө«ёРЖчҢУµШПаБ¬ҰӘ ЖБ±ОҢ«±Ә»¤µзФөБ¬ҢУУлРЕғЕҰӘ Из№ыіхә¶ФШМеЦРµзБчХә¶о¶ЁµзБч°Щ·ЦВКҢПµНӘ¬»тХЯН¬ІвБүТЗЖчүЙУГµДµзБчБүіМПа±ИӘ¬ө«ёРЖчКдіцҢПµНӘ¬ДЗГөНЁ№эИГµзБч¶аөОНЁ№эө«ёРЖчғЛРДӘ¬үЙТФёДҢшµзВ·РФДЬҰӘ АэИзӘ¬ Из№ыДъЦ»УР1000A КдИлҰұ1A Кдіц(1000:1)ө«ёРЖчӘ¬µ«ДъПӘНыІвБү10A µзБчӘ¬ЗТКдіцµзБчЦ»УР10mAҰӘОҒБЛёьғГµШК№УГІвБүПµНіӘ¬К№іхә¶µәМеНЁ№эө«ёРЖч10 өОӘ¬Ң«К№КдіцµзБчФцәУЦБ100mAҰӘөУіхә¶ФШМеҢЗ¶ИүөӘ¬іхә¶µзБчөУ10A ФцәУЦБ100AҰӘ ¶ФУЪІ»Н¬АаРНµДµзБчө«ёРЖчӘ¬ОҒХэИ·µШ¶БИҰµзБчӘ¬РиТҒ¶ФІвБүТЗЖчҢшРР±ИАэЛх·ЕҰӘТФ1000:1 µзБчө«ёРЖчОҒАэӘ¬КµәКІвБүµДµзБчКЗХжКµµзБчµД1/1000ҰӘТтөЛӘ¬µзБчКдИлРиТҒА©өу1000 ±¶ҰӘ µзБчө«ёРЖчУлPM4000 Т»ЖрК№УГPA4000 µДЙиәЖДүµДКЗУлНвІүө«ёРЖчТ»ЖрК№УГҰӘ ЖдЙиәЖМШРФ°ьАЁӘғ 1. үЙСҰФс+/-15V µзФөӘ¬УлРн¶аіӘУГµД±Х»·µзБчө«ёРЖчТ»ЖрК№УГҰӘ 2. ГүНЁµАµзБчµӨ¶АЛх·ЕҰӘ 3. ғуГж°еҢУµШБ¬ҢУӘ¬әт»ҮµзБчІвБүµНБ¬ҢУµДЖБ±ОУлҢУµШҰӘ 4. ДЪҢЁ1 Arms ·ЦБчЖчӘ¬·ЗіӘККғПµзБчө«ёРЖчКдіцҰӘ Из№ыДъХэФЪК№УГМ©үЛµзБчЗҮ»т±дС№ЖчӘ¬ДЗГөХвР©Йи±ёКдіцКЗ4mm °ІИ«ПгҢ¶ІеЧщҰӘµзАВүЙТФЦ±ҢУІеИлPA4000 µДµзБч·ЦБчЖчҰӘУЙУЪµзБчө«ёРЖч»тµзБчЗҮµДµдРНКдіцµН1AӘ¬ДЪҢЁ1A ·ЦБчЖчКЗёцІ»өнµДСҰФсҰӘ ОҒБЛ»сµГң«И·µДІвБүӘ¬Ц»РиТҒОҒТЗЖчЕдЦГБҢёцІОКэӘғ 1. ·ЦБчЖчСҰФсҰӘХвКЗФЪГүЧй»щөҰЙПЙиЦГµДҰӘ 2. µзБчКдИл±ИАэТтЧУҰӘХвКЗФЪГүНЁµА»щөҰЙПЙиЦГµДҰӘ±ИАэТтЧУКЗ: 
Из№ыДъХэФЪК№УГ±Х»·µзБчө«ёРЖчӘ¬ДЗГөРиТҒПтө«ёРЖчМṩµзФөҰӘPA4000 ДЪЦГµДүЙСҰФсҰА15V µзФө·ЗіӘККғПХвёц№¦ДЬҰӘPA4000 µД+15V ғН-15V µзФө±ШРлУлµзБчө«ёРЖчБ¬ҢУӘ¬ІОәыНә13ҰӘ УЙУЪ±Х»·ө«ёРЖчКдіцНщНщµНУЪ1AӘ¬ТтөЛA1A Б¬ҢУЖчНЁіӘКЗёьғГµДСҰФсҰӘµзБчНЁµАµДAlo Б¬ҢУЖч±ШРлУлө«ёРЖчµзФөБ¬ҢУЖчµД№«№І¶ЛПаБ¬ҰӘ ОҒБЛ»сµГЧоәСРФДЬӘ¬3 ёцБ¬ҢУЖчУ¦µ±ҢКғПФЪТ»ЖрІұҢшРРЖБ±ОӘ¬ЖБ±ОБ¬ҢУЦБө«ёРЖчµзФө№«№І¶ЛҰӘө«ёРЖчµзФө№«№І¶ЛУ¦µ±УлPA4000 ғуГж°еµДҢУµШ¶ЛПаБ¬ҰӘ 10. ¶ҮМ¬ёғФШМхәюПВµДЗэ¶ҮЖчРФДЬ ВцүнµчЦЖЗэ¶ҮЖчµД№¦ғДғНКдіцМШРФЛжЧЕВнөпёғФШ±д»ҮҰӘЛдИ»ДъµДІвКФРТйүЙДЬµчУГңЯМеПЯВ·»тёғФШМхәюПВµДІвКФ Ә¬µ«ДъүЙДЬ»№РиТҒәмІй±д»ҮМхәюПВµД№¦ВКМШРФҰӘ¶ФёғФШ±д»ҮЖЪәдµД№¦ВКМШРФҢшРР·ЦОцүЙДЬІъЙъөуБүКэңЭӘ¬І»№эӘ¬УРБЛККµ±µДИнәюғНПаЕдµД·ЦОцТЗӘ¬ДъүЙТФЛжЧЕёғФШ»т ЖдЛыМхәю±д»ҮӘ¬АыУГәЖЛг»ъАөЛСәҮғН·ЦОцІвБүКэңЭҰӘ ФЪХвР©У¦УГЦРӘ¬№¦ВК·ЦОцТЗңНПсТ»ёцң«ГЬІвБүПµНіӘ¬үмЛЩПтәЖЛг»ъ·өАҰКэңЭӘ¬ІұөжөұКэңЭӘ¬УГУЪҢшТ»ІҢ·ЦОцҰӘ Нә14 ёшіцМ©үЛPWRVIEW ИнәюКХәҮµДАөЧФPA4000№¦ВК·ЦОцТЗµДІвБүКэңЭӘ¬PA4000 АыУГµӨПаПЯВ·КдИлғНИэПаЗэ¶ҮЖчКдіцУлВцүнµчЦЖЗэ¶ҮЖчПаБ¬ҰӘіэБЛКХәҮКэңЭӘ¬ёГИнәю»№ФКРнДъ¶Ф·ЦОцТЗҢшРРүШЦЖӘ¬ХвСщүЙТФФЪәЖЛг»ъЙП¶ФЖдҢшРРЕдЦГҰӘ Нә15 ёшіцИэПаКдИл¶БКэµДКµАэӘ¬°ьАЁПкПёµДµзС№ҰұµзБчғН№¦ВКРіІЁНәҰӘ 
Нә14. PWRVIEWИнәюПФКңіцВцүнµчЦЖВнөпЗэ¶ҮЖчµД¶аёц№¦ВКІОКэҰӘ 
Нә15. әЗВәЛжК±әд±д»ҮµДІвБүКэңЭӘ¬Іұ»жЦЖНә±н( ИзХвАпЛщКңµДMicrosoft Excel)ҰӘёГНәёшіцВнөпЖф¶ҮЖЪәдµДІвБүКэңЭҰӘ 11. ҢбКшУп ДүЗ°Ә¬ВцүнµчЦЖВнөпЗэ¶ҮЖчХэіЙОҒ±дЛЩВнөпүШЦЖµДЦчТҒ·Ң·ЁӘ¬І»ҢцУГУЪ№¤ТµБмУтӘ¬¶шЗТУГУЪµз¶ҮЖыіµғНәТУГүХµч»ъµИЦо¶аБмУтҰӘВцүнµчЦЖЗэ¶ҮЖчІъЙъёөФУІЁРОӘ¬ОЮВЫ КЗЖдКдіцЦБВнөпӘ¬»№КЗОҒЗэ¶ҮЖчМṩµзФөҰӘМ©үЛPA4000 №¦ВК·ЦОцТЗАыУГТµҢзКЧөөµДВЭРэ·ЦБч(SpiralShuntTM) әәКхТФә°¶ҮМ¬ЖµВКН¬ІҢәәКхҢвңцХвёцОКМвӘ¬КµПЦ¶ФЗэ¶ҮЖч»щЖµµДОИ¶ЁёъЧЩҰӘ ХвПоәәКхәУЙПВцүнµчЦЖКдіцµДМШКвФЛРРДӘКҢӘ¬үЙМṩіЦРшµДң«И·ІвБүҰӘёГәәКх¶ФКэңЭҢшРРёЯЛЩІЙСщӘ¬¶ФЖдЧЬМеКэБү( °ьАЁЛщУРРіІЁғНФШІЁ·ЦБү) ҢшРРКµК±әЖЛгҰӘУлөЛН¬К±Ә¬Ль¶ФІЙСщКэңЭҢшРРКэЧЦ»ҮВЛІЁӘ¬МṩµНЖµІвБүӘ¬Из»щЖµІвБүғНКдіцЖµВКІвБүӘ¬К№µГPA4000 іЙОҒВцүнµчЦЖЗэ¶ҮЖчІвБүµДАнПлҢвңц·Ң°ёҰӘ |




НшУСЖАВЫ