
ЧФККУҰКэЧЦФӨК§Хж·ЕҙуЖчөДЛг·ЁСРҫҝ
·ўІјКұјдЈә2010-10-31 20:29
·ўІјХЯЈәconniede
|
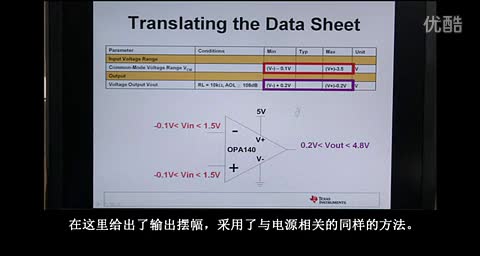
1 ТэСФ ФЪ»щУЪІйХТұнөДЧФККУҰФӨК§Хж·ЕҙуЖчЦРЈ¬ЧоРЎҫщ·ҪLMS(1east-mean-square)Лг·Ё№г·әІЙУГМбіцөД№ЫөгЎЈіхКјКХБІЛЩ¶ИЎўКұұдПөНіёъЧЩДЬБҰј°ОИМ¬К§өчКЗәвБҝЧФККУҰВЛІЁЛг·ЁУЕБУөДЧоЦШТӘјјКхЦёұкЎЈLMSЛг·ЁөДИұөгКЗКХБІЛЩ¶ИВэЎЈОӘБЛМбёЯLMSЛг·ЁөДКХБІЛЩ¶ИЈ¬ОДПЧМбіцёДҪшөДБҪёц·Ҫ·ЁЈәКдИлРЕәЕИҘПа№ШәНҫЎҝЙДЬФцҙуІҪіӨІОКэЎЈ¶ФУЪКдИлРЕәЕИҘПа№Ш·ҪГжЈ¬СРҫҝБЛ·ЦҝйLMSЛг·ЁЈ¬DCT-LMSЛг·ЁЈ¬№йТ»»ҜLMSЛг·ЁЎЈ¶шФцҙуІҪіӨІОКэ·ҪГжЈ¬·ўПЦЧУҙшЧФККУҰLMSЛг·ЁЈ¬SVSLMSЛг·ЁЈ¬ёДҪшөДSVSLMSЛг·ЁЎЈёщҫЭТФЗ°өДСРҫҝЈә№М¶ЁІҪіӨөДЧФККУҰВЛІЁЛг·ЁФЪКХБІЛЩ¶ИЎўКұұдПөНіёъЧЩЛЩ¶ИУлКХБІҫ«¶И·ҪГж¶ФЛг·ЁІҪіӨТтЧУөДТӘЗуКЗПа»ҘГ¬¶ЬөДЎЈОӘҪвҫцХвТ»Г¬¶ЬЈ¬МбіцLMSЛг·ЁөДІҪіӨөчХыФӯФтЈ»ФЪіхКјКХБІҪЧ¶О»тОҙЦӘПөНіІОКэ·ўЙъұд»ҜКұЈ¬ІҪіӨУҰҪПҙуЈ¬ТФұгУРҪПҝмөДКХБІЛЩ¶ИәН¶ФКұұдПөНіөДёъЧЩЛЩ¶ИЈ»¶шФЪЛг·ЁКХБІәуЈ¬УҰұЈіЦәЬРЎөДІҪіӨТФҙпөҪәЬРЎөДОИМ¬К§өчФлЙщЎЈ ФЪЙоИлСРҫҝЧФККУҰЛг·ЁөД»щҙЎЙПЈ¬МбіцТ»ёцРВөДұдІҪіӨLMSЛг·ЁІўУлТФЗ°Лг·ЁПа¶ФұИ·ВХжЎЈРВЛг·ЁТСУГУЪФӨК§Хж·ЕҙуЖч·ВХжІўИЎөГБјәГР§№ыЎЈ 2 КэЧЦФӨК§Хж·ЕҙуЖч Нј1ОӘКэЧЦФӨК§Хж·ЕҙуЖчөД»щұҫҪб№№Ј¬ФӨК§ХжЖч°ьАЁІйХТұнәНЧФККУҰФӨК§ХжІОКэ№АјЖЈ¬·ҙАЎөДКдіцРЕәЕVoutәНКдИлРЕәЕVinҫӯЧФККУҰЛг·ЁјЖЛгёьРВІйХТұнЦРөДФцТжПөКэЈ¬ҙЛФцТжПөКэУлКдИлРЕәЕЧціЛ·ЁФЛЛгөГөҪФӨК§ХжРЕәЕVpdТ»°г¶шСФЈ¬ФӨК§ХжЖчТӘІ№іҘөДКЗУЙ·ЕҙуЖч·ЗПЯРФҙшАҙөД·щ¶И·ЗПЯРФК§ХжәНПаО»·ЗПЯРФК§ХжЎЈФӨК§ХжЖчөДКдИлКдіц№ШПөұнКҫОӘЈә КҪЦРЈәF(ЎӨ)ОӘФӨК§ХжЖчөДФцТжәҜКэЎЈ 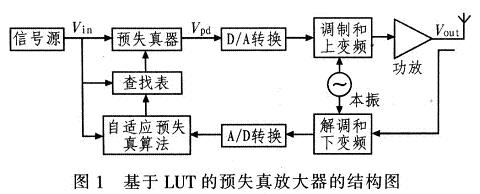 №ҰВК·ЕҙуЖчөДКдіцЈә КҪЦРЈ¬G(ЎӨ)ОӘ№ҰВК·ЕҙуЖчөДФцТжәҜКэЎЈ КҪ(2)ҙъИЛКҪ(1)Ј¬ФтУРЈә РЕәЕҫӯ№эЧФККУҰФӨК§Хж·ЕҙуЖчЦ®әуЖдКдіцОӘЈә  3 ІйХТұнөДЧФККУҰЛг·Ё LMSЛг·ЁЦРЈ¬БоRin(n)ОӘКдИлРЕәЕөДЧФПа№ШҫШХуЎЈW(n)ОӘійН·ИЁПтБҝЈ¬ДЗГҙУРЈә  КҪЦРЈәd(n)ОӘЖЪНыРЕәЕЈ»e(n)ОӘЖЪНыРЕәЕУлКдіцРЕәЕөДОуІоРЕәЕЈ»ҰМОӘІҪіӨІОКэЈ¬ҰМ(n)=ҰВ(1-exp(-ҰБ|e(n)|2))ЎЈ LMSЛг·ЁКХБІөДМхјюОӘЈә0<ҰМ<1ЈҜҰЛmax,ҰЛmaxКЗКдИлРЕәЕЧФПа№ШҫШХуөДЧоҙуМШХчЦөЎЈМбіцёДҪшөДSVSLMSЛг·ЁЈ¬ҙУ¶шМбёЯLMSЛг·ЁөДКХБІЛЩ¶ИЎЈ 4 РВөДЧФККУҰЛг·Ё РВөДЧФККУҰЛг·ЁОӘ 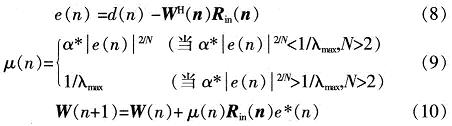 КҪ(9)ЦРҰМ(n)ТӘВъЧг0<ҰМ(n)<1/ҰЛmaxЎЈУЙУЪҰБКЗИЛОӘЦё¶ЁЈ¬ЛщТФҝЙУЙКФСйКЦ¶ОИЎөГЈ¬e(n)КЗОҙЦӘұдБҝЈ¬ЖдіхКјЦөОЮ·Ё№АјЖЈ¬ЛщТФКЧПИТӘЕР¶ПҰБ*| e(n)|2/NКЗ·сРЎУЪ1/ҰЛmaxЎЈө«КЗХв»бФцјУКұјдёҙФУ¶ИЈ¬Из№ыДЬ№»И·ИПҰБ*| e(n)|2/N<1ЈҜҰЛmaxЈ¬ұИИзөЪТ»ҙОөьҙъөДe(n)<1Ј¬ФтҝЙЦұҪУЙи¶ЁҰБОӘРЎУЪ1ЈҜҰЛmaxөДЦөјЖЛгЈ¬ТФұгјхЙЩКұјдёҙФУ¶ИЎЈ 5 ·ВХжҪб№ы УГMATLABҙоҪЁБЛТ»ёцЧФККУҰФӨК§Хж·ЕҙуЖчөДДЈРНЈ¬·ЕҙуЖчК№УГsalehДЈРНЎЈКдИлРЕәЕОӘ256QAMРЕәЕЈ¬·Цұр¶ФSVSLMSёДҪшРНЛг·ЁәНёГРВЛг·ЁҪшРР·ВХж¶ФұИЈ¬ЖдЦРSVSLMSёДҪшРНЛг·ЁөДІОКэИЎЦөОӘҰВ=1Ј¬ҰБ=10Ј¬ёГРВЛг·ЁІОКэИЎЦөОӘҰБ=2Ј¬N=5ЎЈөьҙъ500ҙОөДҪб№ыИзНј2~Нј5ЎЈЖдЦРЈ¬Нј2КЗАнПлөД№Ұ·ЕКдіцРЗЧщНјЈ»Нј3КЗОҙҫӯФӨК§ХжЖчөД№Ұ·ЕКдіцРЗЧщНјЈәНј4КЗІЙУГёДҪшөДSVSLMSЛг·ЁөДФӨК§Хж·ЕҙуЖчөДКдіцРЗЧщНјЈ»Нј5КЗІЙУГРВЛг·ЁөДФӨК§Хж·ЕҙуЖчөДКдіцРЗЧщНјЎЈНЁ№э·ВХжҝЙЦӘЈ¬ёГРВЛг·Ё¶ФФӨК§Хж·ЕҙуЖчөДёДҪшГчПФУЕУЪSVSLMSёДҪшРНЛг·ЁЎЈ 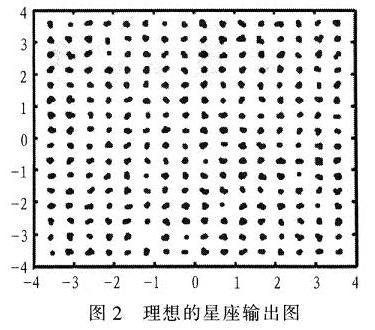  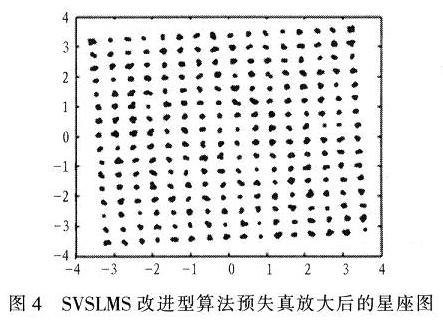 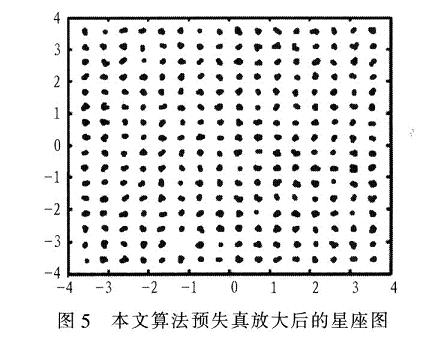 6 ҪбВЫ МбіцТ»ёцРВөДұдІҪіӨLMSЛг·ЁЈ¬НЁ№эОуІоөДЖҪ·ҪәҜКэҝШЦЖІҪіӨөДұд»ҜЈ¬УРәЬәГөДКХБІМШРФЈ¬УГMATLABҙоҪЁБЛФӨК§Хж·ЕҙуЖчөД·ВХжПөНіЎЈ·ВХжұнГчЈәФЪҪшРР500ҙОөьҙъјЖЛгКұёГРВЛг·Ё¶ФФӨК§Хж·ЕҙуЖч·ЗПЯРФМШРФөДёДҪшГчПФУЕУЪёДҪшөДSVSLMSЛг·ЁЎЈ |

НшУСЖАВЫ