
迅为iTOP-i.MX6ULL开发板-移植OpenCv3.4.1
|
本章节将介绍 OpenCV 的移植方法,及结合 Qt 例程去进一步学习 OpenCV 识别图像。本章节使用的资料已经放到了开发板网盘资料中,路径为:“11_Linux 系统开发进阶\86_章节_移植 OpenCv3.4.1 使用资料”。
2.安装 cmake 和 cmake-gui 工具
安装完成提示安装成功,作者是已经安装过了,如图 86.2.3 所示:
3. 进入 build 目录下,执行指令 cmake-gui,开始配置 OpenCV 的环境执行完成后会出现图形化工具cmake-gui。指定我们源码的所在路径和构建目录。勾选 Advanced,再点击 Configure 或者 Generate。
图 86.2.4
4.选择 Unix Makefiles,然后选择 Specify options for cross-compiling,再点击 Next。
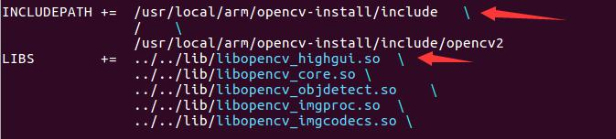
5.填写交叉编译器的路径,注意红色部分请填写自己的交叉编译器路径。
6. 我们还需要配置一些信息,点击如下图 CMAKE 处,在 CMAKE_EXE_LINKER_FLAGS 处添加上-lpthread -lrt -ldl。添加这些是指定依赖库的链接参数。
7.再在 CMAKE_INSTALL_PREFIX 处指定安装目录,我们在上面已经新建了 install 安装目录。我们直接指定到该目录即可。如果不指定,它会默认安装到 Ubuntu 系统目录/usr/local 下。这样会直接替换我们/usr/local 下的库。
8.至此我们配置完,现在我们需要生成 Makefile 等文件,我们先点击 Configure,再点击 Generat 就可以生成了。点击了 Generate 后看到信息像如图 86.2.10 一样,表明生成成功。若出现报错,请根据对话框里的内容指定的文件去自行去检查错误!一般都是交叉编译器路径不对造成的。配置完成生成文件后,我们点击左上角关闭这个图形化配置界面即可。
86.3 译 编译 OpenCV 源码
2.修改完成后,返回于是 build 目录下,可以看到 bulid 目录下已经准备了构建文件。
3.我们直接输入 make -j 16 构建即可。
4.编译完成如图 86.3.4,如果有出错,先删除 build 目录下的所有文件,按第 2 节重新再来一次!
5.输入 make install 安装到指定目录
安装成功如图
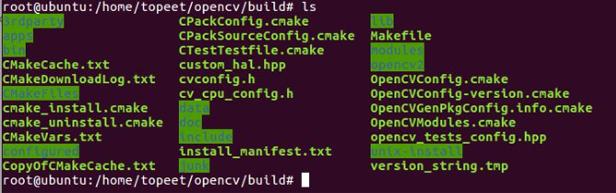
6.进入 install 目录下有如下几个目录表明成功。到此完成编译!
86.4 打包文件系统
2.搭建完成后。在 Ubuntu 终端执行下面的指令来使能 Qt 交叉编译的环境变量。Ubuntu# source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
3.再执行 make 编译 Qt 工程,编译完成如图
4.编译完成后在当前目录生成可执行文件 opencv_pic,如图 所示。
5.我们需要把 opencv_pic 和 1.bmp 图片拷贝到开发板的/home/root/目录下。
然后把 home/topeet/opencv/install/lib 目录下也就是 opencv 的安装目录下的 lib 下的库文件拷贝到开发板 Yocto 系统的 lib/目录下,如图 86.4.6 所示。
6.然后我们使用命令 tar -vcjf ./rootfs.tar.bz2 .将文件系统打包
86.5 烧写文件系统
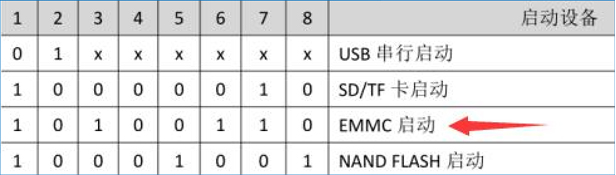
如果您的板子是 NAND 的,修改 cfg.init 如图所示:
2.将 rootfs.tar.bz2 通过 ssh 软件放入 mfgtools 烧写目录 mfgtools_for_6ULL\Profiles\Linux\OSFirmware\files\linux 下面,uboot 和 kernel 使用 i.MX6ULL 终结者光盘资料里开发板系统镜像下面的镜像,如图 所示路径的文件
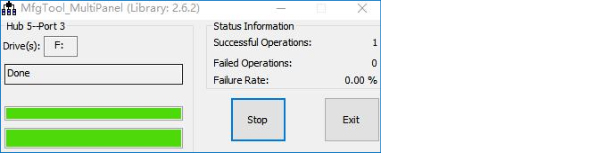
3.拨码开关 2 键拨为 1,其他键为 0,设置成 USB 串行启动,然后点击下图按钮进行烧写。
烧写完成进度条会变成绿色,如图所示:
86.6 测试开发板
如果您的板子是 NAND 的,拨码开关拨成如图 所指箭头
然后启动进入 uboot 模式,设置选择屏幕
最终在屏幕上显示图像
|





















网友评论