晶闸管控制串联电容器应用于弹性交流输电系统的稳定度分析
发布时间:2016-1-8 09:42
发布者:designapp
|
摘要:弹性交流输电系统设备,如晶闸管控制串联电容器(TCSC)、制动电阻、并联电容电抗与静态移相器被用来动态调整网络配置,以提高系统的静态特性和暂态稳定度。现代电力系统庞大而复杂,扰动常改变电网结构并导致非线性响应。本文采用晶闸管控制串联电容器提高电力系统动态稳定度,晶闸管控制串联电容器的阻抗由辅助进相-迟相控制器根据发电机速度偏差进行调整,辅助控制器参数由基于模态控制理论的极点指定法来确定。针对指定的操作点设计控制器,探讨系统在不同加载条件下,不同功率因数,端电压下的闭环特征值灵敏度。并对具有辅助进相-迟相控制器的晶闸管控制串联电容进行检测,以保证电力系统在各运行点的阻尼特性。数值模拟结果表明提出的控制能有效的提高大信号瞬态稳定度和电力传输能力。 传统交流输电网的电流潮流属于自然分布状态,不易控制电流流向。在并联的网路中,当某条线路输送功率改变时,会导致同一并联电路输送电力的改变或导致环流。若传输功率增加时,会造成动态稳定度的恶化或电压崩溃。弹性交流输电系统是指在传统交流输电系统中,引入电力电子技术,提高电网的运行效率。通过引入可控大功率电子元件,使输电网的阻抗、相角可控,使电网功率潮流分布可控,直接控制有功功率和无功功率的传输,提高系统应对紧急事故的灵活性,提高现有输电设备的传输能力和系统稳定度[1-3]。 弹性交流输电系统具有以下优点:(1)电力潮流可弹性控制;(2)输电能力可大幅提高;(3)防止设备与系统故障的累积,避免连锁效应;(4)提升区域间电能传输能力,充分利用发电容量;(5)根据系统需求提供快速灵活补偿,改善供电品质;(6)抑制电力系统振荡。弹性交流输电系统设备,如并联电容电抗、晶闸管控制制动器、静态同步调相器、静态移相器与晶闸管控制串联电容器被用于调整动态网路,以加强系统静态特性与暂态稳定度。对于长距离输电线路,为避免压降过大,常使用晶闸管控制串联电容器提高线路输电能力[4-5] 。 本文在模态控制理论的基础上提出的极点指定法来确定弹性交流输电系统控制器的设计法则,提高控制器适应性以满足电力系统复杂、高度非线性及状态多变的使用特性。 1 晶闸管控制串联电容器 多模块的晶闸管控制串联电容器的结构如图1所示。单个TCSC模块由一个串联电容器并联一个晶闸管控制器,为了防止过电压,还会并联一个金属氧化物可变电阻。一个完整的补偿系统由多个模块串联而成,并且有一个旁路开关,在TCSC故障或维修时将其旁路掉[6-7] 。 TCSC方框图如图2所示,其中Xa为开环辅助信号,如电力潮流控制信号;Xr为TCSC的初始操作点,Xm为调制小信号输入,上述三个信号合成TCSC的控制信号Xd。TCSC的自然响应延迟为时间的单一函数,用TT表示;TCSC的输出等效阻抗受操作模式与容量而存在上下限XTmax和XTmin;XT与固定电容Xf合成Xtotal。 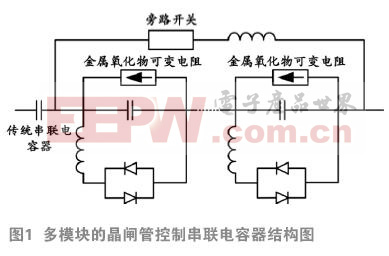 由TCSC方框图得到1阶微分方程式:  (1) TCSC的初始操作点Xr可由系统操作点Xtotal反推得到:  (2) 2 电力系统模型 当电力系统有小负载变动或系统本身发生自发性低频振荡时的动态行为,即小信号稳定度。低频振荡现象是一种转轴的动态行为,其频率大约在0.5 Hz~2Hz之间,可用线性系统中的频域特征值来分析。 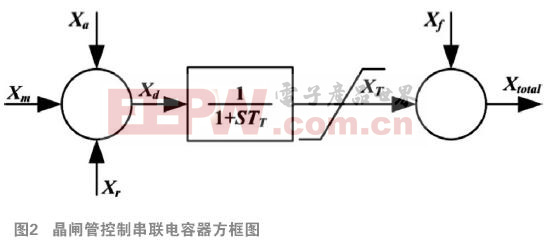 全部的特征值涵盖的频率范围很广,其中对应的低频振荡部分称为系统机电模式。系统低频振荡常导致系统运转困难,严重的可引起系统停机等稳定度问题。 电力系统发生振荡时,若系统有足够的阻尼时,在干扰解除后发电机可迅速恢复到稳定状态。改善稳定度的方法有在静态励磁机系统中外加电力系统稳定器,设计良好的调速器和汽轮机控制器。调整静态功率补偿器的虚功率,并联电抗器和静态移相器,以提高系统的阻尼,提高稳定度。 随着大功率电子元件的快速发展,晶闸管控制串联电容器能有效提升电网的输电效率,增加系统的稳定度。典型的单机无限汇流排电力系统如图3所示,励磁系统采用如图4所示的IEEE Type1励磁机,发电机的非线性动态行为利用双轴模型来描述。 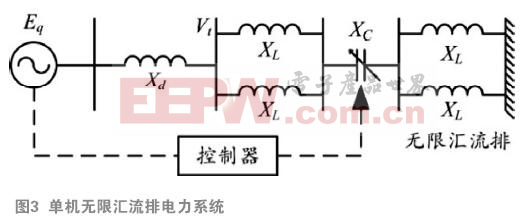 结合发电机、励磁机方框图,得到7个1阶微分方程式,如式(3)至(9)。 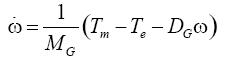 (3) 其中 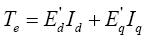 表示发电机经气隙传送的电磁功率。 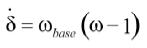 (4)  (5)  (6)  (7)  (8) 其中  为励磁机的饱和函数。  (9) 电网传输线与发电机端电压关系式为:  (10)  (11) 3 特征值分析 未加晶闸管控制串联电容器前的开环系统,其完整的特征值列于表1的第2列,系统的机电振荡模式不稳定。只加入晶闸管控制串联电容器而未加入辅助控制器的完整特征值列于表1第3列,系统的低频振荡阻尼虽有改善,但仍不稳定。所以必须施加控制信号至晶闸管控制串联电容器的控制机构。即  为控制器输出信号。  为使电力系统频率误差量有较好的动态响应,Ui根据系统输出状态量测量值的不同,而随时发生变化。 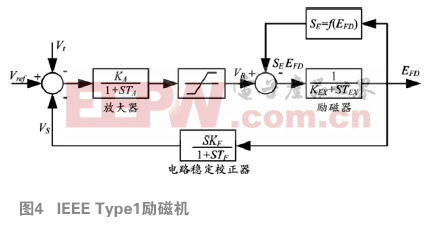 本文利用如图5所示的进相-迟相控制器来增加低频振荡阻尼,控制器的传递函数如式(12),可以化成(13)至(14)两个一阶微分方程式。 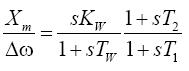 (12) 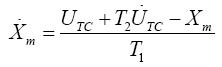 (13) 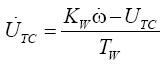 (14) 进相-迟相控制器的参数可以根据基于模态控制理论的极点指定法来决定。将不稳定的低频振荡模式特征值移至预设的稳定位置,经过简单的矩阵运算,可得到控制器的参数值,详细的运算法则如下所示。 对于一个控制系统,其状态方程式可写成:  其中X(t)为n×1开环系统的状态向量; U(t)为m×1系统的输入向量,Y(t)为p×1系统的输出向量,A、B、C均为常数矩阵。经过拉氏变换到频域后,得: 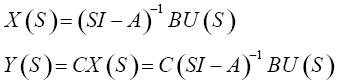 如果输出至控制器的传递函数为U(S),m×p向量,则:  可得:  S代入指定特征值,经矩阵运算后,可得控制器U(S)中的参数。  极点指定法在使用时有以下几点限制: (1)所求得的控制器参数必须合理,且具可行性。如时间延迟常数需为正值,比例放大值不可过大等。 (2)必须使整个系统的特征值稳定。 (3)所指定的极点需合理,且不能影响整个系统其他部位的特性。根据以上法则,求得的结果如下: 预设特征值的低频振荡模式:-1.2±j6.0 进相-迟相控制器的参数为:  ,  。 系统加入TCSC与进相-迟相辅助控制器后的特征值如表1第4列所示,机电模式振荡的特征值准确的落在指定的位置上,其他模式的阻尼也得到了改善。 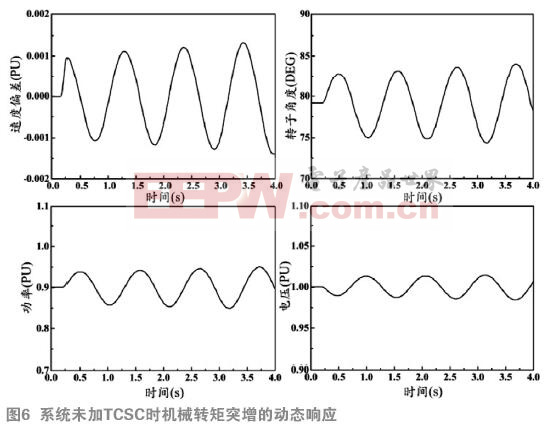 针对特定操作点设计的控制器,讨论控制器的适应性和适用范围,针对系统在不同发电机输出功率、端电压、功率因数的低频振荡模式与发电机特征值分别列于表2-表4。由表2可以看出,低频振荡模式因发电机负载增加而造成阻尼降低。另外由表3可以看出端电压越高时,系统的阻尼越好。由表4可以看出未加入TCSC前,发电机低频振荡模式随功率因数的增加而阻尼变差;加入TCSC后,发电机特征值特性未变,低频振荡模式则随功率因数的增加阻尼变得更好。  4 时域模拟分析 特征值分析是在指定的操作点,对非线性系统作线性化后,分析其特征值稳定度,适合于小信号稳定度分析。由于电力系统有很多限制器和饱和现象,如励磁机、TCSC等,所以需利用非线性微分方程作时域计算机模拟,以验证TCSC与系统动态特性是否与特征值分析结果一致。 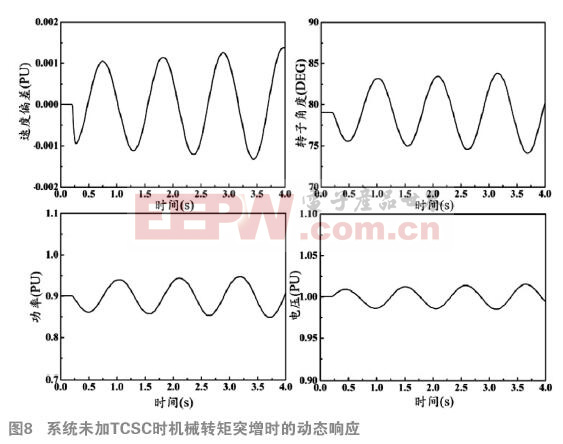 首先,机组在0.2 s时,突然有0.1 pu的机械转矩加入,持续100ms后恢复,未加TCSC前的动态响应如图6所示,系统状态不稳定;加入TCSC与设计的进相-迟相控制器后,系统的动态响应如图7所示,并于未加TCSC的动态响应进行对比,可以看出TCSC能够抑制机电模式低频振荡的效果。相反图8、图9为机组在0.2s时,突然降低0.1pu的机械转矩,持续100 ms后恢复,未加TCSC与加入TCSC与控制器后的系统动态响应图。可知不论机组在加速或减速扰动下,TCSC结合控制器均能有效抑制系统的低频振荡,提高系统的稳定度。 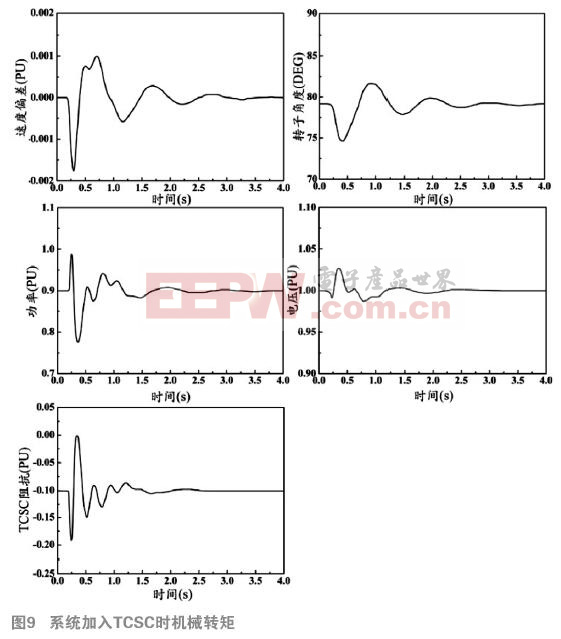 另一种状态下,输电线路2发生断线扰动,输电线路2在0.2 s时并联的双线中的一条线跳脱,持续100 ms后恢复,未加TCSC前的动态响应如图10所示,系统状态不稳定;加入TCSC与设计的进相-迟相控制器后,系统的动态响应如图11所示,可认为TCSC抑制了机电模式的低频振荡效果。 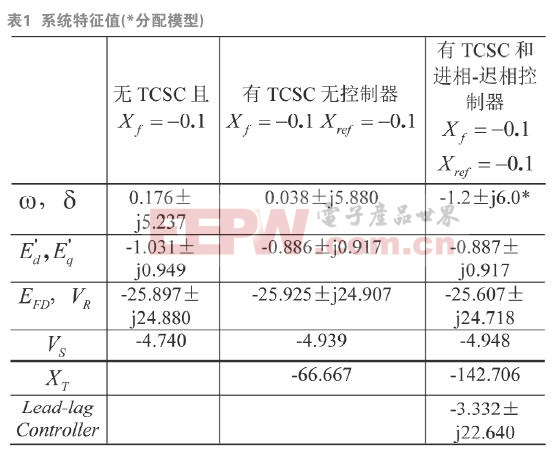 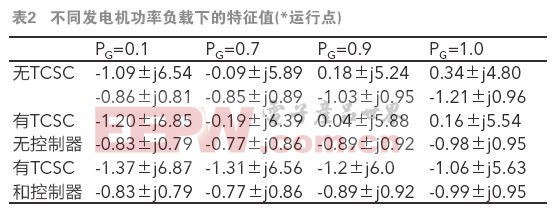 特征值分析与动态模拟结果表明:TCSC在稳态下,可降低传输线阻抗,提高传输线的功率输送量。加入适当的控制器和适当的控制法则后,TCSC不仅能提高电能输送量,还能提高系统的稳定度。从动态模拟中可看出,虽然TCSC的阻抗变动在动态下存在上下限值,但仍可有效抑制低频振荡。 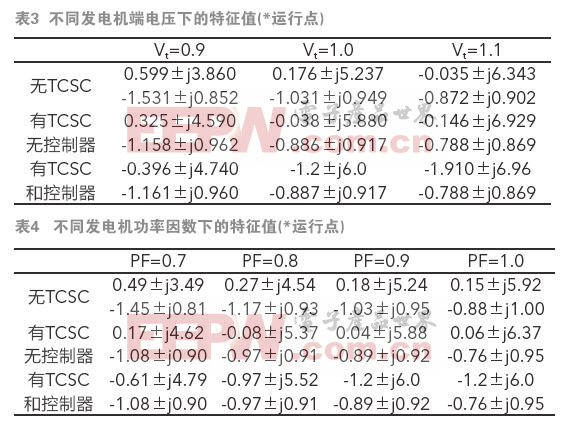 5 结论 本文研究TCSC对电力系统中低频振荡的抑制及对电力系统稳定度的提高。TCSC结构选择适当的模型,并将其加入电力系统模型中,由特征值分析与非线性动态模拟可知:TCSC不仅可以降低输电线路阻抗,提高输电线容量,加入适当的控制器可有效抑制电力系统低频振荡,提高系统稳定度。 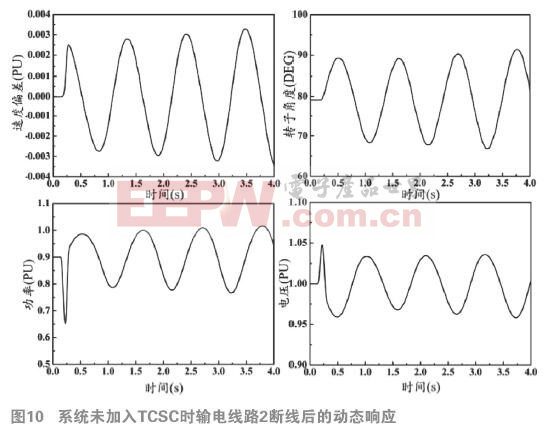 根据本研究获得的初步结论,后续的研究应对多机电力系统中,TCSC装设的位置与效果,以及容量和位置等关系进行研究。除此之外,研究多机电力系统中,TCSC的控制法则,包括选择反馈信号与控制器形态,将TCSC研究成果应用于电力系统,为TCSC用于弹性交流输电系统奠定理论基础。 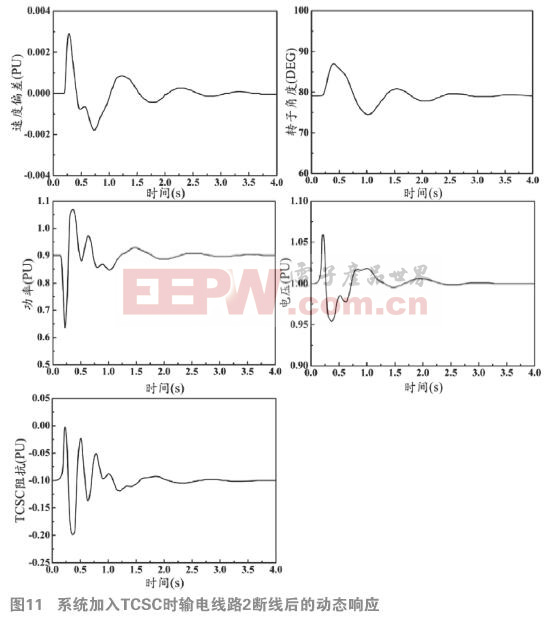 附录:系统参数 (1) 发电机和输电线路 MG=6.44 DG=1.5 RA=0.0 Xd=1.93 Xq=1.74 X’d=0.47 X’q=0.47 T’d0=6.66 T’q0=0.44 Re=0.0 XL1=0.8 XL2=0.8 励磁机和调压器 KA=400 TA=0.02 KEX=1.0 TEX=1.0 KF=0.06 TF=1.0 AEX=0.098 BEX=0.553 VRmax=7.3pu VRmin=-7.3pu (2) 晶闸管控制串联电容器 Xr=-0.1pu TT=0.015s XTmax=0.0pu XTmin=-0.2pu (3) 初始操作状态 PG=0.9pu PF=0.9 Xf=-0.1 参考文献: [1]N.H. Hingorani. High Power Electronics and Flexible AC Transmission Systems [J]. IEEE Power Eng. Rev., 1998: 3-4 [2]N.H. Hingorani. High Power Electronics and Flexible AC Transmission Systems [C]. Presented at international symposium on Electric Energy Conversion in Power Systems, Capri, 1989 [3]S.L. Nilsson. Security Aspects of Flexible AC Transmission System Controller Applications [J]. Electric Power Energy System, 1995, 17(3):173-179 [4]M.R. Mohan, R.K. Varma. 基于晶闸管的柔性交流输电控制装置 [M]. 徐政, 译. 北京: 机械工业出版社, 2005 [5]栗时平, 刘桂英. 静止无功功率补偿技术 [M]. 北京: 中国电力出版社, 2006 [6]何大愚. 柔性交流输电技术和用户电力技术的新发展 [J]. 电力系统自动化, 1999 [7]程汉湘. 柔性交流输电系统 [M]. 北京: 机械工业出版社, 2009, 229-230 |
网友评论