
基于C8051F040的CAN总线智能节点设计
发布时间:2010-12-8 12:07
发布者:techshare
|
“X型火控系统”根据实际需要采用了CAN总线方式来实现其内部单体间的通信。CAN总线是一种用于各种设备检测及控制的现场总线,它是一种多主总线,在高速网络和低成本的节点系统中应用都很广泛。CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。其特点如下: *可以多主方式工作。 *CAN节点只需对报文的标识符滤波即可实现点对点、一点对多点及全局广播方式发送和接收数据。 *CAN总线通信格式采用短帧格式。 *采用非破坏性总线仲裁技术。 *直接通信距离最大可达10km (速率5kb/s以下),最高通信速率可达1Mb/s (此时距离最长为40m),节点数可达110个,通信介质可以是双绞线、同轴电缆或光导纤维。 *CAN总线采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。 C8051F040及其内部CAN控制器 C8051F040内部集成有CAN控制器,主要由CAN内核、消息RAM、消息处理单元和控制寄存器组成,图1为C8051F040集成CAN的结构图。 图1中,CAN内核由CAN控制器和负责消息收发的内部寄存器组成,消息RAM用于存储消息目标和每个目标的仲裁掩码,并且每一个消息目标都有它自己的识别掩码,所有的数据传输和接收滤波都是由CAN控制器完成的。消息处理单元用于根据寄存器中的信息来控制CAN内核中移位寄存器和消息RAM之间的数据传递,同时它还可用来管理中断的产生。 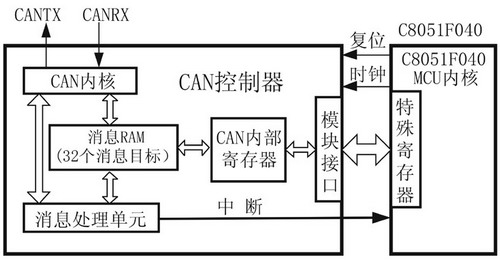 图1 C8051F040集成CAN的结构图 CAN内部寄存器中存储了所有CAN的控制和配置信息,其中包括控制寄存器、状态寄存器、设置波特率的位定时寄存器 、测试寄存器、错误计数器和消息接口寄存器。通常CAN内核不能直接访问消息RAM,而必须通过接口寄存器IF1或IF2来访问。另外,CIP-51的SFR并不能直接访问CAN内部寄存器的所有单元,其配置CAN、消息目标、读取CAN状态以及获取接收数据、传递发送数据都由SFR中的6个特殊寄存器来完成。其中CAN0CN、CAN0TST和CAN0STA3个寄存器可直接获取或修改CAN 控制器中对应的寄存器,而CAN0DATH、CAN0DATL、CAN0ADR 3个寄存器主要用来访问修改其它不能直接访问CAN内部寄存器,其中CAN0ADR用来指出要访问寄存器的地址,CAN0DATH、CAN0DATL这时就相当于要访问的16位寄存器的高、低字节的映射寄存器,而对它们的读写则相当于对所指向寄存器的读写。图2给出了CIP-51如何访问CAN中控制寄存器和每个消息的路径图。 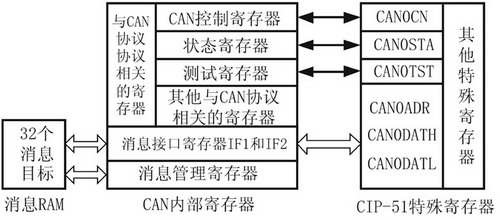 图2 CIP-51访问CAN中控制寄存器和每个消息的路径图 基于C8051F040的CAN智能节点设计 由于CAN总线采用多主方式工作,所以CAN总线系统具有与DCS(分布式控制系统)不一样的拓扑结构。图3所示是某型火控系统的总线系统结构。该系统结构最大的特点就是所有的节点都能以平等的地位挂接在总线上。CAN总线智能节点之间能够相互进行通信,以完成数据交换。一个智能节点通常至少包括三个部分,即负责节点任务控制的单片机、总线控制器及总线收发器。由于C8051F040单片机为内部集成有CAN控制器,因此智能节点主要由C8051F040和CAN收发器TJA1050组成。 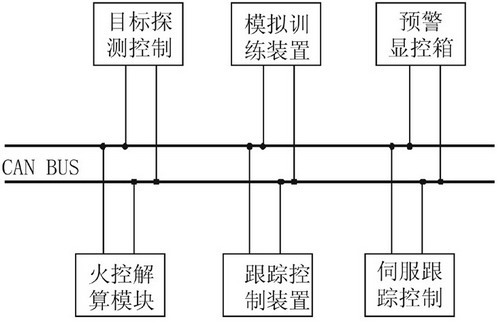 图3 某型火控系统的CAN总线结构 图4是一个以C8051F040为核心的智能节点硬件框图。由于C8051F040集成的是CAN控制器,要使CAN总线得以运行,还需外加CAN总线收发器,常用的CAN总线收发器有Philips公司的PCA82C250收发器、高速TJA1050收发器等。本系统采用了TJA1050高速CAN收发器来替代传统的PCA82C250收发器,TJA1050具有电磁辐射低、防短路、不上电时对总线无影响等特点,它的引脚S可以选择高速或静音两种模式,并可由C8051F040的P4.0控制,CAN总线上两端节点8一般加上两个60W的电阻和47nf的电容对信号吸收,以避免信号反射。为了进一步提高系统的抗干扰能力,在CAN控制器引脚CANTX、CANRX和收发器TJA1050之间并不是直接相连,而是通过由高速光耦6N137构成的隔离电路后再与TJA1050相连,这样就可以很好的实现总线上各节点的电气隔离。这部分增加了节点的复杂性,但它却提高了节点的稳定性和安全性。 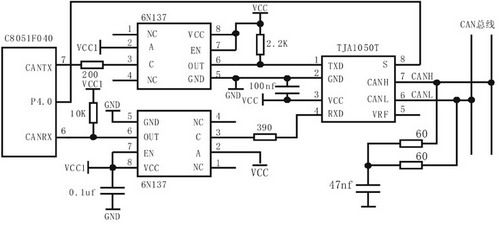 图4 智能节点硬件框图 CAN智能节点主要完成的任务是:将相关数据数传送给其它节点,同时从总线上接收本节点所需要的数据。因此智能节点的CAN通信主要包括系统初始化程序、发送程序、接收程序等。在本例中,系统软件采用结构化程序设计方案,使其具有较好的模块性和可移植性,对于不同的系统功能或不同的应用环境,可以方便地进行编程重组。 系统初始化程序 初始化程序主要完成对所有的报文对象进行初始化(一般将所有值置零),对CAN控制寄存器(CAN0CN)、位定时寄存器(BITREG)进行设置,还要对发送报文对象和接收报文对象分别进行初始化。其中,位定时寄存器的设置较为复杂,这里我们使用外部晶振为8MHz,CAN通信速率为500k/s,得到BITREG的初始值为0x2301。主程序中规定对象初始化、发送和接收初始化,最后才启动CAN处理机制(对BITREG和CAN0CN初始化),下面为CAN启动程序: void start_CAN(void){ SFPRAGE=CAN0_PAGE; //指向CAN0 页面 CAN0CN|=0x41; //将CCE和Init置“1” 开始初始化 CAN0ADR=BITREG; //指向位定时寄存器 进行配置 CAN0DAT=0x2301; //位率为500k/s CAN0CN|=0x06; //允许全局中断,IE和 SIE置位 CAN0CN &=~0x41; //清楚CCE和INIT 位,启动CAN状态机制 } 发送程序 CAN报文发送是由CAN控制器自动完成的,用户只需根据接收到的远程帧的识别符,将对应的数据转移到发送缓冲寄存器,然后将此报文对象的编码写入命令请求寄存器启动发送即可,而发送由硬件来完成。这里,我们使用定时更新发送报文对象中的数据,数据的发送有控制器自动完成,当其收到一个远程帧时,就将具有相同识别符的数据帧发送出去。其发送程序结构如下: void transmit_message(char MsgNum) { uchar i; SFRPAGE=CAN0_PAGE; //指向CAN0 页面 CAN0ADR=IF1CMDMSK; //向IF1命令 屏蔽寄存器写入命令 CAN0DAT =0x0083; //位率为500k/s CAN0ADR=IF1ARB2;//指向IF1仲裁 寄存器2 CAN0DATH |= 0x80; CAN0ADR=IF1DATA1; //指向数据 场的第一个字节 for(i=0;i<4;i++){ CAN0DATH=can_temp[ i]; //将4字节数据 写入发送缓冲器 } CAN0ADR=IF1CMDRQST; CAN0DATL=MsgNum;//将报文对象编 号写入,则数据发送到 对应的报文对象 } 接收程序 CAN报文的接收与发送一样,是由CAN控制器自动完成的,接收程序只需从接收缓存器中读取接收的数据,再进行相应的处理即可。其基本方法与发送程序一致,只是接收程序采用中断方式。在此应用中,接收程序主要接收上位机对智能节点的参数设置数据,只有当修改时才需要接收数据,所以采用中断方式处理比较合适。接收程序结构如下: void receive_data(void) { SFRPAGE=CAN0_PAGE; //指向CAN0\页面 CAN0ADR=IF2CMDMSK; //向IF2命令 屏蔽寄存器写命令 CAN0DATH =0x00; //位率为500k/s CAN0DATL =0x3F; CAN0ADR=IF2CMDRQST; //将报文对象 编号写入命令请求寄存 器,对应接收CAN0DATL=MsgNum; //得到数据就从报 文RAM中移到数据 缓冲器中 CAN0ADR=IF2DATA1; //指向数据场的 第一个字节 for(i=0;i<4;i++) {CAN_RX[ i]=CAN0DAT; //读取 4个字节数据 } } 结语 在CAN总线的开发试验过程中,经过实际测试,我们设计的基于C8051F040的CAN总线智能节点具有集成度高、性能稳定、抗电磁干扰能力强等特点。在通信波特率设置为500kbps时通信顺畅,实现了某型火控系统内部单体间通信的可靠性、实时性、灵活性。 |


网友评论