
ЛљгкAT89C52ЕФГЌЩљВЈВтОрЕЙГЕЗРзВБЈОЏЯЕЭГЩшМЦ
ЗЂВМЪБМфЃК2010-11-30 18:15
ЗЂВМепЃКdesigner
|
РћгУAT89C52ЕЅЦЌЛњзїЮЊжїПижЦЦїЃЌНсКЯГЌЩљВЈВтОрдРэЃЌЪЕЯжЕЙГЕЗРзВБЈОЏЙІФмЁЃНјааЯЕЭГгВМўКЭШэМўЕФЩшМЦЃЌМьВЈНгЪеЕчТЗКЭЮТЖШВЙГЅЕчТЗЗжБ№ВЩгУСЫCX20106AКЭDSl8820СНПюМЏГЩаОЦЌЃЌМѕаЁСЫЕчТЗМфЕФЯрЛЅИЩШХЃЌЬсИпСЫОЋЖШЁЃИУЯЕЭГЕФзюДѓВтОрЮѓВюВЛГЌЙ§1 cmЃЌВтОрЗЖЮЇЮЊ10ЁЋ300 cmЁЃСэЭтЃЌЯЕЭГЛЙОпгаНсЙЙМђЕЅЃЌЬхЛ§аЁЃЌЪЙгУЗНБуЕШЬиЕуЁЃ ЫцзХЙњУёОМУЕФИпЫйЗЂеЙЃЌЮвЙњЦћГЕЕФгЕгаСПдкДѓЗљдіМгЃЌдьГЩЕРТЗгЕЖТЃЌНЛЭЈЪТЙЪЦЕЗЂЃЌИјШЫУЧЕФЩњУќКЭВЦВњАВШЋДјРДСЫОоДѓЕФЫ№ЪЇЁЃАВШЋМнЪЛГЩЮЊДѓМвЙизЂЕФНЙЕуЃЌЦфжаЦћГЕЗРзВЯЕЭГ(Collision Avoidance SystemЃЌCAS)ЕФЩшМЦКЭашЧѓЯдЕУЗЧГЃживЊКЭЦШЧаЁЃеыЖдетжжЧщПіЃЌЩшМЦвЛжжЯьгІПьЁЂПЩППадИпЧвНЯЮЊОМУЕФЦћГЕЗРзВБЈОЏЯЕЭГЪЦдкБиааЁЃ ГЌЩљВЈзїЮЊвЛжжЦЕТЪГЌЙ§20 kHzЕФЛњаЕВЈЃЌЦфжИЯђадЧПЃЌФмСПЯћКФЛКТ§ЃЌдкНщжЪжаДЋВЅОрРыдЖЃЌвђДЫГЌЩљВЈВтОрЗЈЪЧзюГЃМћЕФвЛжжОрРыВтСПЗНЗЈЁЃРћгУГЌЩљВЈМьВтОрРыЃЌЩшМЦБШНЯЗНБуЃЌМЦЫуДІРэвВНЯМђЕЅЃЌЖјЧвОЋЖШвВНЯИпЁЃБОЩшМЦВЩгУAT89C52ЕЅЦЌЛњзїЮЊжїПиЦїЃЌНсКЯГЌЩљВЈВтОрдРэЃЌЩшМЦСЫЦћГЕЕЙГЕЗРзВБЈОЏЯЕЭГЁЃИУЯЕЭГВЩгУШэЁЂгВМўНсКЯЕФЗНЗЈЃЌОпгаФЃПщЛЏКЭЖргУЛЏЕФЬиЕуЁЃ 1 ГЌЩљВЈЕФВтОрдРэ БОЯЕЭГбЁгУЕФЪЧбЙЕчЪНГЌЩљВЈДЋИаЦїЁЃГЌЩљВЈВтОрдРэгаСНжжЗНЪНЃКЙВеёЪНКЭТіГхЗДЩфЪНЁЃвђЮЊЙВеёЪНЕФгІгУвЊЧѓИДдгЃЌдкДЫЪЙгУТіГхЗДЩфЪНЁЃГЌЩљВЈВтОрдРэШчЭМ1ЫљЪОЁЃ 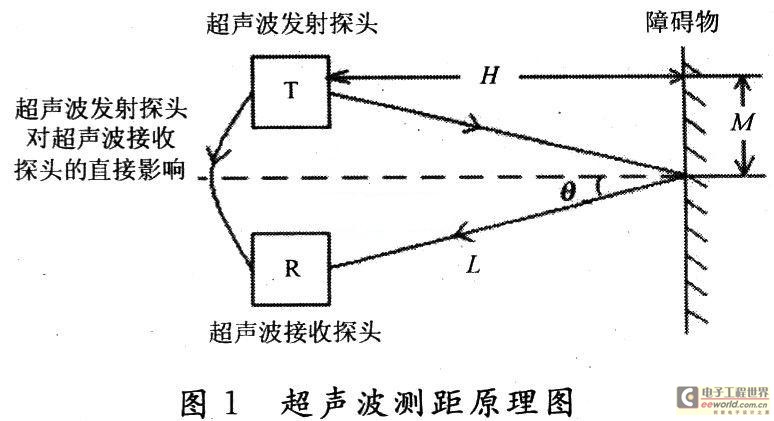 ЭМ1жаБЛВтОрРыЮЊHЃЌСНЬНЭЗжааФОрРыЕФвЛАыгУMБэЪОЃЌГЌЩљВЈЕЅГЬЫљзпЙ§ЕФОрРыгУLБэЪОЃЌгЩЭМжаЙиЯЕПЩЕУЃК 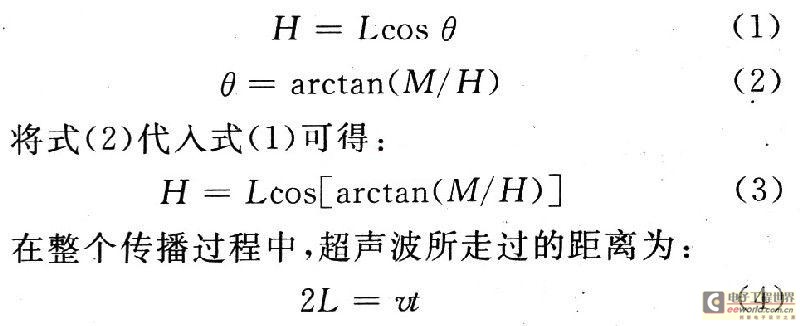 ЪНжаЃКvЮЊГЌЩљВЈЕФДЋВЅЫйЖШЃЛtЮЊДЋВЅЪБМфЃЌМДЮЊГЌЩљВЈДгЗЂЩфЕННгЪеЕФЪБМфЁЃ НЋЪН(4)ДњШыЪН(3)ПЩЕУЃК  гЩДЫПЩМћЃЌвЊЯыВтЕУОрРыHЃЌжЛвЊВтЕУГЌЩљВЈЕФДЋВЅЪБМфtМДПЩЁЃ 2 ЯЕЭГЕФЪЕЯж ИљОнЩшМЦвЊЧѓВЂзлКЯИїИіЗНУцвђЫиЃЌПЩвдВЩгУAT89C52ЕЅЦЌЛњзїЮЊжїПижЦЦїЃЌгУЖЏЬЌЩЈУшЪЕЯжLCDЪ§зжЯдЪОЃЌГЌЩљВЈЧ§ЖЏаХКХгУЕЅЦЌЛњЕФЖЈЪБЦїЭъГЩЃЌЦфОпЬхЕФЯЕЭГПђЭМШчЭМ2ЫљЪОЁЃ 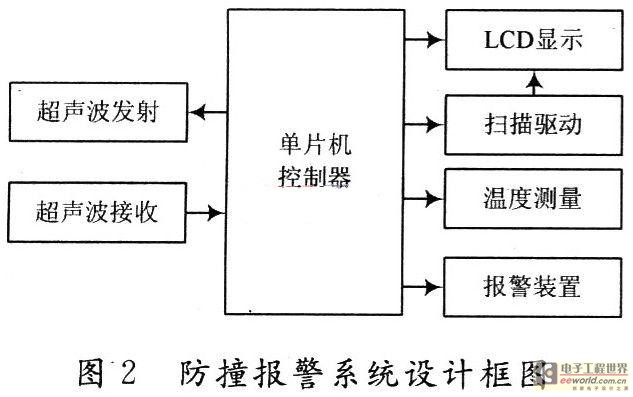 ИУЯЕЭГжївЊгЩЕЅЦЌЛњЯЕЭГМАЯдЪОЕчТЗЁЂГЌЩљВЈЗЂЩфЕчТЗКЭГЌЩљВЈМьВтНгЪеЕчТЗЕШВПЗжзщГЩЁЃВЩгУAT89C52РДЪЕЯжЖдCX20106AКьЭтНгЪеаОЦЌКЭTCT40-10ЯЕСаГЌЩљВЈзЊЛЛФЃПщЕФПижЦЁЃЦфжаГЌЩљВЈНгЪеЕчТЗЪЙгУМЏГЩЕчТЗCX2-0106AЃЌПЩгУРДЭъГЩаХКХЕФЗХДѓЁЂЯоЗљЁЂДјЭЈТЫВЈЁЂЗхжЕМьВЈКЭВЈаЮећаЮЕШЙІФмЁЃЯдЪОЦїМўВЩгУЕФЪЧLCDl2864ЯдЪОЦїЃЌВЂбЁгУD18820ЮТЖШДЋИаЦїНјааЮТЖШМьВтЃЌЪЕааЮТЖШВЙГЅЁЃжїПиЦїAT89C52ЕЅЦЌЛњЪЧвЛжжЕЭЙІКФЁЂИпадФмCMOS 8ЮЛЮЂПижЦЦїЃЌОпга8 KBЕФЯЕЭГПЩБрГЬFLASHДцДЂЦїЁЃгыAT80C51в§НХКЭжИСюЭъШЋМцШнЁЃгЕга1Иі8ЮЛCPUЃЌ1ИіЦЌФкеёЕДЦїМАЪБжгЕчТЗЃЌ3Иі16ЮЛЖЈЪБЃЏМЦЪ§ЦїЃЌ21ИіЬиЪтЙІФмМФДцЦїЃЌ4Иі8ЮЛВЂааIЃЏOПкЃЌЙВ32ЬѕПЩБрГЬIЃЏOЖЫЯпЃЌ1ИіПЩБрГЬШЋЫЋЙЄДЎааПкЃЌ8ИіжаЖЯдДЁЃ БОЩшМЦЕФЪЕЮяШчЭМ3ЫљЪОЁЃ 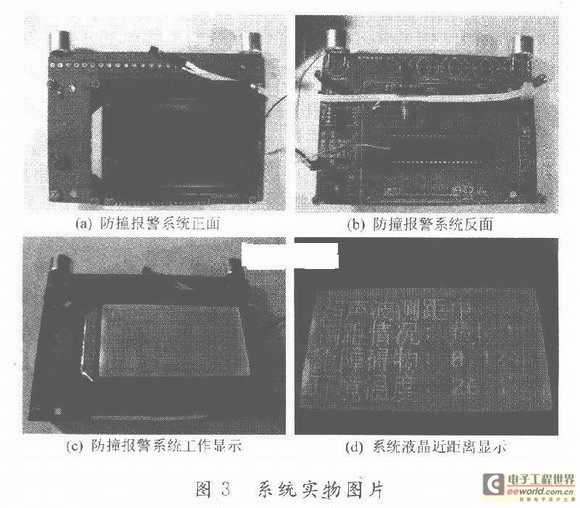 3 ЯЕЭГЕФШэМўЩшМЦ ЯЕЭГШэМўВПЗжАќРЈжїГЬађЁЂжаЖЯзгГЬађКЭЦфЫћзгГЬађЁЃжїГЬађСїГЬЭМШчЭМ4ЫљЪОЃЌЦфжажаЖЯзгГЬађЕФКЫаФДњТыШчЯТЃК 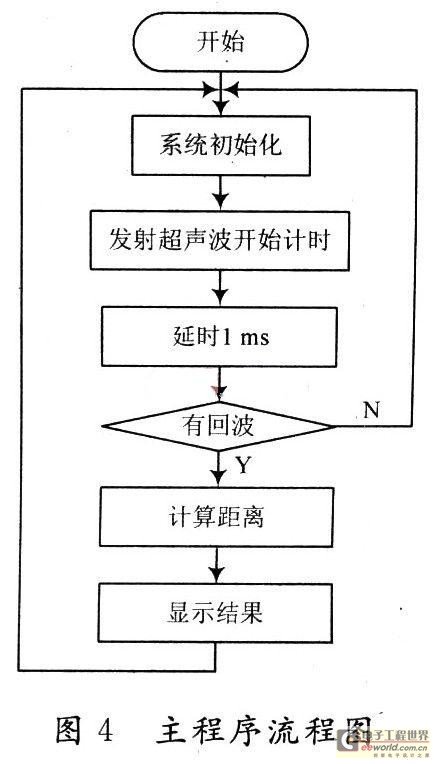 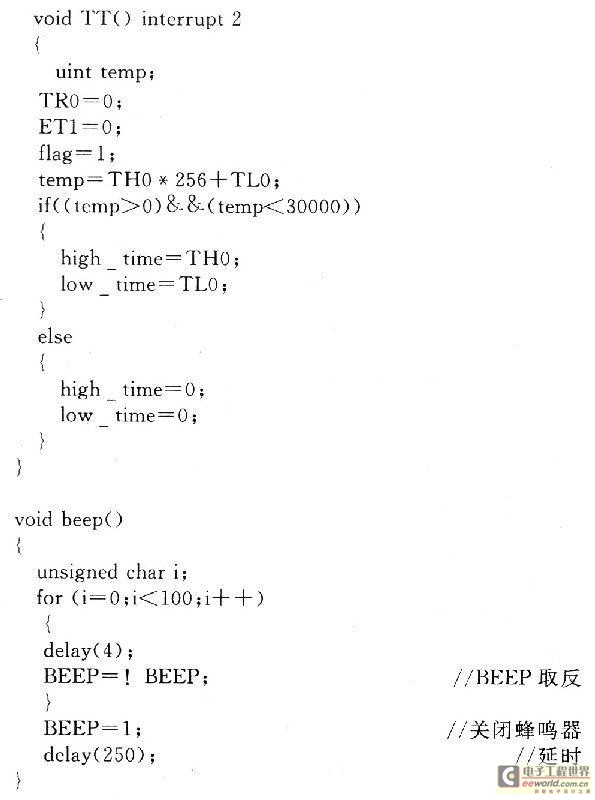 4 Нсгя ДЫЕЙГЕЗРзВБЈОЏЯЕЭГЃЌПЩвдгІгУгкЦћГЕЕЙГЕЕШГЁКЯЃЌЬсабМнЪЛдБдкЕЙГЕЪБФмгааЇЕиБмПЊПЩФмЖдЕЙГЕдьГЩЮЃКІЕФеЯАЮяКЭааШЫЁЃБОЯЕЭГеыЖдЦеБщДцдкЕФПЙИЩШХадЮЪЬтМгЧПСЫШэгВМўДІРэДыЪЉЁЃгВМўЗНУцР§ШчАбГЌЩљВЈНгЪеЕчТЗгУН№ЪєПЧЦСБЮЦ№РДЃЌЬсИпСЫЯЕЭГЕФПЙИЩШХФмСІЃЛШэМўЗНУцЯЕЭГНсКЯЪЙгУDS18820ЮТЖШДЋИаЦїЪЕЯжЮТЖШВЙГЅНУе§ЃЌЪЙЯЕЭГПЩвде§ГЃЙЄзїдкШЮКЮЮТЖШЯТЃЌЮѓВюЖМВЛЛсГЌЙ§жИЖЈЗЖЮЇЁЃВЂгУДјзжПтЙІФмЕФLCDl2864вКОЇЪЕЪБЯдЪООрРыЃЌЕБТњзуОрРыЬѕМўЪБЃЌЗфУљЦїЗфУљЙЄзїЬсЪОМнЪЛдБЃЌОпгаНЯЧПЕФЪЕгУадЃЌЧвгВМўНсЙЙМђЕЅЃЌЬхЛ§аЁЃЌЪЙгУЗНБуЁЃЕЋИУЯЕЭГЕФВтСПОрРыгаЯоЃЌжЛгадк10ЁЋ300 cmОрРыФкгааЇЃЌашвЊНјвЛВНЕФИФНјКЭЬсИпЁЃ |
ЭјгбЦРТл