
基于TMS320F2812的矢量变频调速系统研究
发布时间:2010-11-26 18:16
发布者:designer
|
现代交流传动系统中,随着矢量控制、直接转矩控制等控制方法的出现和应用,使交流传动系统的性能有了明显的改善,矢量控制技术作为交流调速的首选方案之一,近年来得到不断的完善和改进。由于矢量控制策略较复杂,由模拟或模拟数字混合的实现方案存在电路复杂、一致性差、零漂等问题,因此应用高性能的数字信号处理器组成数字化矢量控制系统是目前热点研究方向。TMS320F2812是一款专为电机控制而设计的最新的32位定点DSP芯片,由于它具有成本低、功耗小、数据处理能力强、程序存储量大、运算速度快等特点,且与现有的24x/240x系列DSP控制芯片代码兼容,因此成为现代交流调速控制系统的首选芯片。本文首先建立了按转子磁场定向的异步电机矢量控制系统的模型,并利用TMS320LF2812DSP为核心控制芯片设计了一套矢量变频调速系统,构建了该系统的实验平台,给出了系统的硬件和软件组成方案,并进行了实验,给出了实验结果,实验结果表明了整个控制方案的可行性及系统的稳定性。 1 系统的数学模型及控制原理 1.1 交流异步电动机数学模型 为了分析方便,先对三相异步电机做如下理想化假定:1)、电机定转子三相绕组完全对称;2)、定转子表面光滑,无齿槽效应,定转子每相气隙磁动势在空间呈正弦分布;3)、磁饱和、涡流及铁心损耗忽略不计。 在以上条件下,经过从静止到旋转坐标系的变换,得到转子磁场定向控制方程式如下: 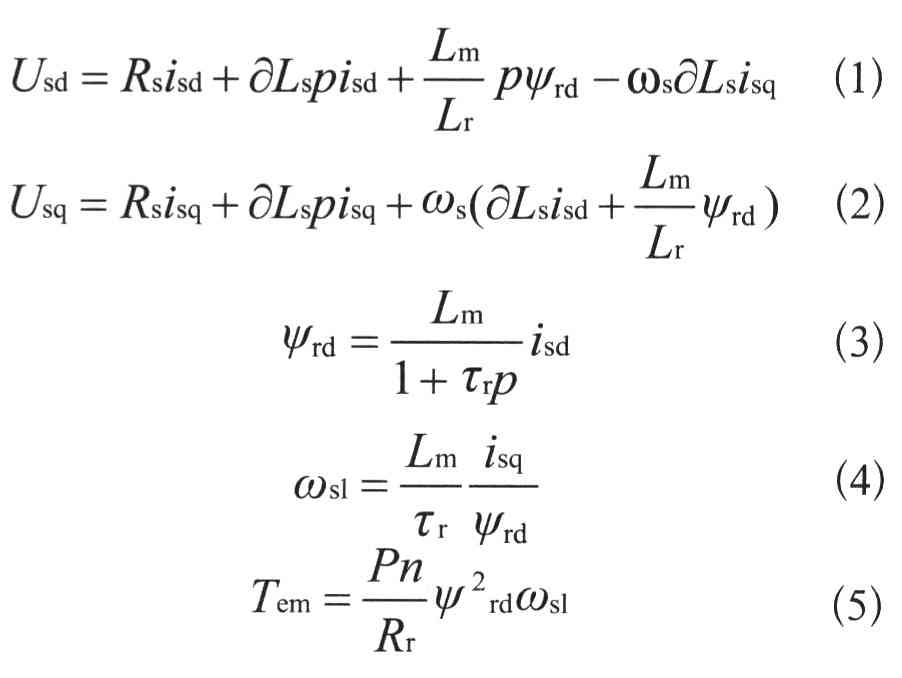 其中: 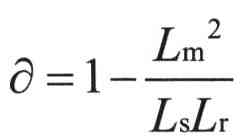 为漏磁系数,τr为转子时间常数,Rs、Rr为电机定转子电阻;Ls、Lr、Lm分别为定转子自感和互感;p是微分算子;Usd、Usq是定子电压在dq轴上的分量;isd、isq是定子电流在dq轴上的分量;ψsd、ψsq是定子磁链在dq轴上的分量。 1.2 交流异步电动机转子磁场控制原理 图1是异步电机转子磁场定向控制原理框图。利用空间矢量分析法,采用磁场定向将定子电流进行CLARK变换和PARK变换(矢量变换),得到在dq坐标系下的励磁反馈电流isd和转矩反馈电流isq,与给定励磁电流isdref和转矩电流isqref比较,再经过PARK逆变换输出在αβ坐标下的电压,用来决定空间矢量的PWM波形输出;速度反馈一方面用于与给定速度比较产生isqref,另一方面进入电流模型决定磁链的位置,并用于PARK和CLARK逆变换。通过采样电机三相电流,经过坐标变换转换到转子的同步坐标下,再经过电流环PI调节出适当的电压矢量,经过空间矢量发生器后去控制三相逆变器。这里在进行坐标变换时需要知道转子轴的位置,即图1中的角θ,它可根据(3)、(4)式通过定子电流矢量和电机转子时间常数来获得这一角度。 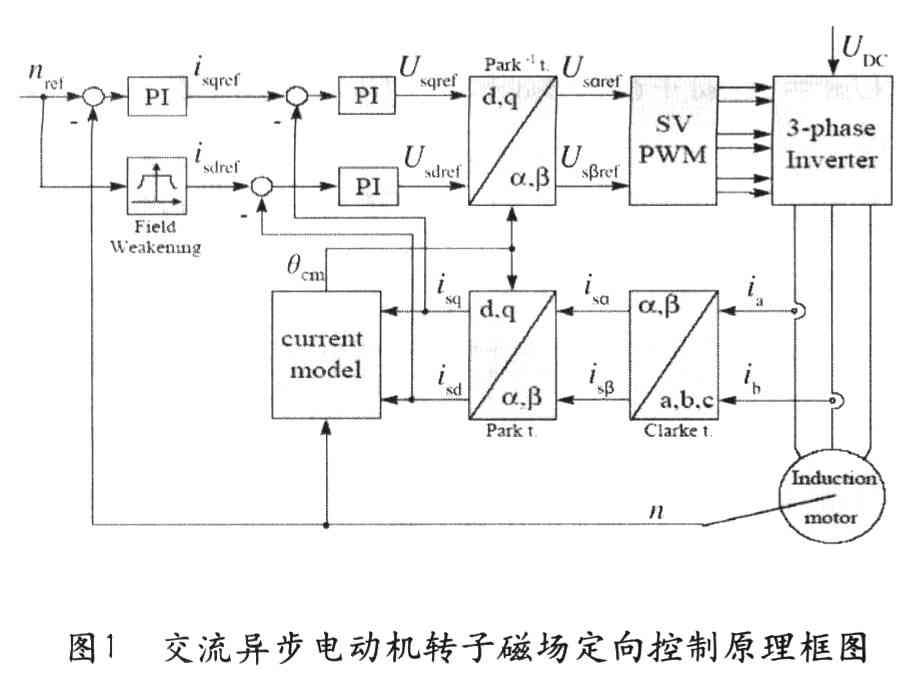 2 系统的组成及硬件和软件设计 2.1 系统的硬件构成: 图2是由TMS320F2812作为控制芯片的电机矢量控制系统硬件结构框图,整个系统由DSP作为主要控制元件的控制电路、用增量式光电编码器、霍尔传感器等组成的信号检测电路、驱动隔离和保护电路等几大部分组成;系统主电路采用交一直一交电压型变频器,主电路分为不控整流和逆变两部分,电感和电解电容构成低通滤波器对三相不控整流的输出进行滤波,为后级的逆变环节提供稳定的直流母线电压。滤波电感和滤波电容的值都取得较大以减小电压纹波。逆变部分选用了三菱智能IPM模块PM30CSJ060,该模块包含了由六个IGBT、六个续流二极管、栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路。模块的主电路共有5个端子,P和N为直流电源输入正端和负端,U,V,W为三相逆变器输出端。控制部分包括PWM信号输入,过流、欠压、过压等故障信号以及驱动电源等,其中DSP生成的PWM信号需通过光耦合器隔离后输入。上臂三个单管分别使用三个独立的电源进行控制,三个下管则共用一个电源,光耦输入有驱动电流时,光耦隔离器件导通,这时IPM控制输入为低电平,其控制的IGBT、导通,当光耦输入无驱动电流或驱动电流不够大时,光耦隔离器件不导通,这时IPM控制的输入为高电平,其控制的IGBT不导通。Up、Vp、Wp是与变频器直流输入正端P相接的各开关管控制输入端,Ufo,Vfo,Wfo是模块内部各个开关管的保护输出端,Un、Vn、Wn则是与变频器直流输入负端N相接的各管的控制输入端,FO是它们共同的保护输出端。PM30CSJ060的自保护电路中,任何一相保护电路动作,将产生一低电平,而且各相保护电路的故障信号(如过流、过压、欠压等)输出相与,所得信号送入DSP的PDPINT中断口(低电平有效),当DSP收到低电平信号时,作出中断处理,封锁PWM输出。 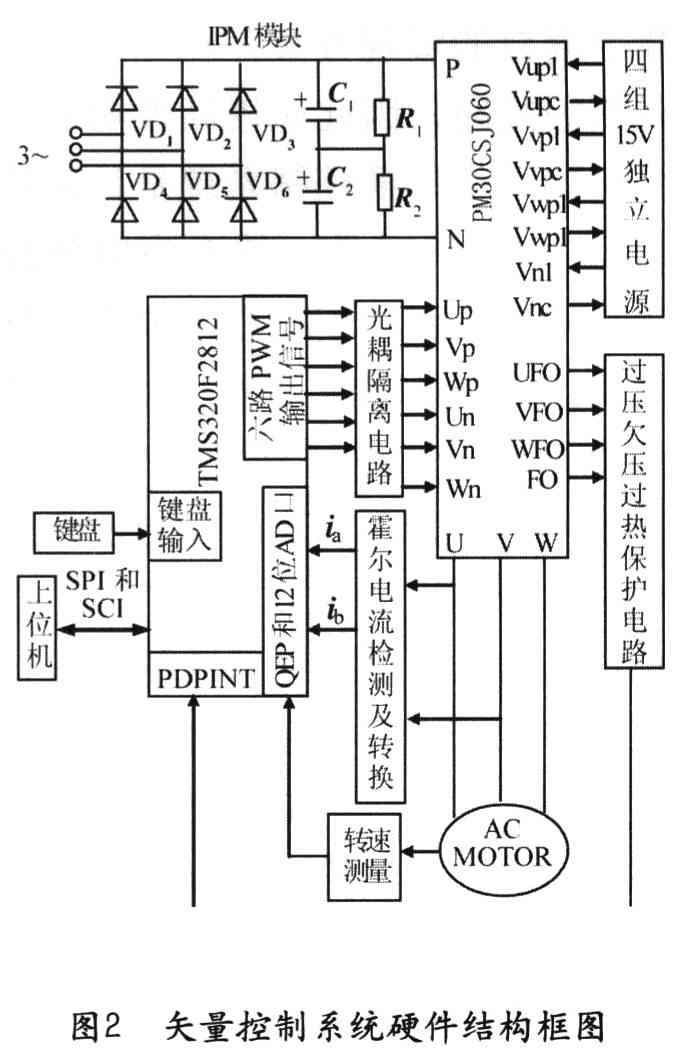 Vupl一Vupc,Vvpl一Vvpc,Vwpl—Vwpc,Vnl—Vnc所加的电压范围为13.5V~16.5V,本系统采用典型的电压值15V;加在PN端子上的电压范围为0~380V。 2.2 TMS320F2812芯片简介及由它组成的控制模块 TMS320F2812是控制电路的核心,为一款最新的电机控制专用DSP芯片,它是TI公司在TMS320C2000平台上使用32位内核的DSP,运行速度可达150MIPS,实时处理能力强,能应用于很多复杂的控制算法;高性能低功率,采用1.8V内核电压和3.3V外围接口电压;片上有128kFlash和1 8k内部Saram,可外扩1M的统一编址存储器,应用起来更加灵活方便、快速;两个事件管理模块为电机控制提供了良好的控制功能;另外还有16路12bitA/D可灵活设置采样方式;拥有两个SCI口和一个SPI口,增加了数据缓存能力,传输频率可达MHz量级;串行通讯模块还包括增强的eCAN总线和新增的McBSP,能满足多种通讯的需要,这些可省去复杂的外围电路,提高了系统的集成度和可靠性。 系统的电流检测电路如图3示,由于电机绕组是对称的,因此只检测两相电流ia和ib,本系统是采用霍尔传感器来检测电机电流ia和ib的。图3为ia相电流检测电路,由图可见,先将电流霍尔检测到的电流ia经过信号比例放大,全波整流,输出供TMS320F2812的A/D口的ADCINl(ib的测量送入ADCIN2)进行采样,将模拟量转换成数字量,然后进行相应处理。TMS320F2812的A/D模块具有l 2位精度,这为提高系统的控制精度创造了条件,其电流采样的分辨率达到1/290。 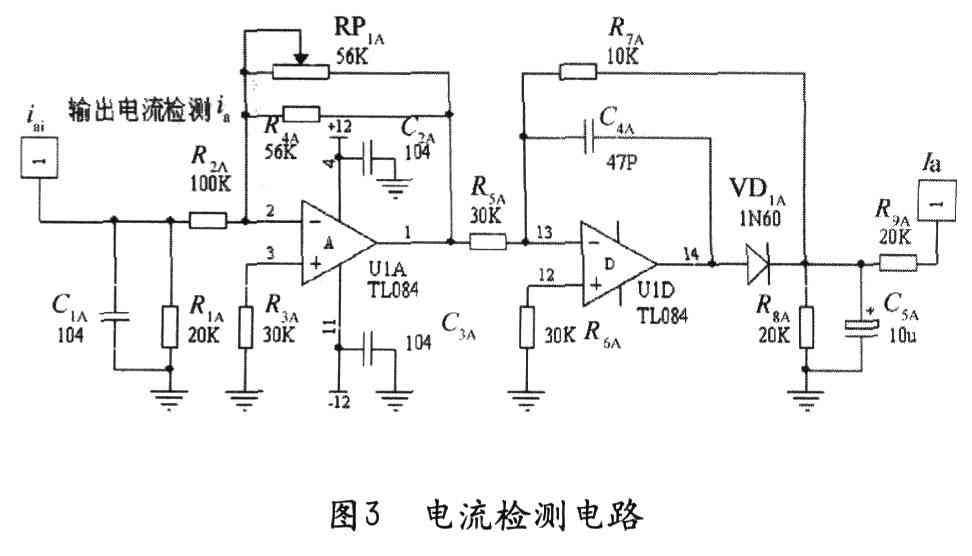 在保护部分中,虽然IPM模块已经设有过压、欠压、过流、过热等保护,但是为了提高系统的安全可靠性及更好的保护IGBT管,我们还设置一套快速而准确的保护环节以防止各种故障,本环节保护电路的故障信号均输出相与,所得信号送入DSP的PDPINT中断口,当该口收到的电平信号后,DSP将做出相应的中断处理,立即封锁PWM输出及停止运行。 2.3 系统软件设计 系统的软件主要包括主程序与中断服务子程序,主程序主要完成的功能是芯片的初始化、变量的定义以及初始化;各种特殊功能模块的初始化,如通讯接口、输入输出口、时间管理器、AD转换的初始化;系统的启动、停机的控制等。中断子程序的是整个控制的主要部分,主要采用了事件管理器的Tl下溢中断,在每个中断周期内,要完成各种采样信号的AD转换,电路的PI调节控制,逆变电路开关管的输出占空比的在线实时计算,以及各种软件的保护功能的实现。子程序包括:速度测量子程序,光电编码脉冲计数子程序,模相电流检测子程序,电流环和速度环的数字PI调节子程序,PARK变换和逆变换子程序,CLARKE变换子程序,空间矢量产生和PWM波形发生子程序等。图4是速度PI调节程序流程图,图5是PWM定时中断子程序流程图。 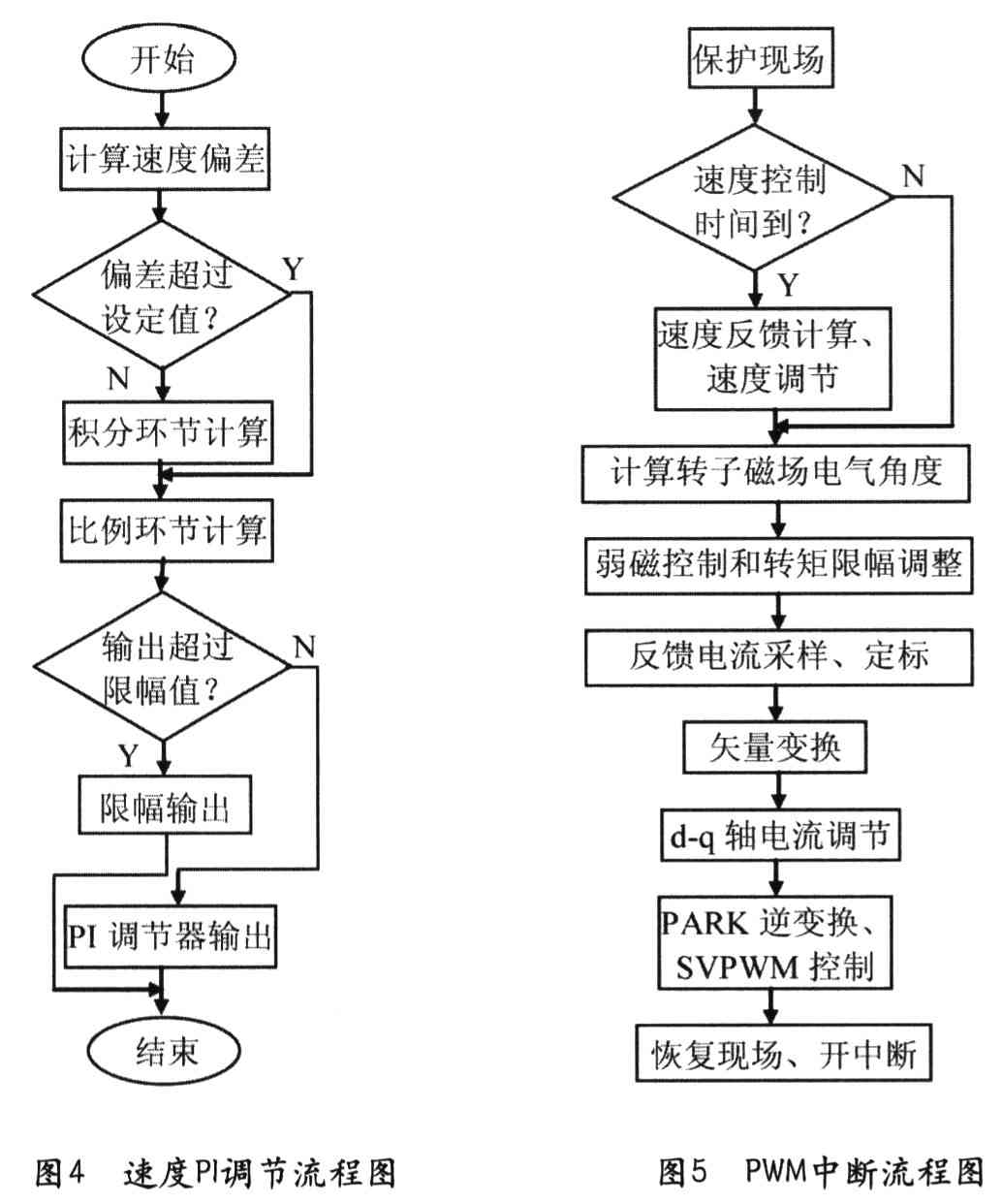 3 实验结果 根据上述对主电路,控制电路等各个部分设计,应用TMS320F2812为主控芯片搭建了实验系统,本实验采用鼠笼式异步电动机,其参数如下:额定转速1440r/min,频率50Hz,额定电压:380V,额定电流:8.8A;异步电动机带的是同轴的他励直流发电机,其参数如下:额定转速1450r/min,额定电压:230V,额定励磁电压:220V,额定励磁电流:0.79A。SVPWM的开关频率设为10kHz,死区时间不小于2.5μs。电流环的参数整定为:kp=4.5,ki=12,转速环的参数整定为:kp=60,ki=0.8,实验波形采用数字示波器测量得到,电流波形每100mV代表电流值是1A,转速波形每1V代表的转速是400转/分钟。 图6是空载启动时定子电流和转速曲线的波形(图中:定子电流:横轴:250ms/格,纵轴:2A/格;转速:横轴:250ms/格,纵轴:400转/分/格),启动时间大约需1.25秒钟,启动电流比稳态时大2倍。 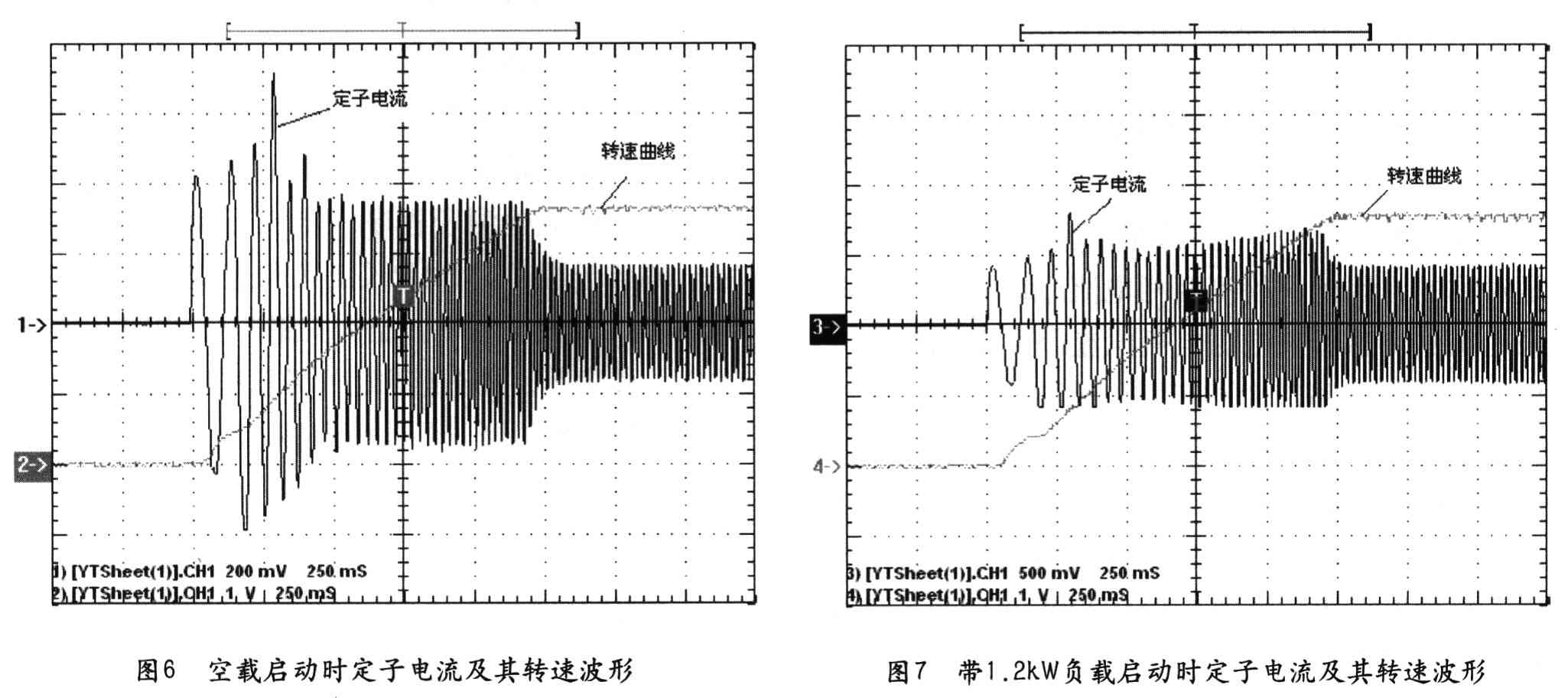 图7是直流发电机带63Ω的电阻负载时(异步电动机带的负载功率是1.2kW左右)启动过程的电流和转速波形(定子电流:横轴:250ms/格,纵轴:5A/格;转速:横轴:250ms/格,纵轴:400转/分/格),在带负载的情况下,电机的启动时间也是1.25秒钟,启动过程中启动电流比稳态时的电流值稍大但小于是2倍,说明随着负载功率的加大,启动电流和稳态电流越接近。 4 结论 矢量控制系统具有高的动静态性能,但其控制的实时运算量大,运用DSP芯片作为主控芯片可有效地解决实际矢量控制实现时运算量大而引起的实时性问题,而TMS320F2812作为一种新型DSP芯片,在电机控制领域有着优异的性能,获得了越来越多的应用。本文以TMS320F2812和PM30CSJ060为核心组成的矢量控制变频调速系统,系统硬件结构简单,实验表明系统稳定可靠,故障保护快,动态性能好,控制精度高,是一种理想的矢量控制实现方案。 |
网友评论