
ЛљгкATmega48ЕФШ§ЯрЮоЫЂЕчЛњПижЦЗНЗЈ
ЗЂВМЪБМфЃК2010-11-4 12:21
ЗЂВМепЃКeetech
|
1 в§бд ЮоЫЂжБСїЕчЛњвдЦфжиСПЧсЃЌЬхЛ§аЁЃЌМгЫйадФмКУЃЌдЫааЦНЮШЃЌдывєЕЭЕШгХЕуЖјЙуЗКгУгкЖЁвЕКЭУёгУВњЦЗжаЁЃЮоЫЂжБСїЕчЛњЕФЙІТЪвђЪ§ИпЃЌЮозЊзгЫ№КФЃЌЦфзЊзгзЊЫйФмбЯИёЕигыЕчдДЦЕТЪБЃГжЭЌВНЁЃзЊзгДХГЁгЩгРОУДХЬњВњЩњЁЃЭЈГЃЃЌВЩгУЕчбЙдДаЭТіПэЕїжЦ(PWM)ПижЦзїЮЊЮоЫЂжБСїЕчЛњЕїЫйЯЕЭГгУЕФЧ§ЖЏЦїЁЃНќФъРДЃЌЙњЭтЗзЗзЭЦГівдЕЅЦЌЛњ(MCU)ЮЊКЫаФЕФЕЅЦЌЕчЛњПижЦЦїЃЌЫќФЯвЛИіMCUдйХфБИЭтЮЇЧ§ЖЏЕчТЗЙЙГЩЃЌФмДѓДѓНЕЕЭГЩБОЃЌЫѕаЁЬхЛ§ЃЌНєДеНсЙЙЃЌЬсИпПЩППадЁЃдкДЫЃЌНщЩмrВЩгУAtmega48ЕЅЦЌЛњЪЕЯжШ§ЯрЮоЫЂжБСїЕчЛњПижЦЦїЕФЗНЗЈЁЃ 2 ATmega48ЕЅЦЌЛњ ATmega48ЕЅЦЌЛњЪЧAtmelЙЋЫОЛљгкздЖЏЕчбЙЕїећЦї(Automatic Voltage RegulatorЃЌМђГЦAVR)діЧПаЭОЋМђжИСюМЏМЦЫуЛњ(RISC)НсЙЙЕФЕЭЙІКФ8ЮЛCMOSЮЂПижЦЦїЁЃОпгаЯШНјЕФжИСюМЏМАЕЅЪБжгжмЦкжИСюжДааЪБМфЃЌЦфЪ§ОнЭЬЭТТЪПЩвдДяЕН1 MIPS/MHzЁЃAVRФкКЫОпгаЗсИЛЕФжИСюМЏКЭ32ИіЭЈгУЙЄзїМФДцЦїЁЃетаЉМФДцЦїЖМжБНггыЫуЪѕТпМЕЅдЊ(ALU)ЯрСЌНгЃЎПЩдквЛИіЪБжгжмЦкФкЭЈЙ§вЛЬѕжИСюЭЌЪБЗУЮЪСНИіЖРСЂЕФМФДцЦїЃЌвђДЫПЩЬсИпДњТыаЇТЪЁЃ ATmega48ЕФгВМўзЪдДгаЃК4 KBЕФЯЕЭГФкПЩБрГЬFlashЃК256зжНкЕФEEPROMЃК512зжНкЕФSRAMЃЛ23ИіЭЈгУIЃЏ0ПкЯпЃЛ32ИіЭЈгУЙЄзїМФДцЦїЃЛ2ИіДјЖРСЂдЄЗжЦЕЦїКЭБШНЯЦїЕФ8ЮЛЖЈЪБЦїЃЏМЦЪ§ЦїЃЛ1ИіДјдЄЗжЦЕЦїЁЂБШНЯЦїКЭВЖзНЙІФмЕФ16ЮЛЖЈЪБЦї/МЦЪ§ЦїЃЛДјЖРСЂеёЕДЦїЕФЪЕЪБМЦЪ§ЦїЃЛ6ИіЭЈЕРPwMЃЛ8ТЗ10ЮЛAЃЏDзЊЛЛЦїЃЛ6ТЗ10ЮЛAЃЏDзЊЛЛЦїЃЛПЩБрГЬЕФДЎааUSARTНгПкЃЛПЩЙЄзїгкжїЛњЃЏДгЛњФЃЪНЕФSPIДЎааНгПкЃЛУцЯђзжНкЕФ2ЯпДЎааНгПкЃЛЖРСЂЦЌФкеёЕДЦїЕФПЩБрГЬПДУХЙЗЖЈЪБЦїЃЛЦЌФкФЃФтБШНЯЦїМА5жжПЩЭЈЙ§ШэМўбЁдёЕФЪЁЕчФЃЪНЁЃATmega48ОпгаЗсИЛЕФIЃЏ0ПкЁЂAЃЏDзЊЛЛЦїЁЂЖЈЪБЦїЃЏМЦЪ§ЦїЁЂPWMЭЈЕРЕШзЪдДЃЌЮЊЪЕЯжШ§ЯрЮоЫЂжБСїЕчЛњЕФПижЦЁЂЛЛЯрМьВтЕШЬсЙЉСЫЗНБуЁЃ 3 Ш§ЯрЮоЫЂЕчЛњЕФПижЦЪЕЯжЗНЗЈ ЭМ1ЪОГіВЩгУATmega48ЕЅЦЌЛњЪЕЯжШ§ЯрЮоЫЂЕчЛњПижЦЦїЕФдРэЭМЁЃЭМжаЃЌPC0ЁЂPCIКЭPC2ЮЊЪфШыЃЌгУвдНгЪеРДздЕчЛњUЃЌVЃЌWЛЛЯрЕФЛєЖћДЋИаЦїМьВтаХКХЃЛPD5КЭPD6гУгкПижЦЕчЛњUЯрЕФЙІТЪЧ§ЖЏЦїМўЃЛPBlКЭPB2гУгкПижЦЕчЛњVЯрЕФЙІТЪЧ§ЖЏЦїМўЃЛPD3КЭPB3гУгкПижЦЕчЛњWЯрЕФЙІТЪЧ§ЖЏЦїМўЃЛPC3ЮЊЕчЛњИјЖЈзЊЫйЕФЪфШыЕчбЙЁЃ 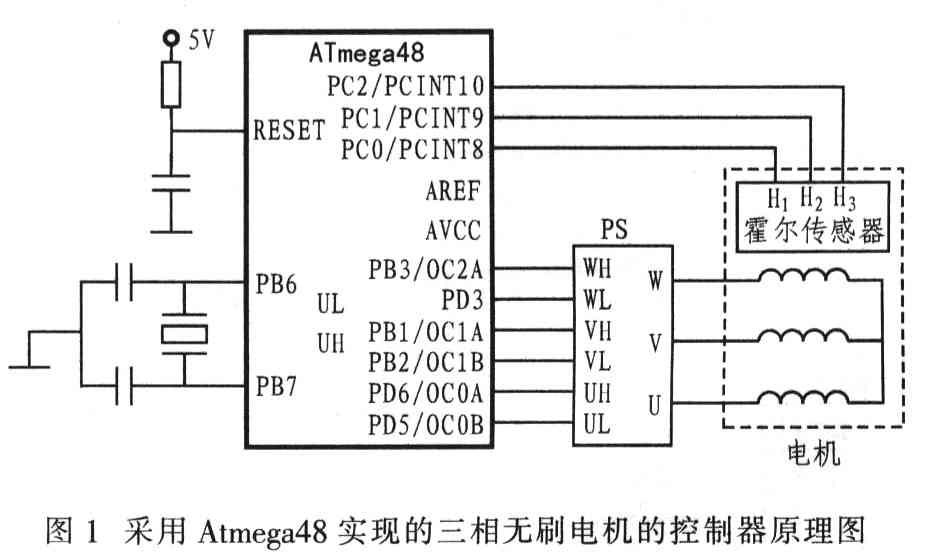 зїЮЊвЛжжЭЌВНЕчЛњЃЌжБСїЮоЫЂЕчЛњЕФзЊзгзЊЫйЪмЖЈзга§зЊДХГЁЫйЖШМАзЊзгМЋЪ§ЕФгАЯьЁЃЕБзЊзгЕФМЋЪ§ЙЬЖЈЪБЃЌжЛвЊИФБфЖЈзгЕФа§зЊДХГЁЦЕТЪЃЌМДПЩИФБфзЊзгЕФзЊЫйЁЃжБСїЮоЫЂЕчЛњЪЧвЛжжПижЦЖЈзгЕФа§зЊДХГЁЦЕТЪЃЌВЂНЋЕчЛњзЊзгзЊЫйЛиРЁПижЦжааФНјааЗДИДаЃе§ЃЎвдДяЕННгНќжБСїЕчЛњЕФЬиадЁЃЕБИКдиБфЛЏЪБЃЌЫќФмдкЖюЖЈИКдиЗЖЮЇФкПижЦЕчЛњЕФзЊзгЮЌГжвЛЖЈЕФзЊЫйЁЃ ЭМ2ИјГігУгкЭМ1жаЕФЙІТЪЧ§ЖЏЕчТЗЁЃИУЧ§ЖЏВПЗжгЩЩЯБлVQlЃЌVQ3ЃЌVQ5КЭЯТБлVQ2ЃЌVQ4ЃЌVQ6ЕФ6ИіЙІТЪОЇЬхЙмзщГЩЃЌгУгкСЌНгЕчЛњзїЮЊПижЦСїОЕчЛњШЦзщЕФПЊЙиЁЃПижЦВПЗжЬсЙЉPWMЃЌгУгкОіЖЈЙІТЪОЇЬхЙмПЊЙиЦЕТЪМАЛЛЯрЕФЪБПЬЁЃдкПижЦжБСїЮоЫЂЕчЛњзЊЫйЪБЃЎЭЈГЃЯЃЭћдкИКдиБфЛЏЪБвВФмЪЙЕчЛњзЊЫйЮШЖЈдкЩшЖЈжЕФкЃЌЖјВЛЗЂЩњЬЋДѓЕФВЈЖЏЁЃвђДЫЃЌдкЮоЫЂЕчЛњФкВПЩшжУЛєЖћДЋИаЦїЃЎвдИагІДХГЁБфЛЏЃЌИУДЋИаЦїМШПЩзїЮЊЕчЛњзЊЫйжаБеЛЗПижЦЕФЫйЖШЗДРЁВПМўЃЌвВПЩзїЮЊЯрађПижЦЕФвРОнЁЃ 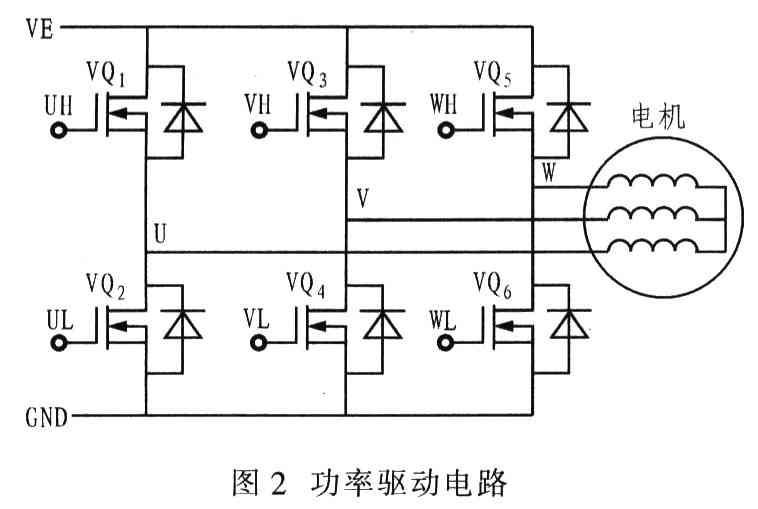 ЕБПижЦЦїЙЄзїЪБЃЌПЩИљОнЛєЖћДЋИаЦїМьВтЕНЕчЛњзЊзгЕФЕБЧАЮЛжУЃЌвРееЖЈзгШЦзщОіЖЈПЊЦєЛђЙиБеЙІТЪОЇЬхЙмЕФЫГађЃЌЪЙЕчСївРађСїОЕчЛњЯпШЦзщЃЌвдВњЩњЫГЯђЛђФцЯђЕФа§зЊДХГЁЃЌВЂгызЊзгЕФДХЬњЯрЛЅзїгУЃЌЪЙЕчЛњЫГЪБЛђФцЪБзЊЖЏЁЃЕБЕчЛњзЊзгзЊЖЏЕНЛєЖћДЋИаЦїМьВтГіСэвЛзщаХКХЕФЮЛжУЪБЃЌдйПЊЦєЯТвЛзщЙІТЪОЇЬхЙмЃЌШчДЫбЛЗЃЌЕчЛњОЭФмвРОнЭЌвЛЗНЯђМЬајзЊЖЏЃЌжБЕНПижЦЦїОіЖЈЪЙЕчЛњзЊзгЭЃжЙЪБЃЌдђЙиБеЙІТЪОЇЬхЙмЃЛОіЖЈЪЙЕчЛњзЊзгЗДЯђЪБЃЌдђПЊЦєЙІТЪОЇЬхЙмЃЌЕЋЫГађЯрЗДЁЃPWMЪЧОіЖЈЕчЛњзЊЫйПьЛђТ§ЕФЗНЪНЃЌШчКЮВњЩњPWMЪЧЪЕЯжзМШЗПижЦЫйЖШЕФКЫаФЁЃ ЭМ2жаЕФПЊЙиЦїМўВЩгУMOSFETЃЌЫќУЧЪЧВЛФмдкЙиЖЯЫВМфЧаЛЛЕФЁЃШчЙћUHКЭULЪЧЗДЯђаХКХЃЌФЧУДЃЌдкЭЌвЛЪБПЬЃЌвЛИіПЊЙиЦїМўЕМЭЈЃЌСэЭтвЛИіПЊЙиЦїМўНижЙЁЃдкетЖЮЙ§ЖЩЪБЦкЃЌЛсгавЛИіЖЬднЕФЪБМфЃЌЦфжавЛИіПЊЙиЦїМўВЂЮДЭъШЋНижЙЃЌЖјСэвЛИівВЪЧЕМЭЈЕФЃЌетбљЛсЪЙЕчдДгыЕижБНгСЌНгЃЌЪЙЕУДѓЕчСїСїООЇЬхЙмЁЃдкЙЄГЬгІгУжаБиаыБмУтетжжЧщПіЃЌвђЮЊШєЕчТЗжаУЛгаБивЊЕФгВМўБЃЛЄЃЌМЋгаПЩФмЫ№ЛЕЧ§ЖЏзАжУЁЃвђДЫЃЌдкПижЦЕчТЗжаЃЌУПИіPWMЙ§ЖЩЦкЖМгІдіМгЫРЧјЪБМфЁЃвЊЧѓдквЛИіКмаЁЕФЪБМфФкЃЌЩЯБлПЊЙиКЭЯТБлПЊЙиЖМВЛЕМЭЈЃЌМДВњЩњДјЫРЧјЕФPWMаХКХЁЃ ЭМ3ЪОГіВЩгУATmega48аЮГЩДјЫРЧјЪБМфЕФPWMаХКХдРэЁЃATmega48жаЖЈЪБЦїЃЏМЦЪ§ЦїЕФЫЋаБТЪФЃЪНПЩВњЩњДјЫРЧјЪБМфЕФPWMаХКХЃЌЫќФмВњЩњвЛИіЙигкB0TTOMЖдГЦЕФВЈаЮЁЃЭМ3жаШ§НЧЯпБэЪОЫЋаБТЪЯрЮЛаое§ФЃЪНЯТЖЈЪБЦїЃЏМЦЪ§ЦїT0ЕФМЦЪ§жЕЁЃдкЯђЩЯМЦЪ§ЪБЃЌЕБМЦЪ§жЕгыУЛЖЈжЕЦЅХфЪБЃЌЪфГів§НХOCOAЧх0ЃЛдкЯђЯТМЦЪ§ЪБЃЌЕБМЦЪ§жЕгыЩшЖЈжЕЦЅХфЪБЃЌЪфГів§НХOCOAжУlЁЃЪфГів§НХOCOBвВВЩгУЭЌбљЕФЩшжУЁЃPWMеМПеБШдђЭЈЙ§ЪфГіБШНЯМФДцЦїOCROAКЭЪфГіБШНЯМФДцЦїOCROBРДЩшжУЃЛAЃЌBСНТЗPWMЯрЮЛЕФЪфГіЯрЗДЁЃЕБЩшжУЕФСНИіЪфmЖЫБШНЯжЕЯрЭЌЪБЃЌетСНИіPWMЕФЪфГіЛЅВЙЁЃ 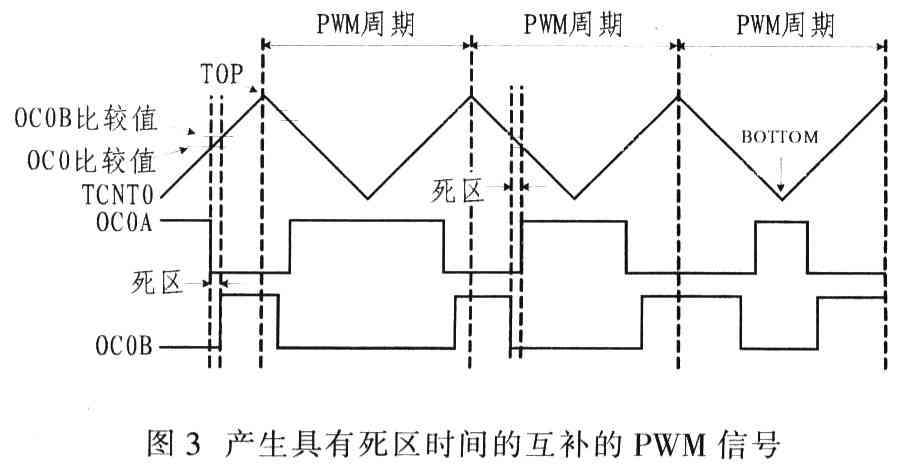 ЮЊСЫдкЩЯБлПЊЙигыЯТБлПЊЙиЧаЛЛЪБВхШыЫРЧјЪБМфЃЌБиаыИФБф0CROBКЭOCROAЕФБШНЯжЕЃЌСНепжЎВюжЕЮЊВхШыЕФЫРЧјЪБМфЁЃШчЙћ3ИіМЦЪБЃЏМЦЪ§ЦїЖМВЩгУЭЌбљЕФЩшжУЃЌОЭПЩВњЩњ3ЖдДјЫРЧјЕФPWMВЈаЮЃЌЕЋБиаыБЃжЄPWMЕФЪфГіЪЧЭЌВНЕФЁЃЕБВЩгУ8ЮЛЖЈЪБЦїЃЏМЦЪ§ЦїВњЩњ2ТЗОпгаВЛЭЌБШНЯжЕЕФPWMаХКХЪБЃЌЦфзюДѓЩшЖЈжЕЮЊ255ЁЃШєВЩгУ16ЮЛЖЈЪБЦїЃЏМЦЪ§ЦїЃЌдђБиаыЩшЖЈЮЊ8ЮЛЯрЮЛаое§PWMФЃЪНЁЃДЫЪБЃЌPWMЕФЛљБОЦЕТЪПЩгЩЯТЪНШЗЖЈЃК  ЪНжаЃКfCPUЮЊCPUЕФЦЕТЪЁЃ ЮоЫЂжБСїЕчЛњГЃВЩгУШ§Яре§ЯвЧ§ЖЏЗНЪНЁЃГЃгУЕФЗНЗЈЪЧАбвЛИіе§ЯвВЈаЮЪ§ОнДцДЂдкДцДЂЦїжаЃЌЭЈЙ§ГЬађВщБэЪфГіЫљашЕФе§ЯвЧ§ЖЏаХКХЁЃгЩгк3Иіе§ЯвЕчбЙжЎМфЕФЯрЮЛВюЮЊ120ЁуЃЌвђДЫПЩвдВЩгУвЛИіе§ЯвВЈаЮвЦЮЛВњЩњЫљгаЕФе§ЯвЧ§ЖЏаХКХЁЃЭМ4ИјГіИїЯрЧ§ЖЏаХКХЕФВњЩњЛњжЦКЭЛЛЯрЪБађЁЃЭМжаHlЃЌH2ЃЌH3ЮЊЛєЖћДЋИаЦїЕФЪфГізДЬЌЃЛS1ЁЋS6ЮЊВЈаЮВњЩњЕФВНжшЃЛащЯпЮЊЯрЮЛЧаЛЛВЈаЮЃЛЪЕЯпЮЊЪфГіЕФе§ЯвЧ§ЖЏаХКХЁЃЭМ5ИјГігУгкПижЦЦїЕФЛЛЯрПижЦГЬађЩшМЦСїГЬЁЃ 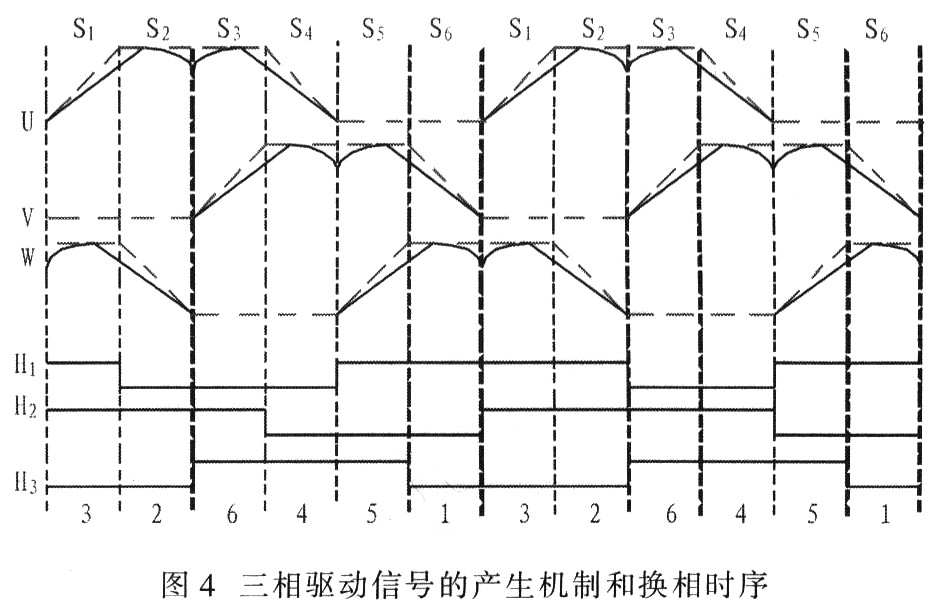 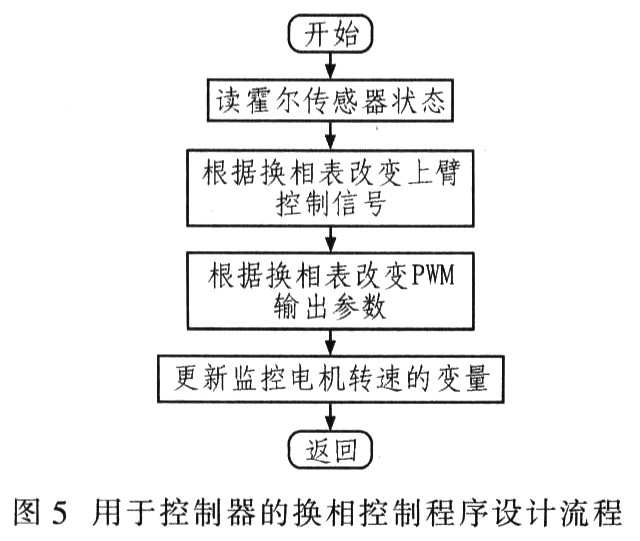 4 Нсгя ЮоЫЂжБСїЕчЛњЕФЙІТЪвђЪ§ИпЃЌгжЮозЊзгЫ№КФЃЌвђДЫгУгкЮоЫЂжБСїЕчЛњЕїЫйЯЕЭГЕФЧ§ЖЏЦїДѓЖМВЩгУЕчбЙдДаЭPWMПижЦЁЃгЩгкШ§ЯрЮоЫЂжБСїЕчЛњНшжњATmega48ЕЅЦЌЛњНјааПижЦЃЎЧвЭЈЙ§ШэМўЪЕЯжСЫДјЫРЧјЕФPWMЁЂЛєЖћДЋИаЦїЕФЛЛЯрДІРэЁЂе§ЯвЧ§ЖЏаХКХЕФВњЩњКЭЕчЛњЕФзЊЫйПижЦЃЌвђЖјЫљашЕФЭтЮЇЦїМўЩйЃЌГЩБОЕЭЃЌВЂЧвЛЙПЩЬсИпЯЕЭГЕФПЩППадЁЃ |



ЭјгбЦРТл