
开关电源的建模和环路补偿设计(2):环路补偿设计实例
发布时间:2015-6-9 14:18
发布者:designapp
|
电源环路补偿设计常常被看作是一项艰难的任务,对经验不足的电源设计师尤其如此。在实际补偿设计中,为了调整补偿组件的值,常常需要进行无数次迭代。对于一个复杂系统而言,这不仅耗费大量时间,而且也不够准确,因为这类系统的电源带宽和稳定性裕度可能受到几种因素的影响。本应用指南针对开关模式电源及其环路补偿设计,说明了小信号建模的基本概念和方法。本文以降压型转换器作为典型例子,但是这些概念也能适用于其他拓扑。 电流模式转换器的环路补偿设计 在图 16 和图 21 中,具闭合电流环路的功率级 Gcv(s) 由功率级组件的选择决定,主要由电源的 DC 规格 / 性能决定。外部电压环路增益 T(s) = GCV(s)● A(s)● KREF(s) 因此由电压反馈级 KREF(s) 和补偿级 A(s) 决定。这两个级的设计将极大地决定电源的稳定性和瞬态响应。 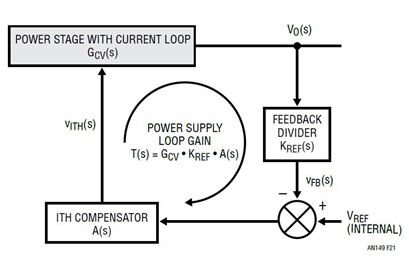 图 21:反馈环路设计的控制方框图 总之,闭合电压环路 T(s) 的性能由两个重要参数决定:环路带宽和环路稳定性裕度。环路带宽由交叉频率 fC 量化,在这一频点上,环路增益 T(s) 等于1 (0dB)。环路稳定性裕度一般由相位裕度或增益裕度量化。环路相位裕度φm的定义是在交叉频率点上总体 T(s) 相位延迟和 –180° 之差。通常需要 45° 或 60° 最小相位裕度以确保稳定性。对于电流模式控制而言,为了衰减电流环路中的开关噪声,环路增益裕度定义为在 1/2● fSW 处的衰减。一般而言,希望在 1/2● fSW 处有最小 8dB 衰减 (-8dB 环路增益)。 选择想要的电压环路交叉频率 fC 更大的带宽有助于实现更快的瞬态响应。不过,增大带宽通常会降低稳定性裕度,使控制环路对开关噪声更加敏感。一个最佳设计通常在带宽 (瞬态响应) 和稳定性裕度之间实现了良好的平衡。实际上,电流模式控制还通过在 1/2 ● fSW 处电流信号的采样效应 [3] ,而引入了一对双极点  。这些双极点在 1/2● fSW 附近引入了不想要的相位延迟。一般而言,要获得充足的相位裕度并充分衰减 PCB 噪声,交叉频率就要选为低于相位开关频率 fSW 的 1/10 至 1/6。  用 R1、R2、C1 和 C2 设计反馈分压器网络 KREF(s) 在图 16 中,DC 增益 KREF 的 KREF(s) 是内部基准电压 VREF 和想要的 DC 输出电压 Vo 之比。电阻器 R1 和 R2 用来设定想要的输出 DC 电压。  可以增加可选电容器 C2,以改进反馈环路的动态响应。从概念上来说,在高频时,C2 为输出 AC 电压信号提供低阻抗前馈通路,因此,加速了瞬态响应。但是 C2 还有可能给控制环路带来不想要的开关噪声。因此,可以增加一个可选 C1 滤波器电容器,以衰减开关噪声。如等式 11 所示,包括 C1 和 C2 的总体电阻器分压器转移函数 KREF(s) 有一个零点和一个极点。图 22 显示了 KREF(s) 的波德图。通过设计成 fz_refp_ref,C1 和 C2 与 R1 和 R2 一起,导致在以fC ENTER 为中心的频带中相位增大,相位增大量在等式 14 中给出。如果 fC ENTER 放置在目标交叉频率 fC 处,那么 KREF(s) 使相位超前于电压环路,提高了相位裕度。另一方面,图 22 还显示,C1 和 C2 提高了高频时的分压器增益。这种情况是不想要的,因为高频增益提高使控制环路对开关噪声更加敏感。C1 和 C2 导致的高频增益提高在等式 15 中给出。 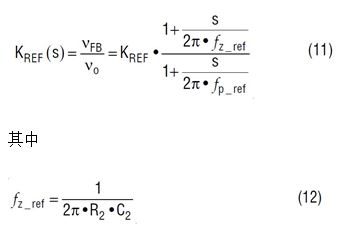 和 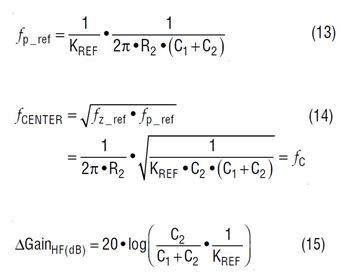 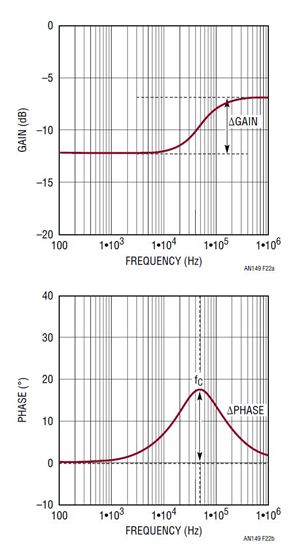 图 22:电阻器分压器增益 KREF(s) 的转移函数波德图 就给定的 C1 和 C2 而言,分压器网络导致的相位增大量  可以用等式 16 计算。此外,在 C2 >> C1 的情况下,就给定输出电压而言,最大相位增大量由等式 17 给出。从该等式中也可以看出,最大相位增大量 _max由分压比 KREF = VREF/VO 决定。既然 VREF 就给定控制器而言是固定的,那么用更高的输出电压 VO 可以得到更大的相位增大量。  选择 、C1 和 C2 时,需要在想要的相位增大量与不想要的高频增益提高量之间做出权衡。之后,需要检查总体环路增益以实现最佳值。 设计电压环路 ITH 误差放大器的 II 型补偿网络 ITH 补偿 A(s) 是环路补偿设计中最关键的一步,因为这一步决定 DC 增益、交叉频率 (带宽) 和电源电压环路的相位 / 增益裕度。就一个电流源输出、gm 跨导型放大器而言,其转移函数 A(s) 由等式 18 给出:  其中,gm 是跨导误差放大器的增益。Zith (s) 是放大器输出 ITH 引脚上补偿网络的阻抗。 从图 21 所示的控制方框图中可以看出,电压环路调节误差可由以下等式量化:  因此,为了最大限度降低 DC 调节误差,大的 DC 增益 A(s) 是非常想要的。为了最大限度提高 DC 增益 A(s),首先要将电容器 Cth 放在放大器输出 ITH 引脚处以形成一个积分器。在这种情况下,A(s) 传输增益为:  图 23 显示了 A(s) 的原理图及其波德图。如图所示,电容器 Cth 以无限高的 DC增益在 A(s) 中产生了一个积分项。不幸的是,除了初始的 –180° 负反馈,Cth 又增加了 –90° 的相位滞后。将一阶系统功率级 GCV(s) 的 –90° 相位包括进来以后,在交叉频率 fc 处的总体电压环路相位接近 –360°,该环路接近不稳定状态。 实际上,电流源 gm 放大器的输出阻抗不是一个无限大的值。在图 24 中,Ro 是 gm 放大器 ITH 引脚的内部输出阻抗。凌力尔特公司控制器的 Ro 通常较高,在 500kΩ 至 1MΩ 范围。因此,单个电容器的 A(s) 转移函数变成了等式 21。该转移函数有一个低频极点 fpo (由 RO● Cth 决定)。因此 A(s) 的 DC 增益实际上是 gm● RO。如图 24 所示,在预期的交叉频率 fc_exp 处,A(s) 仍然有 –90° 的相位滞后。  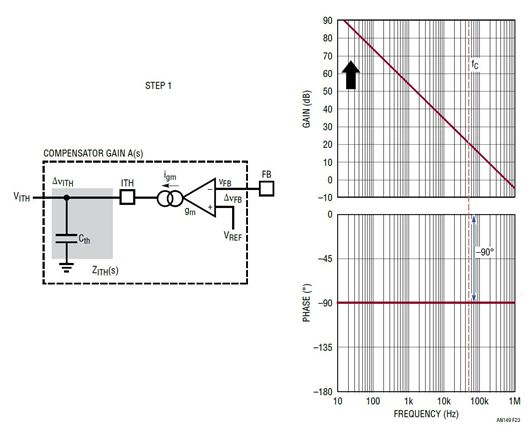 图 23:步骤 1:简单的电容器补偿网络 A(s) 及其波德图 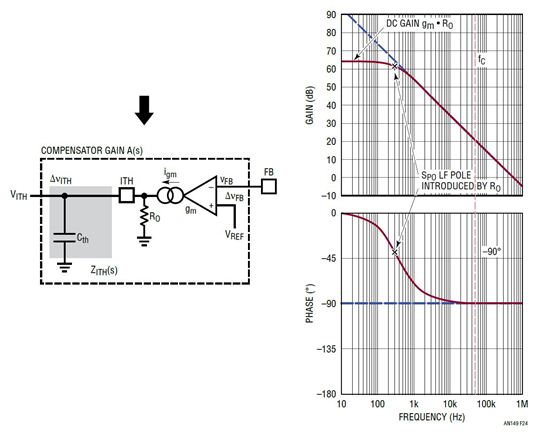 图 24:包括 gm 放大器输出阻抗 RO 的单极点 A(s) 为了提高 fc 处的相位,增加一个与 Cth 串联的电阻器 RTH 以产生一个零点,如等式 23 和图 25 所示。该零点贡献高至 +90° 超前相位。如图 25 所示,如果零点 sthz 放置在交叉频率 fC 之前,那么 A(s) 在 fC 处的相位可以显着地增大。因此,这样做提高了电压环路的相位裕度。 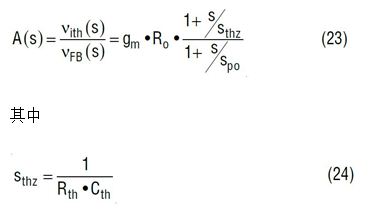 不幸的是,增加这个零点 sthz 也有害处,增益 A(s) 在 fC 以外的高频范围内显着地提高。因此,由于在开关频率处 A(s) 衰减较少,所以开关噪声更有可能进入控制环路。为了补偿这一增益提高并衰减 PCB 噪声,在 ITH 引脚至 IC 信号地之间有必要增加另一个小型陶瓷电容器 Cthp ,如图 26 所示。一般情况下,选择 Cthp th。在 PCB 布局中,滤波器电容器 Cthp 应该放置在尽可能靠近 ITH 引脚的地方。通过增加 Cthp ,最终补偿转移函数 A(s) 由等式 25 和 26 给出,其波德图如图 26 所示。Cthp 引入一个高频极点 sthp,该极点应该位于交叉频率 fC 和开关频率 fS 之间。Cthp 降低了 fS 处的 A(s) 增益,但是也有可能减小 fC 的相位。sthp 的位置是相位裕度和电源 PCB 抗噪声性能之间权衡的结果。 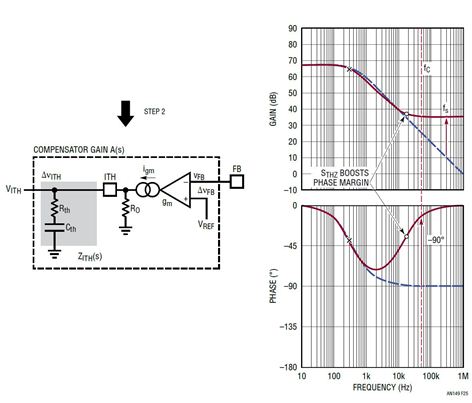 图 25:步骤 2:增加 RTH 零点以增大相位 —— 单极点、单零点补偿 A(s) 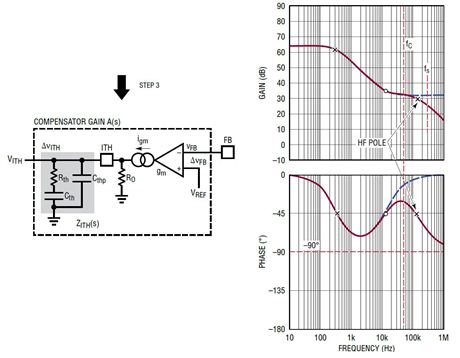 图 26:步骤 3:增加高频去耦 Cthp —— 双极点、单零点补偿 A(s)  既然电流模式功率级是一个准单极点系统,那么图 26 所示的双极点和单零点补偿网络一般足够提供所需的相位裕度了。 放大器 ITH 引脚上这个双极点、单零点补偿网络也称为 II 型补偿网络。总之,有两个电容器 CTH 和 CTHP 和一个电阻器 RTH。这个 R/C 网络与放大器输出电阻 Ro 一起,产生了一个如图 27 所示的典型转移函数,一个零点位于 fz1 处,两个极点位于 fpo 和 fp2 处。 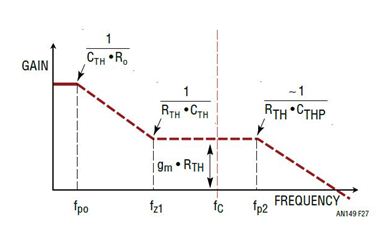 图 27:II 型补偿网络转移函数的概念图 补偿 R/C 值与负载阶跃瞬态响应 前一节讲述了 II 型补偿网络在频率域的表现。在一个闭合环路电源设计中,一个重要的性能参数是负载升高 (负载下降) 瞬态时电源的输出电压下冲 (或过充),这个参数通常直接受环路补偿设计的影响。 1)CTH 对负载阶跃瞬态的影响。CTH 影响低频极点 fpo 和零点 fz1 的位置。如图 28 所示,CTH 越小,转移函数 A(s) 的低至中频增益能越高。结果,这有可能缩短负载瞬态响应达到稳定的时间,而对 VOUT 下冲 (或过冲) 幅度没有很大影响。另一方面,CTH 越小,意味着 fz1 频率越高。这有可能在目标交叉频率 fC 处因 fz1 升高而减少增加的相位。 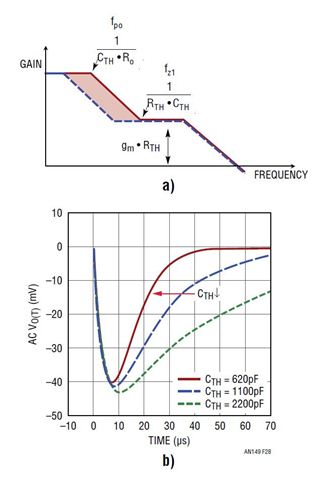 图 28:CTH 对转移函数和负载瞬态的影响 2)RTH 对负载阶跃瞬态的影响。图 29 显示,RTH 影响零点 fz1 和极点 fp2 的位置。更重要的是,RTH 越大,fz1 和 fp2 之间的 A(s) 增益就越高。因此 RTH 增大会直接提高电源带宽 fC,并在负载瞬态时降低 VOUT 的下冲 / 过冲。然而,如果 RTH 太大,电源带宽 fC 可能过高,相位裕度就不够了。 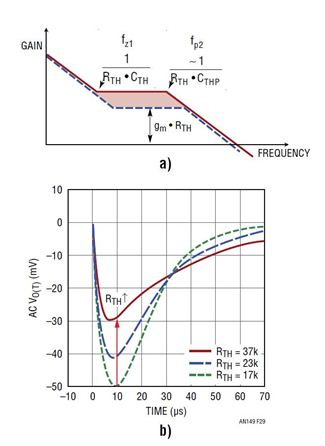 图 29:RTH 对转移函数和负载瞬态的影响 3) CTHP 对负载阶跃瞬态的影响。图 30 显示,CTHP 影响极点 fp2 的位置。CTHP 用作去耦电容器,降低 ITH 引脚的开关噪声,以最大限度减小开关抖动。如果电源带宽 fC > fp2,那么 CTHP 对负载瞬态影响就不太大。如果 CTHP 设计过度,导致 fp2 靠近 fC,那么它就可能减小带宽和相位裕度,导致瞬态下冲 / 过冲增大。 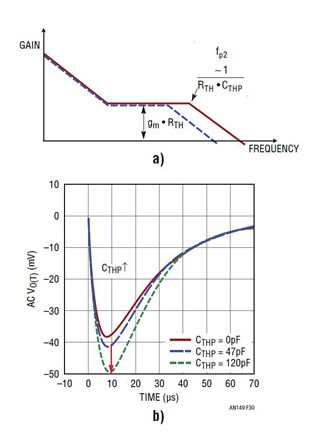 图 30:CTHP 对转移函数和负载瞬态的影响 用 LTpowerCAD 设计工具设计一个电流模式电源 通过 LTpowerCAD 设计工具,用户可以非常容易地设计和优化凌力尔特电流模式电源的环路补偿及负载瞬态性能。很多凌力尔特产品都可用其环路参数准确地建模。首先,用户需要先设计功率级,在这一步,他们需要设计电流检测网络,确保为 IC 提供足够的 AC 检测信号。之后,在环路设计页面,用户可以通过简便地移动滑动条,观察总体环路带宽、相位裕度和相应的负载瞬态性能,依此调节环路补偿 R/C 值。就一个降压型转换器而言,用户通常需要设计低于 1/6 fSW 的带宽,有至少 45° (或 60°) 的相位裕度,在 1/2fSW 处至少有 8dB 的总体环路增益衰减。就一个升压型转换器而言,由于存在右半平面零点 (RHPZ),所以用户需要设计低于最差情况 RHPZ 频率 1/10 的电源带宽。LTpowerCAD 设计文件可以输出到 LTspice 进行实时仿真,以检查详细的电源动态性能,例如负载瞬态、加电 / 断电、过流保护 … 等等。 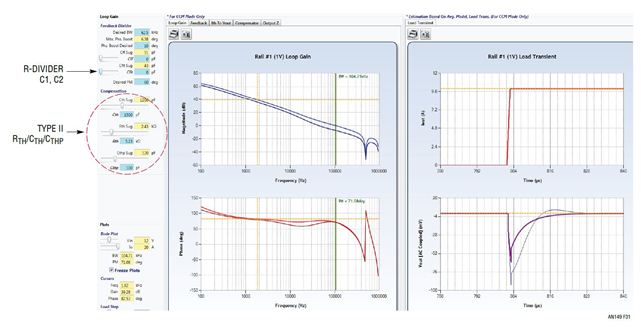 图 31:LTpowerCAD 设计工具减轻了环路补偿设计和瞬态优化负担 测量电源环路增益 LTpowerCAD 和 LTspice 程序不是用来取代真实电源的最终工作台环路增益测量。在将设计投入最终生产之前,总是有必要进行测量。尽管电源模型理论上是正确,但是这些模型不可能全面考虑到电路寄生性和组件非线性,例如输出电容器的 ESR 变化、电感器和电容器的非线性 … 等等。另外,电路 PCB 噪声和有限的测量准确度还可能引起测量误差。这就是为什么有时理论模型和测量结果可能相差很大的原因。如果发生这种情况,负载瞬态测试就可以用来进一步确认环路稳定性。 图 32 显示了用频率分析仪系统测量一个非隔离式电源的典型电源环路增益的测量配置。为了测量环路增益,在电压反馈环路中插入了一个 50Ω 至 100Ω 的电阻,并给这个电阻器加上了一个 50mV 隔离式 AC 信号。通道 2 连接到输出电压,通道 1 连接到这个电阻器的另一侧。环路增益由频率分析仪系统通过 Ch2/Ch1 计算。图 33 显示了测得的和 LTpowerCAD 计算得出的典型电流模式电源 LTC3851A 之环路波德图。在关键的 1kHz 至 100kHz 频率范围内,两条曲线吻合得非常好。 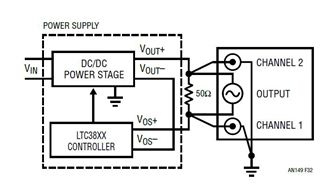 图 32:测量电源环路增益的测试配置 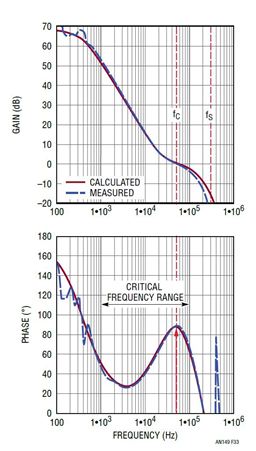 图 33:测得的和 LTpowerCAD 建模得到的电流模式降压型转换器之环路增益 其他导致不稳定性的因素 工作条件: 如果在示波器上电源开关或输出电压波形看起来不稳定或有抖动,那么首先,用户需要确保电源是在稳态条件下工作的,没有负载或输入电压瞬态。对于非常小或非常大的占空比应用而言,如果进入脉冲跳跃工作模式,就要检查是否达到了最短接通时间或断开时间限制。对于需要外部同步信号的电源而言,要确保信号干净并位于控制器数据表给定的线性范围之内。有时还有必要调整锁相环 (PLL) 滤波器网络。 电流检测信号和噪声: 在电流模式电源中,为了最大限度地降低检测电阻器的功率损耗,最大电流检测电压一般非常低。例如,LTC3851A 可能有 50mV 最大检测电压。PCB 噪声有可能干扰电流检测环路,并导致开关表现不稳定。为了通过调试以确定是否确实是环路补偿问题,可以在 ITH 引脚到 IC 地之间放置一个大型 0.1μF 电容器。如果有了这个电容器电源仍然不稳定,那么下一步就是检查设计方案。一般而言,电感器和电流检测网络应该设计成,在 IC 电流检测引脚上至少有 10mV 至 15mV 峰值至峰值 AC 电感器电流信号。另外,电流检测走线可以用一对扭绞跨接线重新布设,以检查这样是否能解决问题。 对于 PCB 布局而言,有一些重要考虑因素 [6] 。总之,通常需要用一对紧挨着布设、返回 SENSE+和 SENSE-引脚的电流检测走线实现开尔文检测。如果某个 PCB 通孔用在 SENSE-网中,那么要确保这个通孔不接触到其他 VOUT 平面。跨接 SENSE+和 SENSE-的滤波器电容器应该通过直接走线连接,放置在尽可能靠近 IC 引脚的地方。有时需要滤波器电阻器,而且这些电阻器也必须靠近 IC。 控制芯片组件放置与布局: 控制 IC 周围组件的放置和布局也是至关重要的 [6] 。如果可能,所有陶瓷去耦电容器都应该靠近其引脚。尤其重要的是,ITH 引脚电容器 Cthp 要尽可能靠近 ITH 及 IC 信号地引脚。控制 IC 应该从供电电源地 (PGND) 有一个单独的信号地 (SGND)。开关节点 (例如 SW、BOOST、TG 和 BG) 应该远离敏感的小信号节点 (例如电流检测、反馈和 ITH 补偿走线)。 总结 对于开关模式电源而言,人们常常认为环路补偿设计是一项富有挑战性的任务。对于具快速瞬态要求的应用而言,设计具大带宽和充足稳定性裕度的电源是非常重要的。这通常是一个非常耗时的过程。本文讲述了一些关键概念,以帮助系统工程师了解这项任务,使用 LTpowerCAD 设计工具可将电源环路设计和优化变得简单得多。 参考文献 [1] 《Opti-Loop Architecture Reduces Output Capacitance and ImpRoves Transient Response》, 作者:J. Seago,凌力尔特公司《Application Note 76》,1999年5月。 [2] 《Simplified Analysis of PWM Converters Using the Model of the PWM Switch: Parts I and II》, 作者:V. Vorperian,《IEEE Transactions on AeRospace and ElectRonic Systems》,1990年3月,26卷,第二册。 [3] 《An Accurate and Practical Small Signal Model for Current-Mode ContRol》, 作者:R. B. Ridley,www.ridleyengineering.com。 [4] 《Current-Mode ContRol: Modeling and its Digital Application》,作者:J. Li,美国弗吉尼亚理工大学博士论文,2009年4月。 [5] LTpowerCAD 设计工具和用户指南可在 www.linear.com.cn/LTpowerCAD 下载。 [6] 《PCB Layout Considerations for Non-Isolated Switching Power Supplies》,作者:H. Zhang,《Application Note 136》 可在 www.linear.com.cn 下载。 [7] 《Basic Concepts of Linear Regulator and Switching Mode Power Supplies》, 作者:H. Zhang,《Application Note 140》 可在 www.linear.com.cn 下载。 |
网友评论