
跳频技术在GPS移动车辆监控系统中的应用
发布时间:2010-6-24 15:29
发布者:vinda
|
1 目前系统存在的问题及跳频系统的组成 全球卫星定位移动车辆监控系统(Global Positioning System-Automatic Vehicle Location,简称GPS-AVL)是在全球卫星定位系统GPS、地理信息系统GIS (Geography Information System)和移动通信网技术上实现的移动目标管理系统。GPS-AVL系统由指挥监控基站和移动车载单元两部分组成。 目前,GPS-AVL系统存在的问题主要有:车载单元与监控中心之间的动态数据交换速率低、GIS电子地图的实时显示和实时报警速度慢、容量和信道的使用效率不高。随着现代反高科技作案和反电子对抗课题的提出,这些问题更加突出,并且增加了通信的隐蔽性、保密性和抗恶意干扰、抗多径衰落的要求。 为此,可在原有普通电台系统的基础上加以改进,综合跳频(FH)通信、码分多址(CDMA)、时分多址(TDMA)等多种技术,采用全新的小区制两级蜂窝组网方式和通信协议组建GPS-AVL系统,系统组成原理如图1所示。 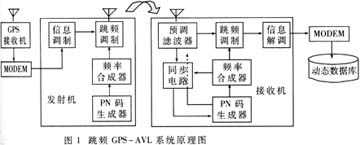 2 跳频关键技术 2.1 跳频图案的构造 跳频图案的选择对跳频通信系统性能的好坏有决定性的影响。由于各用户的跳频超始相位不同,传输延时差异等因素,要做到跳频图案无相互干扰极其困难。跳频频隙的"击中"或者称为"碰撞",可用参数汉明相关来衡量。 2.1.1 跳频图案设计要求 (1)每个跳频序列都可以使用频隙集合中的所有频隙,以实现处理增益最大; (2)跳频序列数目尽量多且实现电路尽量简单,以实现多址通信; (3)跳频序列集合中任意两个跳频序列在所有相对时延下,发生频隙重合的次数应尽可能少,同时跳频序列集合中的任意跳频序列与其跳频平移序列的重合次数也应尽可能少,即要求汉明互相关和汉明自相关越小越好; (4)跳频序列应有良好的均匀性、随机性和较大的线性复杂度,以使系统具有良好的抗干扰性能,且令敌方不能利用以前传输的频率信息预测当前和以后的频率; (5)跳频序列应能实现宽频隙跳频,以对抗宽带阻塞干扰、跟踪干扰和抗多径衰落。 2.1.2 跳频图案实现电路 理论分析表明:假设重合次数为k,频隙数目q=pn p为素数),性能最优的跳频序列码是长度为L=q-1,信息元b=k+1的(L,b)RS码。它为非重复序列族,序列数目为q;序列汉明自相关旁瓣为0;两序列在任意相对时延τ下,汉明互相关不大于1。在本系统中,设定k=1p=2n=5q=pn=25=32则L=q-1=31b=k+1=2。为实现宽频隙跳频,采用对偶频带法构造跳频序列族,可满足设计要求。假定跳频频隙不小于32Δf,选取(31,2)RS码,跳频序列按如下步骤构造: (1)在频隙集合F= 0,1,…,63?上构造两个区间频带,分别为:F1=?0,1,…,31?和F2=?32,33,…,63?; (2)选择n=5次本原多项式:f?x =x5+x2+1; (3)以f?x 为联接多项式的m序列发生器产生非零状态序列G=?a1a2…a31?? (4)在G的各项加上一个该m序列的固定状态aV=?v1v2…,v5?,即可生成区间F1和F2上的两族非重复跳频序列: S1v?j =?S1v?j =αj+αvj=12…,31? S2v?j =?S2v?j =αj+αv+32 j=12…,31? 式中,加法按逐位模2运算; (5)组合区间F1和F2上的两族跳频序列得到新的一族跳频序列SV(j 。由于跳频频隙不小于32Δf,所以实际上SV?j 在区间F1和F2上的跳频频隙相互交错,即: SV?j 其中n=01…… 跳频序列SV(j 的实现电路如图2所示。 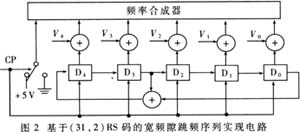 2.2 频率合成技术 系统跳频锁定时间主要由锁相环跳频锁定时间决定,对于半双工电台还得解决发射接收功放电路的切换时延问题。本系统采用全双工电台,频率合成器采用日本富士通公司的MB1504,工作频段为403~443MHz,参考频率为Fr=25kHz。 为了既考虑鉴相波纹的抑制能力,又要兼顾环路的瞬态特性,选取ξ≈0.707ωn≤ωR/5。根据ξ、ωn及环路增益可唯一确定环路滤波器RC常数。考虑到增加PLL环路增益可以缩短环路锁定时间,在环路滤波器之后,再增加一级集成运放。则锁相环环路换频锁定时间tS可以按如下近似公式计算: 但实际电路中由于串行送数的局限和电路中分布参数的影响,tS为理论值的5~6倍左右,小于1ms。 2.3 跳频同步技术 2.3.1 设计要求 对于跳频通信,应保证以下三种同步: (1)跳频图案同步,即跳频接收机与发射机的跳频图案要求相互一致; (2)载波同步,即发送信号载频和接收本地信号载频之差,应落在中频带通滤波器内; (3)码元同步,可分为跳频码元同步和信息码元同步。 2.3.2 硬件设计 跳频同步包括同步捕捉和同步跟踪两个过程。首先由捕获过程保证跳频图案的同步,然后进行载波同步跟踪和码元同步跟踪。 同步捕捉可利用GPS OEM模块的高精度秒脉冲信号进行同步。秒脉冲信号的起点精度ΔTUTC可达±1μs,甚至为±50ns,其秒脉宽为100ms,上升沿是世界协调时UTC(Universal Time Coordinated 时刻。电路实现如图3所示。 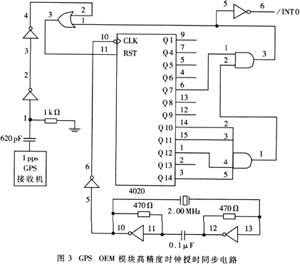 秒脉冲信号1PPS经微分电路得到窄脉冲秒信号,对分频电路定时清零,从而做到本地的毫秒时钟与UTC同步。分频电路得到的周期为5ms的脉冲信号送往CPU的中断/INT0,作为跳频图案同步信号。 跳频速率为200hop/s,即跳频时隙间隔Δt1为5ms;假设信息传输速率为100kb/s,即信息元宽度Δt2为10μs,则跳频码元同步时间误差和信息码元同步时间误差分别为: 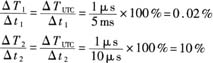 所以可以不加码元同步跟踪电路,而载波同步跟踪则可以由锁相环电路实现。 采用高精度时钟授时同步组网有如下优点:在任一时隙中各用户发射的是彼此互不相同的频隙,不会相互干扰;可对抗敌方利用单一频率的方法进行测向,因为在任一时隙中各用户发射互不相同的所有频隙。 3 GPS-AVL系统组网方案 网络结构为两级星形蜂窝跳频(FH)通信系统,由两个固定基站和八个移动基站组成,用以监控GPS-AVL系统的警车、运钞车、消防车、救护车等近两百部GPS移动车载单元。网络拓朴结构如图4所示。  两个固定基站为原系统之大功率基站,由时分双工改为码分双工,即发射和接收各选用一幅相互正交的跳频图案以实现收发并行处理。而移动基站为码分双工,每个移动基站的发射和接收机亦各选用一幅相互正交的跳频图案以实现收发并行处理。监控中心节点、移动基站和移动车载单元的电台完全一致,统一的电台系统便于维护和更换。 每个移动基站容量设定为管理32部移动车载单元,8个移动基站足以管理256部移动车载单元。每4个移动车载单元的GPS定位信息以TDMA的方式汇接成1个移动基站的数据,而移动车载单元靠CDMA方式区分移动基站;移动基站再将移动车载单元的GPS定位信息发送给固定基站,每4个移动基站的数据亦以TDMA的方式汇接成1个固定基站的数据,移动基站亦靠CDMA方式区分固定基站;然后由监控中心的两部电台并行接收来自两个固定基站的数据,最后存入动态数据库以备进一步的处理和实时GIS电子地图显示。 在同一小区内,离基站近的和远的移动车载单元虽然按同一跳频图案通信,但由于它们被安排在不同的时隙上通信,所以离基站远的信号不会被离基站近的信号所掩盖,即FH/CDMA-TDMA系统能在频域和时域上使远近信号完全分开。因此无须采用自动功率控制技术,即可解决扩频通信系统的"远-近效应"问题。 |

网友评论