
вЛжжЛљгкIntel8253гыL298NЕчЛњPWMЕїЫйЗЈ
ЗЂВМЪБМфЃК2010-6-9 11:52
ЗЂВМепЃКЮваОвРОЩ
|
1 в§бд ТіГхПэЖШЕїжЦ(Pulse Width ModulationЁЊPWM)ЪЧжИНЋЪфГіаХКХЕФЛљБОжмЦкЙЬЖЈЃЌЭЈЙ§ЕїећЛљБОжмЦкФкЙЄзїжмЦкЕФДѓаЁРДПижЦЪфГіЙІТЪЁЃдРэОЭЪЧПЊЙиЙмдквЛИіжмЦкФкЕФЕМЭЈЪБМфЮЊtЃЌжмЦкЮЊTЃЌдђЕчЛњСНЖЫЕФЦНОљЕчбЙU=Vcc t/T=aVccЁЃЦфжаЃЌa=t/T(еМПеБШ)ЃЌVccЪЧЕчдДЕчбЙЁЃЕчЛњЕФзЊЫйгыЕчЛњСНЖЫЕФЕчбЙГЩБШР§ЃЌЖјЕчЛњСНЖЫЕФЕчбЙгыПижЦВЈаЮЕФеМПеБШГЩе§БШЃЌвђДЫЕчЛњЕФЫйЖШгыеМПеБШГЩБШР§ЃЌеМПеБШдНДѓЃЌЕчЛњзЊЕУдНПьЁЃ PWMГЃШЁДњЪ§ЃЏФЃзЊЛЛЦї(DAC)гУгкЙІТЪЪфГіПижЦЃЌЦфжаЃЌжБСїЕчЛњгыНЛСїЕчЛњЕФЫйЖШПижЦЪЧзюГЃМћЕФгІгУЁЃЭЈГЃPWMХфКЯЧХЪНЧ§ЖЏЕчТЗЪЕЯжжБСїЕчЛњЕїЫйЃЌЗЧГЃМђЕЅЃЌЧвЕїЫйЗЖЮЇДѓЁЃ 2 Intel8253ЕФФкВПНсЙЙМАЙЄзїФЃЪН 2.1 Intel8253ЕФФкВПНсЙЙ Intel8253ЪЧЮЂаЭМЦЫуЛњЭтЮЇНгПкЕчТЗЃЌФкВПАќКЌ3ИіБЫДЫЖРСЂЕФ16ЮЛМѕЗЈМЦЪ§ЦїЁЃУПИіМЦЪ§ЦїЖМПЩгЩШэМўШЗЖЈЮЊ16ЮЛЖўНјжЦМѕЗЈМЦЪ§ЦїЛђепЪЎНјжЦ4ЮЛBCDМѕЗЈМЦЪ§ЦїЁЃУПИіМЦЪ§ЦїЖМга6жжВЛЭЌЕФЙЄзїФЃЪНЃЌвВгЩШэМўШЗЖЈЁЃУПИіМЦЪ§ЦїЖМгавЛИіЪБжгЪфШыЖЫ(CLK)ЁЂвЛИіУХПиаХКХЪфШыЖЫ(GATE)КЭЪфГіЖЫ(OUT)ЁЃЖСаДгЩA1ЁЂЃЎA0ЁЂRDЁЂWRКЭCSЕШв§НХМгвдПижЦЃЌжївЊгУвдПижЦIntel8253ЕФЪ§ОнгыУќСюЕФаДШыЁЂЖСШЁгыНћжЙЁЃIntel8253ЕФв§НХХХСаШчЭМ1жаЕФU3ЫљЪОЁЃ 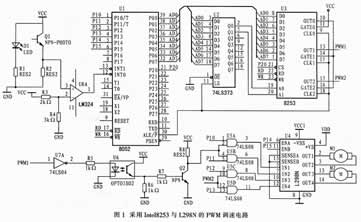 2.2гыPWMгаЙиЕФЙЄзїФЃЪН гыPWMгаЙиЕФЙЄзїФЃЪНЪЧФЃЪНlКЭФЃЪН2ЁЃ (1)ФЃЪН1 ЕБФГМЦЪ§ЦїЩшжУдкФЃЪН1вдКѓЃЌЮЂаЭМЦЫуЛњПЩвдЭЈЙ§ЖўЬѕЪфГіжИСюНЋ16ЮЛЪ§ОнMЫЭШыИУМЦЪ§ЦїЁЃетЪБИУМЦЪ§ЦїЕФЪфГіЖЫВЂЮоШЮКЮЯьгІЁЃвЛЕЉИУМЦЪ§ЦїЕФУХПиЪфШыЖЫТіГхЩЯЩ§биЕНЪБЃЌЫќЕФЪфГіЖЫСЂПЬЪфГівЛИіПэЖШЮЊMTЕФИКЯђТіГхЃЌШчЭМ2ЫљЪОЁЃ 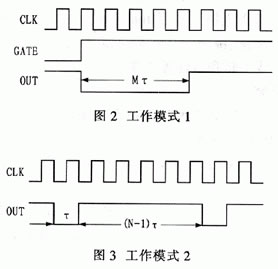 (2)ФЃЪН2 ЕБФГМЦЪ§ЦїЩшжУдкФЃЪН2вдКѓЃЌЮЂаЭМЦЫуЛњПЩвдЭЈЙ§ЖўЬѕЪфГіжИСюНЋ16ЮЛЪ§ОнЂєЫЭШыИУМЦЪ§ЦїЁЃЪфГіжИСюНсЪјКѓЃЌИУМЦЪ§ЦїСЂМДЪфГіжмЦкЮЊNTЕФСЌајЗНВЈЃЌШчЭМ3ЫљЪОЁЃ ШчЙћНЋ8253ЕФМЦЪ§Цї0КЭМЦЪ§Цї1ЗжБ№ЩшжУдкФЃЪН2КЭФЃЪН1ЃЌВЂАДЭМ4ЫљЪОСЌНгЃЌОЭПЩвдЕУЕНвЛИіЪЎЗжМђЕЅЕФТіПэЕїжЦЗЂЩњЦїЁЃЙЄзїПЊЪМЧАЃЌЯШНЋГЃЪ§ЂєЫЭШыМЦЪ§Цї0ЃЌдйНЋГЃЪ§MЫЭШыМЦЪ§Цї1жаЁЃ 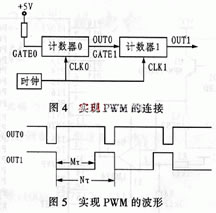 2.3 PWMГЬађ Intel8253ЕФЖСаДПижЦТпМгЩA1ЁЂA0ЁЂRDЁЂWRКЭCSЕШв§НХМгвдПижЦЃЌЦфжаЃЌЖЫПкбЁдёаХКХA1ЁЂA0ОіЖЈ3ИіМЦЪ§ЦїЁЂПижЦМФДцЦїжаФФвЛИіНјааЙЄзїЃЌA1ЃЌA0ЃК00ЁЊ10 CPUбЁдёМгвЛ#2МЦЪ§ЦїНјааЖСЃЏаДЃЌ11 CPUНЋПижЦзжаДШыIntel8253ЁЃ Intel8253ЕФПижЦМФДцЦїШчЯТЃК SC1 SC0 RW1 RW0 M2 M1 M0 BCD M2ЃЌM1ЃЌMOЃК000ЁЊ101бЁдёЙЄзїФЃЪН0-5 SClЃЌSC0ЃК00-10бЁдёМЦЪ§Цї#o-#2ЃЌ11ЛиЖСУќСю BCDЃК0ЖдгІЖўНјжЦМЦЪ§ЃЌ1ЖдгІBCDМЦЪ§ RWlЃЌRW0ЃК00ЫјзЁМЦЪ§ЦїЮШЖЈЖСЪ§ЃЌ01жЛЖСЃЏаДЕЭ8ЮЛзжНкЃЌ10жЛЖСЃЏаДИп8ЮЛзжНкЃЌ1lЯШЖСЃЏаДЕЭ8ЮЛзжНкЃЌКѓЖСЃЏаДИп8ЮЛзжНкЁЃ ЁЁ. mov dptlr,#Ofe03hЃКЖд8253ПижЦМФДцЦїГѕЪМЛЏ nov a,#34h бЁдёМЦЪ§Цї0ЁЂЙЄзїФЃЪН2 movx@dotr,a ЯШЖСЃЏаДЕЭ8ЮЛКѓЖСЃЏаДИп8ЮЛ mov dptr,#0fe00hЃКЯђМЦЪ§Цї0ЫЭЕЭ8ЮЛЪ§Он80H nov a,#80h movx@dptrЃЌa mov dptr,#0fe00hЃКЯђМЦЪ§Цї0ЫЭИп8ЮЛЪ§Он00H nov a,#00h movx@dptr,a nov dotr,#Ofe03hЃКЖд8253ПижЦМФДцЦїГѕЪМЛЏ mov a,#72h бЁдёМЦЪ§Цї1ЁЂЙЄзїФЃЪНl movx@dptrЁЏЃЌa mov dpuЃЌ#0fe01hЃЛЯђМЦЪ§Цї1ЫЭЕЭ8ЮЛЪ§Он20H nOV a,#20h movx@dptr,a nov dptrЃЌ#Ofe01hЃКЯђМЦЪ§Цї1ЫЭИп8ЮЛЪ§Он00H nov a,#00h movx@dptr,a ЁЁ ИљОнвдЩЯГЬађЃЌПЩвдЕУЕНеМПеБШЮЊ a=tЃЏT=0020HЃЏ0080H=25ЃЅ ЭЌРэЁЃНЋIntel8253ЕФМЦЪ§Цї0КЭМЦЪ§Цї2ЗжБ№ЩшжУдкФЃЪН2КЭФЃЪН1ЃЌВЂАДЭМ4ЕФСЌНгЗНЗЈвВПЩвдЕУЕНСэвЛИіPWM2ЁЃ 3 L298NаЭЧ§ЖЏЦїЕФдРэМАгІгУ L298NЪЧSGSЙЋЫОЕФВњЦЗЃЌФкВПАќКЌ4ЭЈЕРТпМЧ§ЖЏЕчТЗЁЃЪЧвЛжжЖўЯрКЭЫФЯрЕчЛњЕФзЈгУЧ§ЖЏЦїЃЌМДФкКЌЖўИіHЧХЕФИпЕчбЙДѓЕчСїЫЋШЋЧХЪНЧ§ЖЏЦїЃЌНгЪеБъзМTTLТпМЕчЦНаХКХЃЌПЩЧ§ЖЏ46VЁЂ2AвдЯТЕФЕчЛњЁЃЦфв§НХХХСаШчЭМ1жаU4ЫљЪОЃЌ1НХКЭ15НХПЩЕЅЖРв§ГіСЌНгЕчСїВЩбљЕчзшЦїЃЌаЮГЩЕчСїДЋКХЁЃL298ПЩЧ§ЖЏ2ИіЕчЛњЃЌOUTlЁЂOUT2КЭOUT3ЁЂOUT4жЎМфЗжБ№Нг2ИіЕчЖЏЛњЁЃ5ЁЂ7ЁЂ10ЁЂ12НХНгЪфШыПижЦЕчЦНЃЌПижЦЕчЛњЕФе§ЗДзЊЃЌENAЃЌENBНгПижЦЪЙФмЖЫЃЌПижЦЕчЛњЕФЭЃзЊЁЃ ШчЭМ1ЫљЪОЃЌЃКIntel8253ЪфГіЖўзщPWMВЈЃЌУПвЛзщPWMВЈгУРДПижЦвЛИіЕчЛњЕФЫйЖШЃЎСэЭтЖўИіIЃЏOПкПЩвдПижЦЕчЛњЕФе§ЗДзЊЃЎПижЦЗНЗЈгыПижЦЕчТЗЖМБШНЯМђЕЅЁЃМДP10ЁЂP11ПижЦЕквЛИіЕчЛњЕФЗНЯђЃЌЪфШыЕФЃКPWMlПижЦЕквЛИіЕчЛњЕФЫйЖШЃЛP12ЁЂP13ПижЦЕкЖўИіЕчЛњЕФЗНЯђЃЌЪфШыЕФPWM2ПижЦЕкЖўИіЕчЛњЕФЫйЖШЁЃ гЩгкЕчЛњдке§ГЃЙЄзїЪБЖдЕчдДЕФИЩШХКмДѓЃЌжЛгУвЛзщЕчдДЪБЛсгАЯьЕЅЦЌЛњЕФе§ГЃЙЄзїЁЃЫљвдбЁгУЫЋЕчдДЙЉЕчЁЃвЛзщ5VЕчдДИјЕЅЦЌЛњКЭПижЦЕчТЗЙЉЕчЃЌСэЭтвЛзщ5VЁЂ9VЕчдДИјL298NЕФ+VSSЁЂ+VSЙЉЕчЁЃдкПижЦВПЗжКЭЕчЛњЧ§ЖЏВПЗжжЎМфгУЙтёюИєПЊЃЌвдУтгАЯьПижЦВПЗжЕчдДЕФЦЗжЪЁЃ ЭМ1ОЭЪЧвЛИіЪЕЯжжЧФмаЁЦћГЕЕФгІгУЕчТЗЁЃD1ЁЂQ1ЪЧвЛЖдКьЭтЗЂЩфНгЪеЖдЙмЃЌгыLM324ЙЙГЩЙтЕчДЋИаМьВтЕчТЗЁЃЭЈЙ§Intel8253КЭ1298NПЩЪЕЯжЦћГЕЕФМгЫйЁЂМѕЫйЁЂЩВЭЃЃЌВЂПЩЭЈЙ§СНИіЕчЛњЕФВЛЭЌзЊЫйЪЕЯжзѓзЊКЭгвзЊЕШЙІФмЁЃ |



ЭјгбЦРТл