
S3C2440-WDT
发布时间:2011-3-25 14:28
发布者:techshare
|
当系统运行受到外部干扰或者系统错误,程序有时会出现跑飞,导致整个系统瘫痪。他会设置一段时间,当超出这段 时间,从程序中跳出进入中断处理程序。WatchDog本质上是一种定时器,那么普通定时器拥有的特性它也应该具备,是的当它计时超时时也会引起事件的发生,只是这个事件除了可以是系统中断外,他也可以是一个系统重启信号(Reset Signal)。可以这么说,能发送系统重启信号的定时器我们就叫它WatchDog。看门狗定时器中断是我们不希望看到的,因此我们要想方设法避免它发生。主要的方法就是在中断发生前,重新对看门狗定时器的寄存器进行赋值,使它的定时器重新开始记时,这种方法俗称喂狗。 S3C2440看门狗定时器的功能: 下面是看门狗定时器示意图: 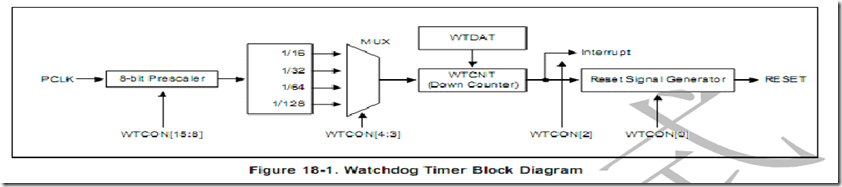 看门狗模块包括一个8位预分频器,一个分频器,一个16bit计数器。它的8位预分频器把PCLK分频后,再被分频得到4种频率,16分频,32分频,64分频,128分频。WatchDog可以选择工作于哪种频率下。S3C2440用3个寄存器对WatchDog进行操作: 看门狗定时器控制寄存器: WATCHDOG TIMER CONTROL REGISTER WTCON允许用户使能看门狗定时器,从不同四个源选择时钟,使能中断,使能看门狗定时器输出。S3C2440看门狗定时器用于系统故障后复位。如果不希望复位,则使能定时器无效。 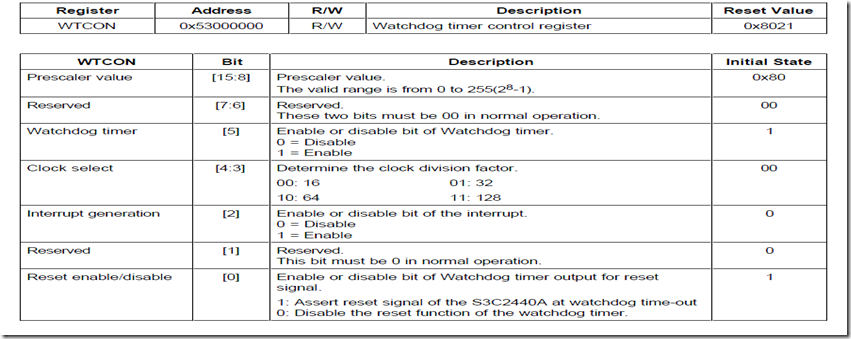 看门狗定时器数据寄存器: WATCHDOG TIMER COUNT REGISTER WTDAT用于确定超时期限。WTDAT的内容在最初的定时器操作时不能自动加载到定时器计数其中。但使用0x80将驱使第一次超时,在这种情况下,WTDAT的值将自动载入WTCNT。  看门狗定时器计数寄存器: WTCNT包含看门狗定时器的当前值。  下面是看门狗复位的程序: #define WTCON (*(volatile unsigned *) 0x53000000) #define WTDAT (*(volatile unsigned *) 0x53000004) #define WTCNT (*(volatile unsigned *) 0x53000008) int WdtMain(){ WTCON = 0x64<<8; //Prescaler=100,时钟频率为3.9KHz WTCON |= (0x1<<5)|(0x1); //看门狗定时器超时,发出复位信号 WTCON |= 0x3<<3; //Division=128 WTDAT = 0x2DC6; //使复位时间为3s WTCNT = 0x2DC6; while(1){} return 0; } 看门狗定时程序: #define rGPBCON (*(volatile unsigned *)0x56000010) #define rGPBDAT (*(volatile unsigned *)0x56000014) #define rGPBUP (*(volatile unsigned *)0x56000018) #define rSRCPND (*(volatile unsigned *)0x4a000000) #define rINTMSK (*(volatile unsigned *)0x4a000008) #define rINTPND (*(volatile unsigned *)0x4a000010) #define rSUBSRCPND (*(volatile unsigned *)0x4a000018) #define rINTSUBMSK (*(volatile unsigned *)0x4a00001c) #define rWTCON (*(volatile unsigned *)0x53000000) #define rWTDAT (*(volatile unsigned *)0x53000004) #define rWTCNT (*(volatile unsigned *)0x53000008) #define _ISR_STARTADDRESS 0x33ffff00 #define pISR_WDT_AC97 (*(unsigned *)(_ISR_STARTADDRESS+0x44)) #define U32 unsigned int void delay(int a) { int k,i,j; for(k=0;k<a;k++) for(i = 0; i < 0xff; i++) for(j = 0; j < 0xff; j++) ; } void __irq WDT_ISR(void){ rGPBDAT |= 0x1; delay(100); rGPBDAT &= 0xfe; rSUBSRCPND = 0x1<<13; rSRCPND = 0x1<<9; //SRCPND 通过写入数据清零,如果不清零,会反复进行请求 rINTPND = 0x1<<9; } int Main(){ rGPBCON = 0xfffc; rGPBCON |= 0x1; rWTCON = 0x64<<8; //Prescaler=100 rWTCON |= (0x1<<5)|(0x1<<2); //WDT计时器使能,中断使能 rWTCON |= 3<<3; rWTDAT = 0x1E84; //使中断时间为2s rWTCNT = 0x1E84; rSUBSRCPND = 0x1<<13; rSRCPND = 0x1<<9; //SRCPND 通过写入数据清零,如果不清零,会反复进行请求 rINTPND = 0x1<<9; rINTSUBMSK = "(0x1<<13); rINTMSK = "(0x1<<9); pISR_WDT_AC97 = (U32)WDT_ISR; while(1); return 0; } 李万鹏 |
网友评论