
ЛљгкAutofaceЕФНнСЊЙпЕМЯдПиЯЕЭГЩшМЦ
ЗЂВМЪБМфЃК2010-12-27 19:46
ЗЂВМепЃКdesigner
|
ЫцзХПЦбЇММЪѕЕФЗЩЫйЗЂеЙЃЌЙпадЕМКНММЪѕЙуЗКгІгУгкОќЪТСьгђЃЌФмЙЛОЋШЗжЦЕМЮфЦїЁЂЗЩЛњЁЂКНПеЦїЕШЁЃдчЦкЕФЙпЕМЯЕЭГВЩгУЛњаЕЦНЬЈЪНЃЌКѓРДж№ВНБЛНнСЊЙпЕМЯЕЭГ(SINS)ЫљШЁДњЁЃЯжДњЕФИпПЦММеНељвЊЧѓЮфЦїЯЕЭГЗДгІСщУєЁЂВйзїМђЕЅЁЂПЩППадИпЃЌДпЩњСЫДЅУўЦСЮфЦїПижЦЯЕЭГЕФЕЎЩњЃЌШчУРОќЕФЕЅБјДЅУўЪНGPSЕМКНвЧЁЂЕТОќЕФДЅУўЪНЛ№ХкУщзМЯЕЭГЕШЁЃЮвЙњЕФНнСЊЙпЕМЯЕЭГЦ№ВННЯЭэЃЌЕЋгЩгкЙњФкЯрЙиЦїМў(ШчЃКМЄЙтЭгТнЁЂМгЫйЖШМЦ)ЕФжЦдьММЪѕЯрМЬГЩЪьЃЌЮвЙњЕФНнСЊЙпЕМММЪѕвВЕУЕНПьЫйЗЂеЙЃЌВЂШЁЕУвЛЖЈГЩОЭЁЃетРяеыЖдЮФЯзжаМЄЙтЭгТнНнСЊЙпЕМЯЕЭГЕФЪЕМЪЧщПіЃЌЩшМЦСЫМЄЙтЭгТнНнСЊЙпЕМЯЕЭГЕФЯдПиВПЗжЃЌЦфжаЯдЪОЦїВЩгУVT5057LаЭЕЅЩЋДЅУўЦСЁЃ 1 НнСЊЙпЕМЯдПиЯЕЭГНсЙЙ НнСЊЙпЕМЯдПиЯЕЭГгЩЕМКНДЅУўЯдЪОЦїКЭЕМКНЪ§ОнДІРэМЦЫуЛњзщГЩЁЃЕМКНДЅУўЯдЪОЦїЪЧећИіЕМКНЯЕЭГжаживЊзщГЩВПЗжжЎвЛЃЌЫќЯђећИіЕМКНЯЕЭГЪфШыУќСюПижЦећИіЕМКНЯЕЭГЙЄзїЃЌЭЌЪБНгЪеНтЫуКѓЕФЪЕМЪЕМКНВЮЪ§ВЂНЋЦфНјааЯдЪОЃЌИљОнетаЉВЮЪ§ХаЖЯећИіЕМКНЯЕЭГЪЧЗёдЫзЊе§ГЃЃЌвђДЫЃЌИУЯдПиЯЕЭГЪЧВйзїШЫдБСЫНтЕМКНЯЕЭГЕФживЊДАПкЁЃИУЙпЕМЯЕЭГВЩгУPC104зїЮЊЕМКНЪ§ОнДІРэМЦЫуЛњЃЌЫќдкНгЪеЕНГѕЪМВЮЪ§КѓНјаааЃбщЃЌШЛКѓНЋГѕЪМВЮЪ§ДЋШыжїЬхЕМКНЯЕЭГЃЛЭЌЪБЖджїЬхЕМКНЯЕЭГДЋЫЭРДЕФдЪМВЮЪ§НјааНтЫуЕУГізюКѓЕФЕМКНВЮЪ§ВЂДЋИјЕМКНДЅУўЯдЪОЦїЁЃЦфШэМўВПЗжВЩгУMicmsoft Visual C++БраДЃЌвдБугкМцШнWin98ЃЏ2000ЃЏXPЯЕЭГЁЃЕМКНДЅУўЯдЪОЦїгыЕМКНЪ§ОнДІРэМЦЫуЛњВЩгУRS-232ДЎПкЪЕЯжЫЋЯђЭЈаХЃЌВЈЬиТЪбЁгУ115200ЁЃећИіЯдЪОПижЦЯЕЭГНсЙЙПђЭМШчЭМ1ЫљЪОЁЃ 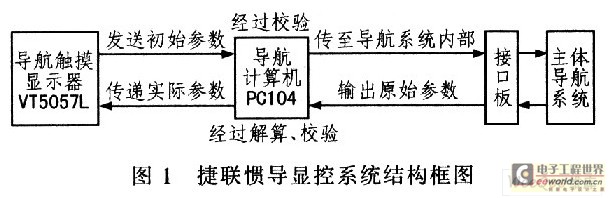 2 НнСЊЙпЕМЯдПиЯЕЭГЩшМЦ 2ЃЎ1 гВМўЕчТЗЩшМЦ ЕМКНДЅУўЯдЪОЦїгЩVT5057LаЭЕЅЩЋДЅУўЦСКЭ24 VжБСїЕчСїдДзщГЩЃЌVT5057LЬсЙЉ1ИіRS-232ДЎПкПЩгыPC104СЌНгЁЃVT5057LДЅУўЦСЕФНгЪеКЭЗЂЫЭОљЪЧеыЖд4зжНк32ЮЛИЁЕуЪ§ЖјбдЃЌИУДЅУўЦСга2жжЯдЪОФЃЪНЃК1)НЋЫљашвЊЪ§ОнШЋВПЬюТњЛКГхЧјКѓВХЯдЪОЃЛ2)ВЛБиШЋВПЬюТњЛКГхЧјЃЌжЛвЊЖдгІЕижЗгаЪ§ОнБуЯдЪОЃЛгЩгкЭЈбЖЕФЪЕЪБадетРябЁгУКѓепЁЃ ЕМКНЪ§ОнДІРэМЦЫуЛњгЩЧЖШыЪНPC104ФЃПщКЭНгПкАхзщГЩЁЃPC104ФЃПщЬсЙЉ1ЬѕISAзмЯпЃЌНгПкАхЭъГЩМЄЙтЭгТнКЭМгЫйЖШМЦаХКХзЊЛЛЃЌЭЈЙ§етЬѕзмЯпгыPC104ФЃПщМфНјааЪ§ОнДЋЫЭЁЃМЄЙтЭгТнЪфГі2ТЗЯрВюЮЊ90ЁуЕФЗНВЈаХКХЃЌМгЫйЖШМЦЪфГіГЩБШР§ЕФЕчСїаХКХЃЌЖўепОљашвЊМјЯрНтЕїКѓВХФмЪЙгУЁЃетРяВЩгУIЃЏFБфЛЛНЋМгБэЕФЕчСїаХКХзЊБфГЩТіГхаХКХЃЌдйЪЙгУ8254ЖдТіГхаХКХМЦЪ§ЕУЕНЪ§зжаХКХЃЌДЫЭтгЩгкЕМКНШэМўЕФжДааЦЕТЪНЯИпЃЌвђДЫНгПкАхЩЯЛЙашИНМгСЫ1Иі8254ЖЈЪБЦїзїЮЊЭтВПЖЈЪБЦїЁЃИУЯЕЭГНгПкАхВЩгУHCTL2020ЦїМўЭъГЩвдЩЯЙЄзїЃЌИУЦїМўФкВПМЏГЩга4БЖЦЕЕФНтТыЕчТЗЁЂ16ЮЛМЦЪ§ЦїКЭТЫВЈЦїЃЌЦфФкжУТЫВЈЦїФмЙЛгааЇНЕЕЭдыЩљЃЌЭМ2ЮЊНнСЊЙпЕМЯдПиЯЕЭГЕМКНМЦЫуЛњПђЭМЁЃ 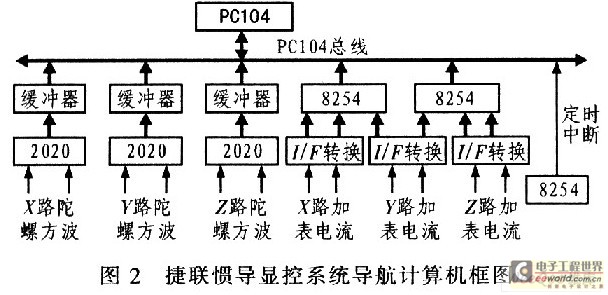 НгПкАхИКд№гыжїЬхЕМКНЯЕЭГСЌНгЛёЕУдЪМЪ§ОнЃЌPC104ФЃПщИКд№НгЪеДЅУўЦСДЋЫЭЙ§РДЕФГѕЪМВЮЪ§ЃЌВЂОЙ§аЃбщКѓДЋЫЭжСжїЬхЕМКНЯЕЭГЃЌжїЬхЕМКНЯЕЭГЙЄзїКѓАбЕМКНдЪМВЮЪ§ДЋжСPC104ЃЌетЪБЫќЖдДЋРДЕФВЮЪ§НјааНтЫуЃЌОЙ§ЮѓВюВЙГЅаое§КѓНЋЦфДЋЫЭИјVT5057LЁЃЖўепЕФЭЈаХавщШчЯТЃКДЎПкЃЌCOMlЃЛВЈЬиТЪЃЌ115200ЃЛаЃбщЮЛЃЌNONEЃЛЪ§ОнЮЛЃЌ8ЃЛЭЃжЙЮЛЃЌ1ЁЃ 2ЃЎ2 ЕМКНЯдЪОЦїШэМўЩшМЦ ЕМКНЯдЪОЦїЕФШэМўЩшМЦВЩгУAutofaceБраДЃЌетПюШэМўЪЧФЃЗТMicrosoft Visual C++ФЃЪНБраДЕФЃЌФкВПЧЖШыКмЖрЙІФмЛЏФЃПщЃЌГЬађдБЭЈЙ§БраДФЃПщЕФКъУќСюЪЕЯжЯргІЙІФмЁЃЕБДЅУўИУЦСФЛЕФБэУцФЃПщЪБЃЌДЅУўЦСНЋздЖЏжДааЖдгІЕФКъУќСюЁЃКъУќСюжЎМфгагХЯШМЖжЎЗжЃЌЭЈЙ§ЩшЖЈгХЯШМЖПижЦУќСюжДааЕФЯШКѓЫГађЁЃЕМКНЯдЪОЦїЕФШэМўЯЕЭГИКд№ЖджїЬхЯЕЭГЗЂЫЭЙЄзїУќСюЃЌЗЂЫЭНзЖЮСїГЬШчЭМ3ЫљЪОЁЃЭМ4ЮЊЕМКНЯдЪОЦїЕФЪЕМЪЗЂЫЭНчУцЁЃ 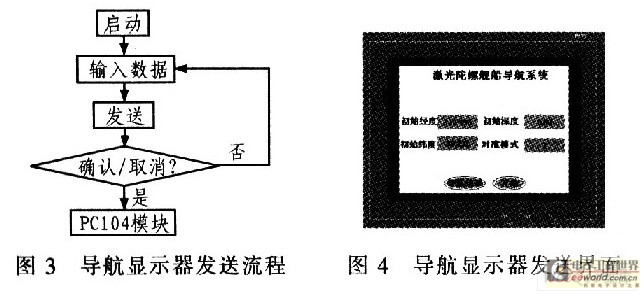 гЩгкVT5057LЕФФкДцНЯДѓВЂЧвФкВПгаЕЅЖРЕФCPUЃЌЫљвдИУШэМўПЩвдЪЕЪБЯдЪОPC104ДЋЫЭЙ§РДЕФЪ§ОнЃЌМИКѕУЛгабгГйЁЃЕБЪЕМЪЙЄзїЛЗОГЖёСгЛђДЎПкДЋЪфЙ§ГЬжаЛсВњЩњЮѓТыЃЌЫљвддкГѕЪМНзЖЮМгЩЯСЫЬиЪтзжЖЮаЃбщКЭаЃбщКЭЃЌдкДЋЪфЪБДЋЫЭ2БщЃЌдкPC104ШэМўВПЗжНјааЯргІЕФаЃбщЃЌвдБЃжЄЭЈаХе§ШЗЁЃЗЂЫЭКъУќСюДњТыШчЯТЃК 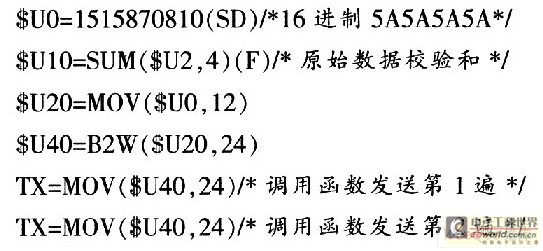 жїЬхЕМКНЯЕЭГНгЪеЕНЙЄзїУќСюКѓЛсе§ГЃЙЄзїЃЌЭЌЪБДЋЪфдЪМЕФЕМКНВЮЪ§ЃЌетЪБPC104НгЪеетаЉЕМКНВЮЪ§ВЂНјааВЮЪ§НтЫуЃЌНтЫуКѓНЋЪЕМЪВЮЪ§ДЋИјVT5057LЃЌДЅУўЦСЕФЯдЪОНзЖЮСїГЬШчЭМ5ЫљЪОЁЃЭМ6ЮЊЕМКНЯдЪОЦїЪЕМЪНгЪеЕФЕМКННсЙћЁЃЮЊСЫЯћГ§ЛЗНквђЫивдМАЭЈаХЮѓТыЖдPC104КЭVT5-057LжЎМфЕФДЋЪфВњЩњгАЯьЃЌдіМгСЫаЃбщЙІФмЃЌЯдЪОНзЖЮКъУќСюДњТыШчЯТЃК 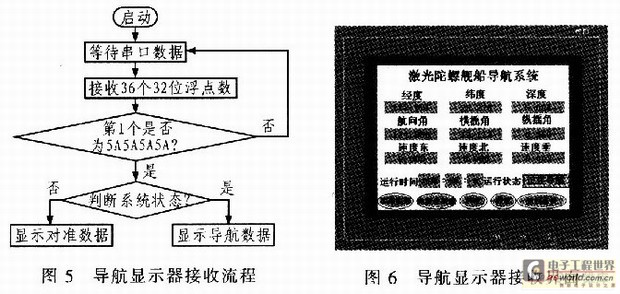 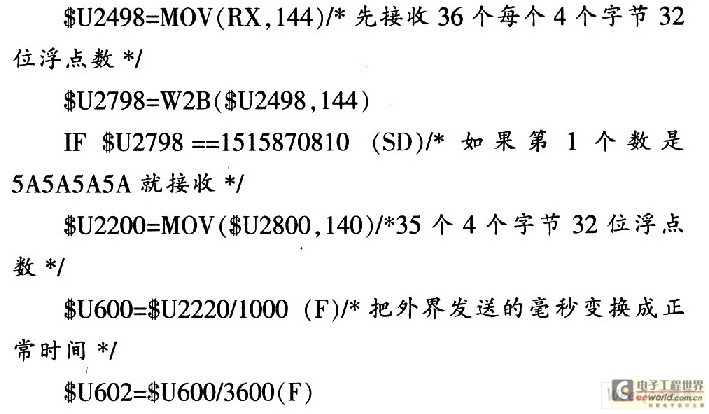 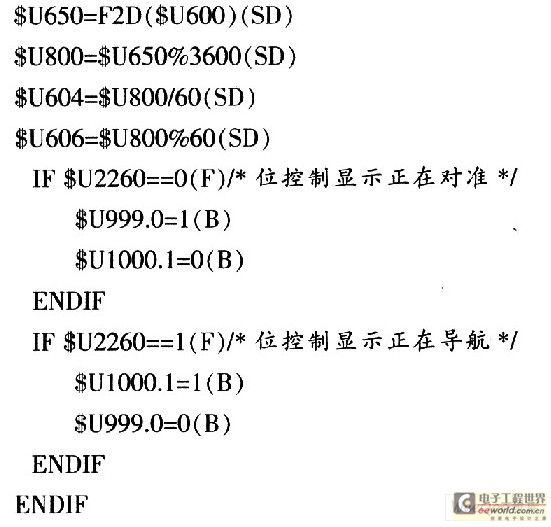 ЁЁ ЕМКНЪ§ОнДІРэМЦЫуЛњЕФШэМўВЩгУVC++БраДЃЌдкDOSЯТЪЙгУTC3ЃЎ1ЕїЪдЁЃгЩгкЪЕМЪЕФеНГЁЛЗОГПЩФмБфЛЏЮоГЃЃЌећИіЯЕЭГЕФЪ§ОнЭЈаХСПгжЗЧГЃДѓЃЌжїЬхЕМКНЯЕЭГКЭЯдПиЯЕЭГЖМПЩФмГіЯжИїжжЮЪЬтДгЖјЕМжТЪ§ОнДЋЪфГіДэЃЛЮЊСЫЗРжЙДЫРрЪТЧщЕФЗЂЩњЃЌдкЕМКНМЦЫуЛњФкВПвВдіМгСЫЪ§ОнаЃбщЛЗНкЃЌЗЂЫЭКЏЪ§ДњТыШчЯТЃК 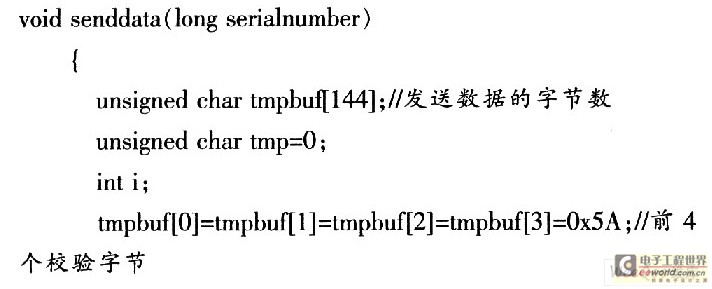  3 НсТл БОЮФЩшМЦСЫвЛжжЛљгкДЅУўЦСКЭPC104ЕФЯдПиЯЕЭГЃЌИјГіСЫPC104МЦЫуФЃПщЕФПђМмНсЙЙКЭДЅУўЦСМАЕМКНМЦЫуЛњШэМўБраДСїГЬЃЌЖўепЭЈЙ§RS-232ДЎПкЫЋЯђЭЈаХЃЌОЙ§4000аЁЪБВЛМфЖЯВтЪдЃЌЪ§ОнЯдЪОвРШЛе§ГЃЁЃИУЯдПиЯЕЭГЬхЛ§аЁЁЂжиСПЧсЁЂПЩППадИпЃЌПЩгІгУгкКЃОќНЂЭЇЙпЕМЯЕЭГЁЃ |
ЭјгбЦРТл