
一种改进型太阳阵最大功率点跟踪方法
发布时间:2009-8-20 10:09
发布者:贾延安
|
迄今为止,绝大多数卫星电源都采用太阳阵加蓄电池的供电方式。光照期间,太阳阵一方面为整星载荷提供能量,另一方面对蓄电池进行充电;蓄电池则负责在阴影期或峰值功耗时释放存储的能量为载荷供电。根据太阳阵的V-I曲线可知,在任一特定的条件下,太阳阵都有一最佳工作点,在此工作点太阳阵输出的功率最大。 目前,国内卫星均采用直接能量传输方式(DET),在此方式下,电源系统将太阳阵输出的能量直接提供给星上载荷。但由于受光照强度、温度以及使用年限等因素的影响,太阳阵输出电压、电流将不断衰减,直接能量传输方式未对太阳阵的最大功率点进行跟踪,这势必造成太阳阵输出能量的浪费。本文针对这一现象,提出一种基于太阳阵最大功率点跟踪方式(Maximum Power Point Tracking,MPPT),通过在太阳阵输出环节增加一辅助电路,将太阳阵工作点维持在最大功率点,极大地提高太阳阵利用效率。 MPPT理论简介 MPPT本质上是一个用作阻抗匹配的DC/DC电路,通过控制DC/DC电路对整星阻抗进行匹配。鉴于太阳阵的光伏特性受到外界诸多因素影响(光照强度、温度等),其输出特性呈现非线形特征,为了问题的简化,太阳阵的模型可以看作是一个直流电源和一个电阻的串联,其中电阻是一个受到外界因素(光照、温度、辐射等)影响的可变电阻。这样,当外界因素发生变化时,势必造成可变电阻阻值的波动,进而影响太阳阵输出特性。利用DC/DC电路所构成的MPPT功能电路(图1),图中R表示任一时刻整星的等效载荷。 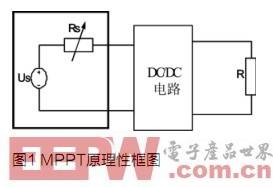 虽然太阳阵和DC/DC电路是非线性的,然而在极短时间里,可以作为线性电路处理。根据戴维宁定理可以将方框外的电路等效为一个阻抗,假设此阻抗为Req,则任一时刻此等效阻抗Req上得到的功率为: 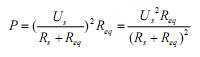 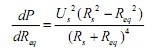 等式两边对Req求导并化简得: 当分子为零时,亦即Req等于Rs时,太阳阵将输出最大功率,假设DC/DC电路为理想电路,不存在能量的消耗,则载荷上将得到最大功率。所以欲使任一时刻载荷获得最大功率,需要一个能够对整星阻抗进行匹配的DC/DC电路,通过此电路对整星阻抗重新匹配,使得其尽可能逼近太阳阵模型中的等效阻抗Rs。 目前,常用的DC/DC电路有降压斩波电路、升压斩波电路、升降压斩波电路、Cuk电路以及正、反激电路。假设上述几种电路都为理想电路,则它们的等效输入阻抗分别如下(a为开关器件的占空比,0 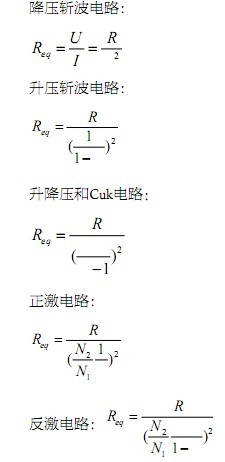 由上式可知,降压斩波电路无论如何变化,电路的等效输入阻抗总是大于有效载荷R;升压斩波电路则刚  这样,最大功率点的跟踪就可以转化为DC/DC电路占空比的控制问题,通过占空比的调制,使得星上载荷获得最大功率。由于星上某一时刻实际工作载荷阻抗的不确定性,DC/DC电路必须具备双向性调节(既可以增大等效输入阻抗,亦可以减小等效输入阻抗)。虽然相关文献中[2,3],DC/DC电路有采用降压斩波电路和升压斩波电路,但是根据上述分析可知,这两种电路有其自身的局限性的(当R>Rs,降压斩波电路将无法匹配整星阻抗,使得Req=Rs,以期太阳阵输出功率最大;升压斩波电路类似)。所以鉴于星上某一时刻实际工作载荷的不确定性,DC/DC电路应选择采用反激电路、升降压电路或Cuk电路为佳。 MPPT理论的实现 目前最大功率点控制方法很多,常用的有恒压跟踪法(CVT)、扰动观察法以及增量电导法(INC)。恒压跟踪法是一种建立在外界温度恒定前提下近似最大功率跟踪方法,鉴于此种控制方法的局限性,不适合用于星上太阳阵控制;增量电导法是利用太阳阵输出端动态电导值dI/dV,与此时静态电导的负数-I/V相比较,控制太阳阵输出电压方向的一种最大功率点控制法。当传感器精度有限时,满足dI/dV=-I/V的概率有限,将不可避免产生误差。 扰动观察法具有控制方式简单的优点。常规扰动观察法是通过计算机周期性地采集太阳阵输出电压和电流,计算出输出功率,并和上一次输出功率进行比较,根据比较结果控制DC/DC电路。经过反复比较、控制,最终使得太阳阵工作在最大功率点附近。太阳阵在最大功率点振荡的幅度取决于系统的采样周期和执行时间。过大的采样周期虽然可以提高跟踪速度,但跟踪过程中有可能会跨越最大功率点,最终会在最大功率点处振荡,造成平均输出功率大大低于最大功率,甚至无法跟踪到最大功率点。过小的采样周期,会对硬件电路提出更高的要求,不利于元器件的选取和增加系统的研制成本,而且,从系统的动态响应性角度考虑,如果某一时刻太阳阵的实际功率点偏离最大功率点过远,过小的采样周期将需要花费更多的时间才能跟踪到位。所以常规扰动观察法首先面临着跟踪步长选取难的问题。 此外,当外部环境快速变化时,常规扰动观察法不能快速跟踪,很容易造成误判现象。例如,当太阳阵已经工作在最大功率附近,假设此时对应的占空比为Da,对应输出功率为Pa(图2),当占空比扰动方向向右移动时,若日照强度没有发生变化,则太阳阵输出功率Pb>  a,占空比扰动方向正确。但倘若光照强度突然降低时,则对应Vb的输出功率Pb` a,占空比扰动方向正确。但倘若光照强度突然降低时,则对应Vb的输出功率Pb`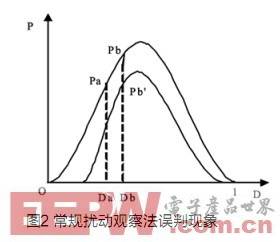 所以,根据现有理论和上述常规扰动观察法存在的缺点,本文提出一种鉴于三点比较理论的变步长控制方法,通过对DC/DC占空比的控制,实现对太阳阵最大功率点的快速跟踪、定位。 首先在太阳阵的P-D曲线不同位置,从左向右任意取三点a、b、c,对应的输出功率和占空比分别为Pa、Pb、Pc和Da、Db、Dc(图 3)。先引入一个符号变量S,对于a、b两点,若Pa≥Pb,则S=-1,否则S=1;对于b、c两点,若Pc≥Pb,则S=1,否则S=-1。这样,以 b点占空比Db为基准,Da=Db-l,Dc=Db+l。每一个采样周期里,比较三点计算所得功率的大小,进而得到符号变量S的值,根据S决定占空比移动方向。 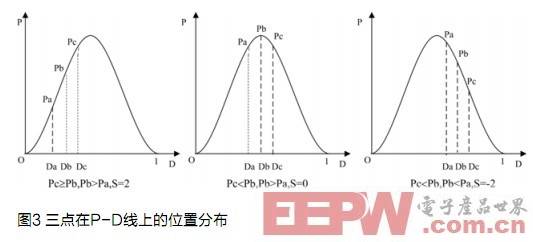 由图3可知,当S=0时,工作点将不移动;当S=2时,工作点将向右移动;当S=-2时,工作点将向左移动。现在回顾上面所提及的常规扰动观察法中,太阳阵误判情形:Pb≤Pa,Pb≤Pc,此情形下S=0,工作点将保持不变,这样就可以有效地避免光照快速变化时所引起的误判现象。 变步长控制策略设计成一个子程序。首先根据三点比较法可以确定a、b、c的大概位置(相对与最大功率点而言),然后设定一个系统可以接受的最小占空比变化率(假设此值为min a),下面以三点在最大功率点左边来阐述变步长控制策略。刚开始时,控制系统以一个较大步长的占空比变化率来调整。假设某一时刻系统占空比为D(n),如果Pc-Pb≥e(e为一个很小的正数),则保持原来的占空比变化方向和步长变化率λ;如果0≤Pc-Pb 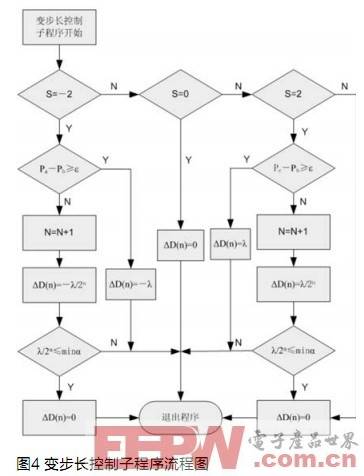 在MPPT控制子程序中,判断P是否为零,可以实现当卫星进入阴影期时,计算机放弃对DC/DC电路的控制权。光照期计算机通过定时程序,每隔一定的时间调用一次MPPT控制子程序进行最大功率点跟踪,一轮最大功率点跟踪到位的依据是DD(n)=0。当卫星由阴影期进入光照期时,通过采样太阳阵从阴影期进入光照期输出电流的变化,结合硬件电路产生计算机外部中断,来启动定时程序。 结语 本文对MPPT理论作了较为系统地阐述,对几种常用的DC/DC电路展开讨论,进而得到MPPT控制中DC/DC电路选取的依据,并且针对恒压跟踪法的局限性,增量电导法对采样电路的依赖性以及常规扰动观察法容易在最大功率点附近振荡,造成能量损失,而且在光照快速变化时还容易引起误判等情况,提出一种基于三点比较的变步长控制方法,它不但可以克服光照快速变化时的误判和最大功率点处的振荡现象,而且可以实现对最大功率点的快速跟踪、定位。 星上太阳阵MPPT理论的提出,不但对减小卫星太阳阵的面积和重量,降低生产和发射成本起到积极的意义,而且可以优化卫星电源系统的设计。 |



网友评论