
通用变频器中基于DSP的数字控制器实现
发布时间:2010-9-14 16:08
发布者:techshare
|
变频调速系统的关键,就要没计一个合理的变频器,而它的核心就是变频调速系统的数字控制器。变频器的数字控制器包括信号的检测、滤波、整形,核心算法的实时完成以及驱动信号的产生,系统的监控、保护等功能。 变频器数字控制系统的硬件部分,包括微处理器、接口电路及外围设备,其中微处理器是系统的控制核心,它通过内部控制程序,对从输入接口输入的数据进行处理,完成控制计算等工作,通过输出接口电路向外围发出各种控制信号,外围设备除了检测元件和执行机构,还包括各种操作、显示以及通信设备。 本文采用TI公司的TMS320F240自行设计了一款用于高速电机调速系统的数字控制器,频率可以通过键盘数字给定或者模拟给定,同时对它的功能和技术做了简要的分析,并给出了电机在18000r/min稳态运行时控制器的输出波形。 1 数字控制器的硬件结构框图和工作原理 数字控制器的硬件以TMS320F240定点DSP为CPU,CY7C199为外部数据和程序存储器,数据和程序存储器各32K;16路的模拟/数字输入通道,其中一路可以用来进行模拟频率给定;使用了8位数字I/O口,可以用键盘通过I/O口来进行数字频率给定;4路12位的数字/模拟转换通道,用于电机输出信号控制;RS232和SPI系列兼容接口,其中将SPI用作变频调速时电机频率的LED显示,将SCI口扩充成RS232接口,其功能布置框图如图1所示。 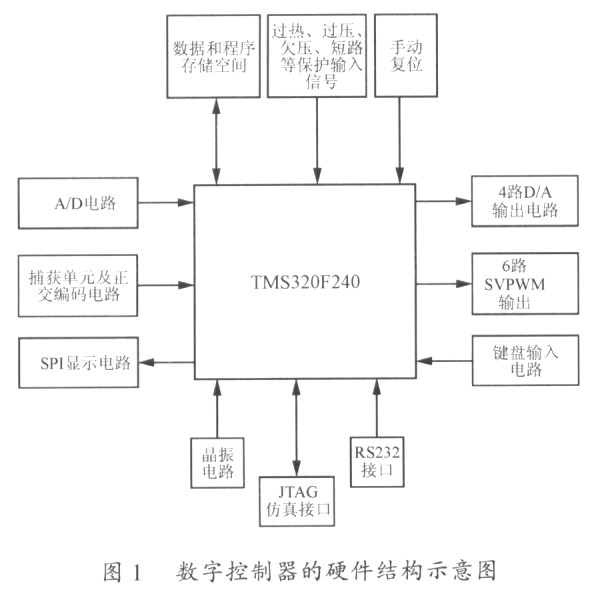 电机或者逆变器的工作频率通过键盘给定,同时,其频率显示通过DSP内部的显示程序回显在LED上,当按下运行键以后,键盘设计频率被送到产生空间电压矢量的SVPWM处理子程序,生成的SVPWM波形通过GAL器件保护后输出,与此同时,电动机或者变频器的实时运行动态频率通过LED显示。正交编码脉冲可以接入电机的光电编码器,对系统构成速度环反馈,A/D模块可以接入电机的电流环,至于变频调速系统的保护中断源由DSP的引脚PDPINT提供,主要是过压、过流、控制电压欠压、过热等中断源。电机的速度或者逆变器的输出频率可以通过键盘改变。 2 硬件设计 数字信号处理器是数字控制器的核心部分,也是数字控制器对信号的检测、滤波、整形,核心算法的实时完成以及驱动信号的产生,系统的监控、保护等功能的核心部分。数字控制器的功能模块设计如下。 2.l 数据和程序存储器的设计 DSP是一种高速存取器件,对于外围接口芯片有较高的要求,虽然DSP本身可以软件提供0"7个等待状态来满足与片外存取器件速度的匹配,但是为了不至于影响整个系统的控制和仿真功能,一般采用存取速度比较高的存储器来做为DSP的片外数据和程序存储器。本文采用CY7C199存储器,存取时间15ns,完全不用提供软件等待状态也不用加硬件等待电路,因为,CY7C199是32K的8位存储器,所以,使用了4片该存储器组成了32K的16位存储器RAM,数据和程序各32K。 2.2 DSP复位及时钟电路的设计 为了使系统被复位信号正确地初始化,对复位信号的脉冲宽度必须有一定的要求。对于TMS320F240而言,复位信号至少要lms。不过上电之后,系统的振荡器达到稳定工作状态需要20ms甚至更新的时间,一般来说上电复位时,在复位引脚上置100"200ms的一个低电平脉冲是比较合适的。根据这一原则,采用MAXIM公司的集成微处理器监控复位电路来完成,本文使用了MAX705。MAX705监控芯片,与传统的分立元器件组成的微机监控电路比较,它的可靠性高、动态响应好,功耗小、设计简单、体积小,在电子产品设计中已得到广泛的应用。 在设计中,时钟往往不被充分地重视,其实,时钟是电路设计中非常重要的一个环节。DSP时钟既可由外部提供,亦可由板上的振荡器来提供。由于DSP及其它芯片工作都是以时钟为基准的,如果时钟质量不高,那么系统的可靠性、稳定性就很难保证。本文采用外部时钟输入,由有源晶振产生10MHz脉冲,通过覆铜和串接LC滤波电路来抑制外界干扰,保证了系统的稳定工作。 2.3 RS232的串行口电路设计 RS232是美国电子工业协会于1960年发布的串行通信接口标准,目前应用广泛的是RS232C和RS232D。 RS232C的标准连接为DB25.但在实际应用中采用非标准的DB9连接,实际应用中根据需要对定义的引脚进行取舍。RS232C电气特性最大的特点是采用了负逻辑,逻辑l的电平是一3V一一15V,逻辑0的电平是+3V"+15V,因此,在使用中有一个电平转换接口的问题。本文中采用自升压的集成芯片MAX232C来构成,只由+5V电源来供电,电平转换所需的±10V电源由片内电荷泵产生。在控制器做好以后,进行了计算机的串行通信接口(SCI)检验,数据通信收发正常,能够稳定工作。 2.4 D/A输出功能块的设计 在数字控制系统中,D/A和A/D电路是必不可少的,根据各种运用场合不同,系统对D/A、A/D的速度要求也不一样。本文中使用的是并行输入的D/A芯片DAC7625,它是12位数据并行输入,4路模拟输出的D/A转换器。其建立时间是10μs,功耗20mW,电源可以采用单电源+5V和双电源±5V供电,广泛应用于电机控制和数据采集等。数模转换器DAC的数据输入来自DSP的高12位,通过74LS245送到DAC7625的数据端,采用单电源+5V供电,参考电压VHEFH使用精密稳压器件提供的+2.5V,VHEFL模拟地,其输出通过运算放大器TLCH2272进行放大,输出范围为0"+5V。 2.5 键盘输入接口电路和LED显示电路设计 键盘和七段LED显示器是微型计算机系统最常用的输入、输出没备。它是实现人机之间进行信息交换的主要通路。键盘的功能就是把人们要处理的数据、命令等转换成计算机识別的二进制代码,即计算机能识别的符号;七段LED显示器则是把计算机的运算结果、状态等代码转换成为人们能识別的符号显示出来。键盘是计算机系统的主要输入没备,特別是在微处理器中,键盘设汁成为必然。本文在设计时考虑到DSP处理速度的快速性,对于键盘去抖动环节,采用了硬件延时电路,具体电路如图2所示。  七段LED显示器有静态显示和动态显示两种连接方式。动态扫描方式节省硬件,常用的BCD七段译码驱动和动态扫描驱动电路有两种,如Intel 8279、Max 7219等,控制器中采用MAX7219芯片。DSP具有一个与外设打交道的串行接口SPl,这为串行接门显示提供了方便。MAX7219足一种串行的共阴极LED数字显示驱动器,内没多个控制和数据寄存器,其工作方式可通过编程灵活地设计,它是体积小、功能强大、使用灵活方便的串行接口。应用中需要注意的问题就是,MAX7219抗,EMI能力比较差, 相对而言用MAX7221比较可靠一点。另外一个问题是,说明书中虽然说寄存器可以使用任意数字,比如说数据格式中的高4位用的是XXXX来表示,但是,在实际应用中最好使用非零位,本文采用1111来表示,可以增加抗干扰能力。另外,在串行数据线和电源中必须加适量电容,以提高抗干扰能力,特别是电源尤其要注意,如果波动比较大的话,MAX7219比较容易损坏。 2.6 SVPWM脉冲输出模块的设计 空间电压矢量SVPWM脉冲输出是数字控制器中的关键部分,电机调速或者逆变器的频率就是由SVPWM波形来控制的。为了防止逆变器的上下桥臂直通,虽然在DSP内部编程可以加入死区吋间,但是用微处理器产生的SVPWM脉冲可能由于程序跑飞而造成控制混乱,为安全起见,采用GAL器件做了互锁保护电路,防止逆变器同一桥臂上下器件的直通,数字控制器中使用的是Lattice公司的GAL16V8。 3 软件设计 随着变频器产品的不断成熟,它的功能也不断丰富,可靠性也得到不断提高,从而导致了其程序编制的复杂度和难度。本文设计的变频调速系统是针对实验室无轴承高频电机用,主要完成了一些基本功能,比如频率的设定与显示,低速时转距补偿功能等,程序不是特别复杂,设计程序近2000行,廾对程序进行了测试,证明程序运行良好。本文变频调速系统中的整个程序主要由主程序、键盘程序、显示程序、PWM程序、故障保护中断程序等组成。 3.l 主程序和故障保护中断程序 主程序是整个程序的最主要部分,它完成了变频器的主要功能,它的流程图如图3(a)所示。程序初始化部分主要包括:I/O口的初始化,波形发生器的初始化,定时计数器的初始化,SPl的初始化,MAX7219的初始化等。读数到内部寄存器,就是把常用的数据读人到内部寄存器,缩短DSP处理时间,更好地实现实吋性。设定频率处理,就是判断按键所给定的值,判别所设定的频率谁是最终的目标频率。频率显示部分,就是把最终目标频率,按常规以千位、百位、十位、个位通过LED显示出来。运行控制就是根据RUN键来决定是否启动电机运行。在硬件设计上,采用的是富士公司的第三代智能功率模块IPM,它的内部本身就集成厂过压、过流、过热、控制电压欠压、短路等的输出报警功能,通过光耦隔离后送入到DSP的外部中断源引脚PDPINT,完成相应的保护功能,具体流程图如图3(b)所示。 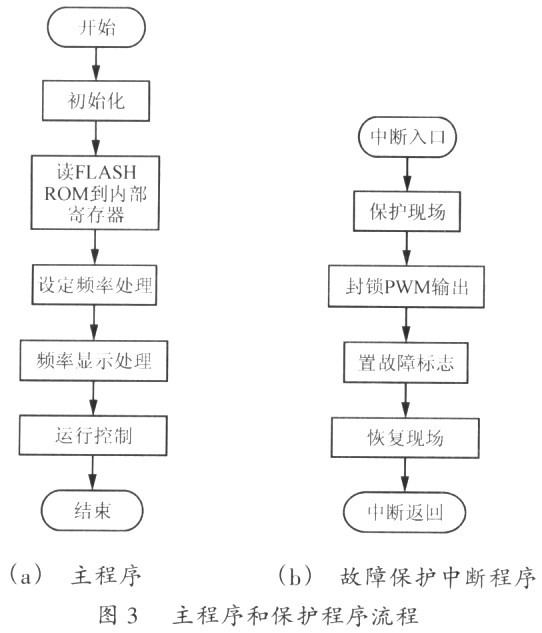 3.2 SVPWM中断子程序 PWM 中断子程序是整个控制器工作的关键程序,空间电压矢量调制的完成就是靠它来实现的,具体的流程图如图4所示。PWM发生程序主要完成如下的功能:电机运行时频率的动态显示,根据主程序中所给定的目标频率,可以得到角速度ω,ω经过积分运算可以得到usref的角度θ,然后计算usref在两相静止坐标系α,β轴上的投影usα及usβ,有了θ可以同时计算出参考电压矢量所在的扇区/N,根据已知量由公用值求取两相邻电压矢量的作用时间T1、T2和T0,然后给DSP内部的3个全比较寄存器CMPRx(x=1,2,3)进行赋值,产生相应的5VPWM波形。  4 实验结果 根据前面介绍的系统硬件电路和软件控制算法,对制作的原理样机进行了实验研究。实验测试了异步电动机空载稳态运行情况,以此来检测原理样机的可行性,对实验结果进行了波形记录,300 Hz稳态运行时其PWM控制波形和测得的异步电机实测线电压波形如图5所示。 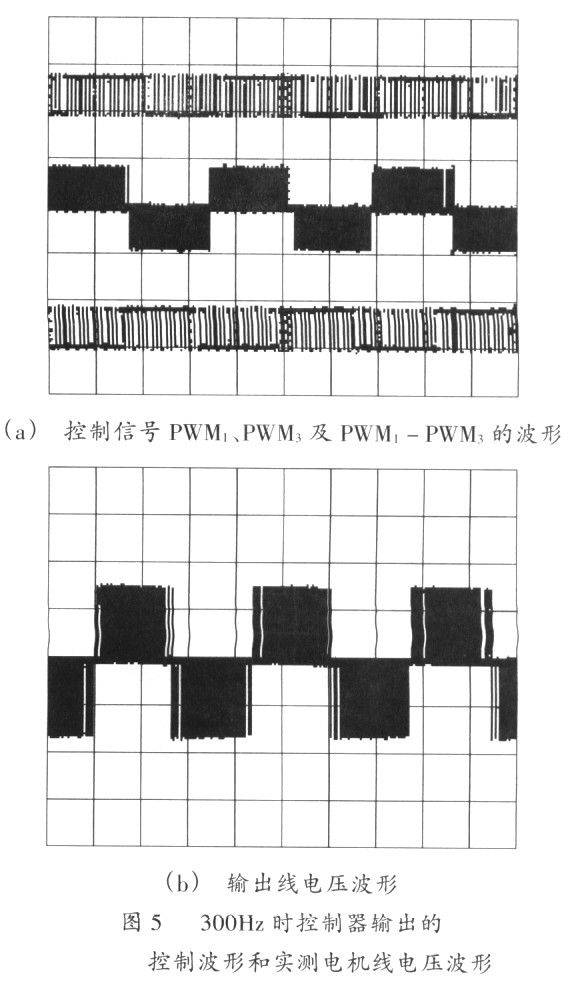 实验用高频电机的参数如下: 额定电压Un=220V,额定电流In=1.5A,额定频率f=400Hz,异步电机的极对数=1,额定功率Pe=800W,额定空载电流0.75A。 5 结语 以TMS320F240数字信号处理器为核心构成的数字控制器是一个信号处理系统,该系统可以完成信号的检测、滤波、整形,核心算法的实时完成以及驱动信号的产生,系统的监控、保护等功能,相对于一般的单片机构成的系统,它的处理速度快、实时性能比较好,也易于选择和配合,同时集测量、监控、保护于一身,可与上位机通信,具有很高的使用价值。 |



网友评论