
用MSP430单片机实现微波成像系统的扫描控制与数据采集
发布时间:2009-6-20 07:21
发布者:MSP430
|
在无源微波遥感中,微波辐射计是一种获取场景微波特征的重要手段。微波辐射计通常是一部超外差接收机,通过接收被测场景在一定频带内的电磁辐射,转换为输出的低频信号,来表征被测场景的地物信息。利用微波辐射计来探测、接收被测目标、背景在微波波段的电磁辐射,并把接收到的辐射信号按比例用伪彩色图像直观地显现出来的系统称为微波辐射成像系统。 微波辐射成像系统要求在恶劣的环境和天气下长期稳定地进行天线扫描成像,所以要求系统设备用于天线扫描控制及数据采集的电路尽量简单、稳定。基于以上的要求,采用了TI公司所生产的MSP430F149型超低功耗FLASH单片机作为这套系统的从机部分,该单片机有60KB的FLASH存储器和2KB的RAM存储器,可以在一台PC及JTAG控制器的帮助下实现程序的下载,完成程序调试。 系统总体结构及硬件设计 ● 系统整体结构 微波辐射成像系统的原理如图1所示。  系统采用主从式计算机进行工作,其中主机采用PC机进行人机对话以及实时成像,从机采用MSP430F149单片机进行步进电机的智能控制以及高速数据采集,主从机之间采用RS232串行通信端口进行通信。成像时,先由PC机送出命令参数,再由单片机根据命令发出相应的控制信号通过驱动放大电路进入电机,分别或者同时控制两台电机的转向与转速,使得辐射计天线进行自动扫描,同时辐射计将接收到的信号进行积分后输入到MSP430单片机集成的12位ADC的模拟信号输入通道,进行12位的A/D转换,然后由单片机通过串口发送程序送入主机存储并显示相应的伪彩色图像。 为了方便以后的软件升级,在电路中预留了JTAG调试口可以随时进行软件调试,并且将数据采集信号线,电机控制信号线和定位信号线统一用一个并行接口口输出,方便系统安装调试,从机部分硬件电路原理如图2。  ● 天线控制电路 使用MSP430F149的P1端口来控制两个电机,每次输出的是一个字节,它的高三位控制水平电机,中间三位控制纵向电机。由于控制电机驱动柜要求的驱动信号电平和信号电流比单片机I/O口输出的信号电平和电流都高,同时为了使单片机的输出电平不受驱动放大电路的影响,使用了两片光电耦合器TLP521为电机驱动电路提供驱动信号。 ● 数据采集电路 MSP430F149具有12位ADC,辐射计输出信号可直接送入该单片机进行12位A/D转换而无需外围扩展A/D转换芯片,多种不同的采样模式可以有效降低软件的复杂度。由于需要定时利用单个通道接收信号,因此采用单通道单次采样的模式进行数据采集。 ● 通信电路 MSP430F149与PC机的通信采用RS232串行通信总线,采用HARRIS公司生产的ICL232作为RS232电平转换芯片。 ● 定位电路 在微波成像系统中,为了防止电机的失步,保证天线扫描场景与PC机所成图像场景一致必须在单片机上外加定位电路,使得天线扫描一周后能够确定天线的零位,在天线的转台上安装一个撞针,并接单片机的P2.0端口,平时保持开路状态,P2.0端口保持高电平,当天线旋转至零位时,撞针与地线接触,发生短路,P2.0端口电平变为0V,单片机检测到电平发生跳变,使单片机产生中断信号,由此判定天线是否到零位。等效电路如图3所示。 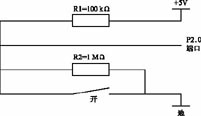 ● 电源电路 除MSP430F149外,其他芯片均需要电源提供+5V的电压才能工作。系统统一外接5V电源,用电压转换芯片EZ1085C-3.3将5V的电压转换为3.3V为单片机供电。 系统软件设计 ● 功能需求及流程 微波辐射成像系统的软件部分要完成的功能主要如下。 (1)实时进行微波扫描成像,要同时完成控制步进电机以一定的速度旋转;按一定的采样速率采集辐射计输出的电压值;实时在显示器上显示辐射成像系统扫描的场景的伪彩色图像;存储辐射图像到硬盘;打印辐射图像; (2)对已有的辐射图像重现、观察和分析; (3)对辐射计进行定标计算; (4)单独驱动步进电机以不同的方式运动。 其中MSP430单片机要完成的工作有:接收主机发送的命令参数,利用机内的定时器定时中断,中断处理程序决定是否驱动电机走一步或采样一点;要采样一点,从数据端口读入辐射计接收机的输出信号并进行A/D转换,要驱动步进电机走一步,对片上I/O端口发出一个驱动脉冲。以上的操作周期为毫秒级。单片机与PC机通过串行通信端口进行数据交换。 程序流程图如图4所示。 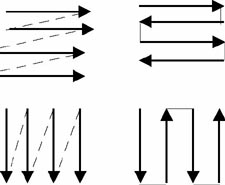 ● 天线扫描方式选择及实现 在微波辐射测量中,采用天线主波束扫描可以对所感兴趣的场景实现辐射测量成像。由于辐射计相对场景是固定的,故须采用二维机械扫描。 在二维机械扫描过程中,根据采样方式的不同,通常可以采用两种方式。 在钟摆扫描方式中,天线如钟摆一样在一维往返扫描,每条扫描线均进行采样,一行扫描完后,天线的另一维抬高一个角度继续扫描下一行,直到扫完全部区域。根据选用哪一维摆动以及回程是否采样,这种方式又以分为4种情况,如图5所示。其中方式a、c均为正程扫描采样,逆程不采样方式,其优点是各行(或列)之间没有机械齿距误差,但成像时间差不多是方式b、d的两倍,而方式b、d则有成像速度快,有齿距误差的特点,不过这种误差比较均匀,可以通过机械校正来弥补。 在圆周扫描方式中,通常是天线的水平一维以匀速进行旋转,在一定的角度范围内采样,每旋转一周后,纵向一维抬高一个角度。它的机械实现简便,有足够的时间和空间定标,由于扫描过程中不需要来回的加减速与换向过程,故扫描速度会有很大的提高。 由于两电机的转速,转动时机都不相同,因而保证它们的连续变相就十分重要,否则,电机的转动就不会平稳,容易损坏,因此要有精确的时钟定时装置对系统的电机控制和数据采集部分进行中断操作,才能使两台电机分别或者同时平稳的运行,采样位置准确。在程序中采用了MSP430单片机片内的16位定时器Timer_A进行定时中断,当程序运行时,首先根据主机发送的命令参数计算出扫描和采样所需要的定时时间,然后预置相应的定时器最大计数值(最大不超过65536),定时器从0计数至最大值时发生中断,进入中断子程序,根据程序设定的标志位mxy判断是水平还是垂直电机转动,如果要控制水平电机,则调用go_stepx(cw,direction_x)函数,该函数读出P1端口前三位,根据其值确定下一相的控制字cw,同时,该函数返回改变后的cw值,可供下一次调用。如果要控制纵向电机,则调用go_stepy(cw,direction_y)函数读出P1端口中间三位,它也返回改变后的cw值,然后驱动电机走一步,执行完毕后返回主程序。当电机走过相应的采样步数后,程序发生中断,进入采样处理程序。 数据采集模块设计 采样处理程序开始运行时,首先将ADC12控制寄存器中的ADC12SC和ENC置位,将输入信号送入采样保持电路,然后将ADC12SC复位,停止采样,启动A/D转换,将模拟信号转换为12位数字信号并存入选择的转换存储寄存器,单片机通过片内的异步通用串行模块将转换结果送入主机内进行实时成像处理。 结语 本系统将天线控制及数据采集部分和实时成像部分分离,并且采用了高度集成的MSP430F149芯片,减少了线路损耗,简化了系统结构,从而降低了成本并且提高了系统运行的稳定可靠性。 |




网友评论