
经济高效的矢量控制驱动
|
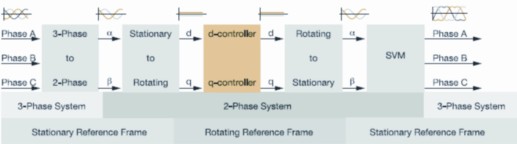
简介 由于能效、环境问题及遵守新的能耗规定的必要性,对节能型工业和家用电器的需求最近也在攀升。这些规定迫使人们为洗衣机、空调压缩机系统和风机等电器开发节能电机。据估计,电动机消耗的电力占工业应用消耗的总电力的70%以上,美国电力研究协会研究显示,超过60%的工业电机以低于它们的额定负荷容量运行。 交流感应电机(ACIM) 在工业和消费电子中的流行有很多原因(见图1)。它们非常简便(它们没有刷子),不但制造成本低,而且功能强大,几乎不需要维护。它们的生产已经有一些年 头,因此它们的构造极度优化。在过去,这类电机的运行一直不需要速度控制,而且为了达到理想的结果,频繁启动和停止。这一过程使用的大约50%的电力都被 浪费。 现在,人们在考虑很多新的减少ACIM的电力消耗的方法,包括新的电机效率技术。利用模拟电机电路的数字控制,系统成本和功耗可以大大降低。本文描述了基于飞思卡尔MC56F8013/23数字信号控制器(DSC)的三相AC感应电机矢量驱动解决方案,为消费和工业电机驱动充分利用经济高效的解决方案的优势。 图1 电机总览 图2 矢量控制变换 三相交流感应电机 ACIM是旨在从三相交流电源中运行的旋转电机。每个定子的内部外设中的插槽都包含一个三相绕组。每个绕组中的顺序都进行分配,这样定子绕组中 的电流就在气隙的外设周围产生一个近似正弦曲线分布的磁通密度。当时间呈正弦曲线分布、但又以120度交错放置在相位中的三个电流流经三个对称放置的绕组 时,就会产生放射状气隙绕组磁通密度,它们也呈正弦曲线分布在气隙周围,以相当于定子电流角频率的角速度旋转。 最常见的感应电机类型有一个鼠笼转子,其中,铝导线或铝条铸入转子外设的插槽中。转子的两端均使用铸铝端环形成铝导线或铝条短路,铸铝端环也可 用作风机。因为正弦曲线分布磁通密度波由定子励磁电流掠过转子导线产生,所以在导线中产生电压,最终产生短路转子条中的正弦曲线分布电流。因为这些短路铝 条具有低电阻,所以只要求磁通波的角速度和两极转子的机械角速度之间的相对较小的角速度来生成必要的转子电流。相对角速度叫作滑流速度。正弦曲线分布的气 隙磁通密度和感应转子电流间的交互生成转子上的扭矩。 AC感应电机的矢量控制 为了实现三相AC感应电机中的可变速度运行,必须为电机提供可变电压和可变频率。现代三相可变速度驱动(VSD)都配有数字控制的开关逆变器, 可以极大地降低系统总功耗。使用可变速度驱动可以节省最多60%的电力,资源利用率可以提高三到四倍,能够实现以前不可能实现的功能。可变速度驱动的功率 范围在电冰箱压缩机中为0.2~0.4kW,在洗衣机中为0.8~1kW,在住宅和公共服务的电气驱动中(例如多层住宅的冷水和热水泵、中继线中的冷水管 道等)为3~100kW。 控制算法可以分为两大类。第一类是标量控制,恒定电压/频率控制是非常流行的控制方法。另一类是矢量或磁场定向控制(FOC),矢量控制方法能够提供比标量控制更高的驱动性能。FOC的优势包括更高效率、完全扭矩控制、磁通和扭矩控制分离、动力学改进等。 FOC算法的基本理念是将定子电流分解为生成磁通的部分和生成扭矩的部分。两个部分可以在分解后分别控制。这样,电机控制器的结构就与分别激振的DC电机的结构一样简单。图2显示了AC感应电机的矢量控制的基本结构。 要执行矢量控制,必须采取以下这些步骤:
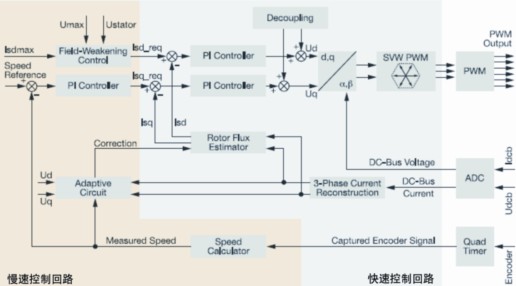
要把电流分解为生成磁通的部分和生成扭矩的部分(isd、isq),我们需要知道电机磁通的位置。这需要与转子连接的速度或位置传感器传感准确的速度信息。增量编码器或解析器被作为矢量控制驱动的位置传导器使用。在成本敏感的应用中(如洗衣机),测速发电机被广泛采用。然而在有些应用中,并不需要使用速度/位置传感器。目的并不是直接测量速度/位置,而是采用某些间接方法,估算转子位置。那些没有采用速度传感器的算法被称为“无传感器控制”。 矢量控制算法描述 已实施的控制算法的概述框图请见图3。与其他面向矢量控制的方法一样,它能够分别控制感应电机的励磁和扭矩。控制的目的是为了调节电机速度,速 度命令值由高级控制进行设置。该算法在两条控制回路中实施,快速内部控制回路实施采用125 μs周期,慢速外部控制回路的实施采用1毫秒周期。 为了实现感应电机控制,该算法使用一组馈入信号。基本馈入信号是DC总线电压、三相定子电流,它们是从DC总线电流和电机速度重构而来。为了实现正确操作,控制结构要求电机轴上有速度传感器。在提供算法的情况下,使用增量编码器。 图3 控制算法框图 快速控制回路实施两个独立电流控制回路,它们是直轴和正交轴电流(isd、isq)PI控制器。直轴电流(isd)用于控制转子磁通,正交轴电 流(isq)对应电机扭矩。电流PI控制器的输出用去藕定子电压的相应d和q轴部分进行汇总,这样我们就获得了应用于电机的定子电压的理想空间矢量。快速 控制回路执行所有必要任务,支持定子电流部分的独立控制。这些功能模块包括:
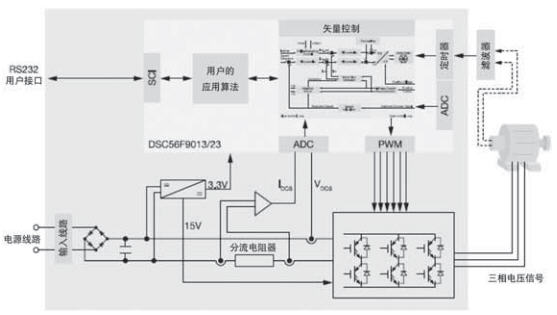
慢速控制回路执行速度和磁场弱化控制器和低优先级控制任务。PI速度控制器输出为生成定子电流的正交轴分量(isq)的扭矩设置参考。生成定子 电流的直轴分量(isd)的磁通参考由磁场弱化控制器设置。自适应电路纠正转子时间常量,最大限度地减少转子磁通位置估算的错误。 系统概念 飞思卡尔MC56F80xx系列非常适合数字电机控制,它在一粒芯片上集DSP的计算能力和MCU的控制器功能于一身。 MC56F80xx系列成员提供下列外设块:
带有单旁路传感器的三相ACIM矢量控制大大受益于灵活的PWM 模块、快速ADC和四任务定时器模块。PWM的配置灵活性实现了有效的三相电机控制。PWM模块能够在中央对齐配置中生成不对称PWM占空比。我们能够从 中受益,实现关键开关模式的三相电流重构。PWM重载SYNC信号生成,提供与其他模块(四任务定时器、ADC)的同步。该应用在同步模式中使用ADC 块,并与PWM脉冲同步。这种配置能够在要求的时间内,同步转换DC总线电流和电压所需的模拟值。ADC转换由PWM直接触发,无需DSC内核中继该事 件,从而实现可预测的、相对恒定的定时。
四任务定时器是一个极度灵活的模块,提供与时间事件有关的所有必要服务。该应用使用四条信道:
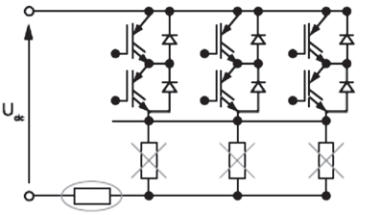
自适应闭路转子磁通估算增强控制性能,提高系统的总体稳健性。通过这种方式,参数漂移敏感性就大大降低。该算法实施单旁路电流传感,将三个电流传感器减为一个,最大限度地减少了系统成本。 另一个优势是高达20,000 rpm的大范围电机运行速度。举例来说,洗衣机就需要这种高速度。水平洗衣机中,电机和滚筒速度的比率大约为10:1,因此要达到2,000rpm的滚筒 速度,电机必须以20,000rpm速度运行。洗衣机的三相感应电机的标称速度远远低于20,000rpm (通常为6,000rpm)。使用磁场弱化算法可以达到更高速度,这能够让电机超过标称速度,同时磁通维持在标称电机电压。通过磁场弱化算法,使用一个标 称速度较低但运行速度最高可达20,000rpm的电机,可以大大节省成本和能源。 三相电流重构 矢量控制算法需要三相电机电流传感。标准方法是直接通过电流互感器或霍尔效应传感器传感相电流,霍尔效应传感器直接连接到承载开关和电机间的电流的电机相位线。要减少电流传感器的数量和设计总成本,采用单DC链路电流分流传感器方式测量三相定子电流(见图5)。 DC链路电流脉冲按照准确定时间隔进行采样。分流电阻器上的电压降使用三相驱动内的运算放大器放大,并提高1.65V。合成电压使用ADC进行转换。
定子的三相电流的重构基于开关的实际组合。ADC测量PWM循环的活动矢量过程中的DC链路电流。当应用电压矢量V1时,电流从正轨流到相A绕
组,再通过B和C相绕组返回负轨。当应用电压矢量V2时,返回负轨的DC链路电流等于T相电流,因此在每个扇区中,提供两相电流测量值。也可能计算三相电
流值,因为三个绕组电流的总和为零。电压矢量组合和相应重构的电机相电流显示在表1中。
风机能源成本估算示例 水泵和风机系统占行业中所有电机应用的近40%。风机的输入功率与气流的立方成正比。例如,如果100%的气流需要全功率,75%的气流理论上 需要 (0.75)3=全功率的42%。尽管这是零静电噪声条件下的理论节省数字,但即使是在实际应用中,也可以实现巨大的能源节省。VSD通常多用于节省离心 风机和水泵的能源。估算类似应用的节省时,使用风机定律会非常有用,该定律涉及到空气(液体)流动、输入功率和电机速度。 风机定律等式 Q2/Q1=N2/N1 P2/P1=(N2/N1)2 HP2/HP1=(N2/N1)3 其中:Q1,Q2—初始和新的体积流量(l/s) P1,P2—初始和新的压力或压头(kPa) N1,N2—初始和新的风机速度(rpm) HP1,HP2—初始和新的风机输入功率(kW) 供应具有两种流量条件的冷却水系统的集中水厂是风机定律应用的最好例子。系统由电子传动器控制,电子传动器按照系统要求节流阀控制水流。当节流 阀完全打开时,每秒流量为80升(l/s),而测量的功耗为20 kW。当使用节流阀把流速降到65 l/s 时,测量的功耗为18 kW。系统每年运行8,760小时,节流控制情况和不节流控制情况各占60%和40%。通过安装VSD,节省的能量可以计算如下: HP2/HP1=(N2/N1)3 As HP2/HP1=(Q2/Q1)3 HP2/20[kW]=(65 [l/s]/80[l/s])3 HP2=(65[l/s]/80[l/s])3*20[kW] HP2=10.77kW 该算式显示,在系统被节流控制的60%的时间里,节省大约等于: 8760小时/年* .60 * (18 kW-10.77kW) =38,001kWh 当出现以下情况时,应使用VSD:
结论 基于飞思卡尔MC56F80xx DSC的解决方案是各种工业和消费电机控制应用的经济高效的设计。DSC能够全面控制交流电感应电机,因此它始终以最佳效率运行。尽管电机的容量对应处理 需求,但与全速运行的电机的浪费相比,可变速度驱动可以节省大量能源。这减少了电机的压力和张力,延长了电机的电气和机械寿命。随着能源价格的上涨,飞思 卡尔DSC为电动机的能源节省推出了一款智能选件。 参考文献: [1] AN3476 - Washing Machine Three-Phase AC-Induction Direct Vector Control , rev #1, 08/16/2007 [2] RDDSCACIMVC - 3-Phase AC Induction Vector Control Drive with Single Shunt Current Sensing, (DRM092, Rev#0, 07/24/2007) [3] Motors and Variable Speed Drives, www.sedo.energy.wa.gov.au [4] MC56F80xx Freescale DSC - www.freescale.com [5] 3-Pahse AC Induction Motor - www.freescale.com/motorcontrol |






网友评论