
海洋要素测量系统的控制存储电路设计
发布时间:2010-8-17 16:35
发布者:lavida
|
1 前言 海洋学研究,海洋生产,海洋军事等活动都强烈地依赖海洋探测技术的发展。但是,长 期、定点、连续测量海洋环境参数,尤其是从海洋表面到海底的垂直剖面的监测大多由船只 完成,耗费大量钱财和人力,却无法得到极端风浪条件下的珍贵信息,手段显得落后。针对 这种状况而设计的海洋要素垂直剖面测量系统(简称“海马”)利用波浪能,通过其核心部件 棘爪机构单向抓紧、阻尼锁定和自由上浮等3种状态,使得搭载传感器的滑行器可以在水下 各个层面采集海洋要素,并实时将测量数据存储到SD卡。作者采用C8051F340单片机和直流 电机为主要器件,结合电平转换芯片和各种开关器件及SD存储卡,设计了控制存储电路,实 现了棘爪机构的3种状态及测量数据的海量存储。所采用的单片机和开关器件功耗低、体积 小、可控性强。该控制存储电路能够使得“海马”的工作达到节能、高效、可海量存储的目 的,即能够达到“海马”下潜运动能量全部来自波浪,上浮依靠自身浮力,测量数据存入外 挂存储器的目标。 2 外挂存储器的“海马”控制电路硬件设计 整个控制电路的硬件电路主要包括:MAX3223串行通讯接口、C8051F340单片机、SD 存储卡、固态继电器、延时继电器、限位开关、直流电机等。电路的硬件原理框图如图1所 示,这个电路结构简单,与机械设计部分的棘爪机构巧妙结合,实现了“海马”水下3种状 态。通过外挂SD卡存储器,单片机作主控制器,利用SPI总线,实现了测量数据的实时存储。 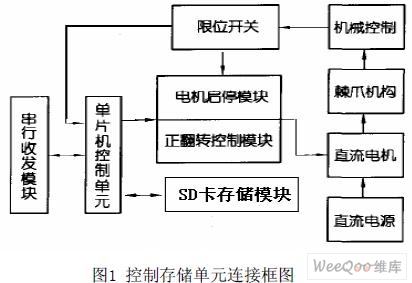 2.1 C8051F340单片机 C8051F340单片机属于C8051F系列单片机。C8051F系列单片机是一种典型的高性能单 片机,使用Silicon Laboratories专有的CIP-51微控制器内核,是完全集成的混合信号片上微控 制器,与MCS-51指令系统完全兼容。该系列单片机采用高速流水线处理技术,不再区分时 钟周期和机器周期,能在执行指令期间预处理下一条指令,提高了指令执行效率。C8051F340 单片机具备控制系统所需的模拟和数字外设,包括看门狗、ADC、DAC、电源管理器、定 时器、内部低频振荡器等,并具备多种总线接口,包括USB、UARTs、SPI、SMBus/I2C。 它采用Flash ROM技术,具有64 kB的片内Flash ROM存储器、256B的片内RAM和4KB的片内 XRAM,40个I/O端口(耐压5 V),是真正能独立工作的片上系统。Flash存储器可以在系统重新 编程,提供非侵入式数据存储及允许8051固件现场升级。用户软件可以控制所有外设以及 可以单独地关闭任何一个或所有的外设以节约能源。片上Silicon Labs的2-Wire (C2)开发接口 允许使用安装在最终应用系统上的MCU产品进行非侵入式、全速、在系统调试。C8051F系 列单片机的诸多特点和优越性,使其广受单片机系统设计工程师的青睐,成为很多测控系统 设计的首选机型。 2.2 传感器及接口电路模块 与分立的传感器和信号调理相比,集成的海洋用温盐深仪具有很好的优势,前者在设计 时复杂,干扰容易进入系统中,数据采集后滤波处理等均增加了单片机的负担。XR-420-CTD 是加拿大BRB公司生产的一款高精度的集成海洋专用温盐深仪,而且自身带有一定的存储容 量,可以测量温度、盐度、深度等参数,输出直接是数字量,通过MAX3223接口芯片与单片 机相连接。如果要改变“海马”的滑行器滑行的上限和下限深度,需要改变程序中预先设定 的上下限深度值。将预先设定的系统运动上、下限值存储在这个单元内,如需改变,则通过 串口将数据重新置人该芯片中。这样,整个系统将不再局限于一个区间运动,可以在更大范 围内测量数据。 2.3 开关控制电路模块 所设计的控制电路中电机与棘爪机构的驱动,主要依靠开关控制模块来实现。电路中 采用固态继电器(SSR)和双刀双掷延时电磁继电器。除此之外,限位开关作为单片机的一个 输入端,当电机转到预定的位置时,限位开关闭合,发送低电平信号给单片机,单片机收到 信号后发出使电机停转的指令。固态继电器(SSR,又称无触点开关器件)是近年来发展并广泛应用的一种新型器件,是由固态元件组成的无触点开关器件。它具有驱动功率小、噪声低、 可靠性好以及抗干扰能力强等优点。由于单片机的输出无法提供给电磁继电器足够的电压, 所以选用固态继电器来带动电磁继电器。 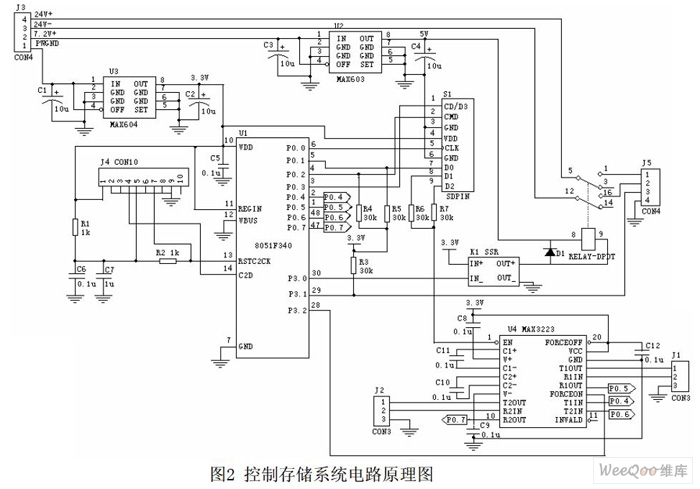 2.4 SD卡存储模块 长期、定点、连续的海洋环境监测系统的数据存储器具有容量大,可靠性高的要求。 SD卡因其耐用、可靠、安全、容量大、体积小、便于携带和兼容性好等优点而非常适合用于 海洋环境监测系统的数据存储。 SD卡(Secure Digital Memory Card)是一种基于Flash技术的存储卡,SD卡的特点是容量 大(最大容量为4 G,现在已有1 GB的产品),性价比很高(高于1 MB/元),体积小(32 mmx24 mmx2.1 mm),重量只有几克而且功耗低、接口简单。SD卡支持SD模式和SPI模式,其中SPI 模式中使用的SPI接口在单片机系统中应用非常广泛,本设计中就采用SPI模式接口与 C8051F340单片机连接。 3 “海马”控制存储电路软件设计 控制存储电路的功能是实现棘爪机构的单向抓紧、阻尼锁定和自由三个运动状态及将测 量数据实时存储。当其处于单向抓紧态时,滑行器只能向下运动,当波浪提升时,啮合松开, 滑行器因惯性滞留原位,当波浪下降时,啮合咬紧,滑行器下潜。锚定缆不停地做升沉运动, 滑行器在此运动驱动下,直达海底或控制系统预置的测量深度。在控制电路的作用下,当棘 爪机构处于自由态势时,滑行器与锚定缆失去啮合力,完全处于自由状态,由于滑行器是一 正浮力载体,所以,滑行器将在浮力作用下沿锚定缆上浮,并在上浮的过程中完成对海洋要 素的采集,由单片机完成对SD卡的读写操作,将数据存储在SD卡中。 “海马”的整个运动 过程可以分为单向下潜过程和自由上浮过程,在这两个过程中,系统依靠写入单片机的程序 来控制滑行器的运动状态。程序采用KEILC编写。 3.1 主函数 主函数要实现很多功能,如单片机初始化(时钟、交叉开关配置、SPI串口、UART0串口、 定时器0)、SD卡初始化、FAT文件系统初始化、新建文件、潜标下潜、潜标上浮时读取参数、 写文件等。 3.2 载体下潜过程 在滑行器不断下潜的过程中,单片机从传感器中读取深度值,并不断与预先设置的深度 值相比较,如果达到预定深度或比预定深度值大时,单片机发出*信号,棘爪机构松开, 载体在浮力作用下自由上浮。 3.3 载体上浮过程 载体在自由上浮的过程中,不仅要继续读取传感器中的深度信号,同时开始了对海洋要 素的采集。根据预先设置,传感器将每秒钟存储一次数据,包括温度、压力以及电导率等。 当滑行器到达上限深度时,单片机将发出闭锁信号,棘爪抓紧缆绳,重新在波浪能的驱动下 开始下潜过程,至此,“海马”完成一个周期的测量。不论是“海马”运动的上限值还是下 限值,都可以通过串口,利用计算机来改变,这样“海马”就能适应不同海域、不同深度的 测量的要求。 4 结语 实验证明,本文设计的控制存储电路能够精确地实现“海马”的3种运动状态和数据的实 时存储,它的硬件部分功耗低、体积小、可控性强,软件部分精度高、可移植性好、灵活性 强、适用的海域范围广,真正实现了海洋要素垂直剖面测量系统下潜运动能量全部来自波浪, 上浮依靠自身浮力的目标,并且外挂海量存储器,海洋要素实时存储,便于在PC机上进行数 据的分析、处理、显示、打印等操作。 本文作者的创新之处在于将SD卡存储方式运用到海洋要素垂直剖面数据采集系统,简化 了采集系统的设计,减小了系统尺寸,提高了系统的可靠性,使采集数据的读出变得简单易 行。由于原有数据采集系统,采用8051单片机作主控制器,本次设计选用与8051完全兼容的 高性能单片机C8051F340,既继承了原有采集系统的设计,又满足了访问SD卡的功能要求, 加快了整个系统的设计进程。设计的电路可以与机械设计部分的棘爪机构巧妙结合,实现了 测量平台运行状态的自如转换,并充分利用了海洋中无处不在的波浪能。 |
网友评论