|
|
|
随着物联网逐渐进入我们的生活,我们需要随时随地查看远端的设备运行状态及对设备进行控制,Yeelink为我们提供了一
个很好的云端服务器平台,设备通过网络连接到Yeelink服务器,上传本地检测数据,电脑或手机通过手机访问即可看到设备数据,
网上也有很多朋友使用Yeelink来做远程监控的示例,下面我们来介绍如何使用Yeelink做远程检测与控制,如有错误还请大家指正。
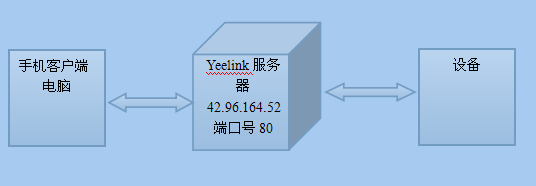
下面是Yeelink远程监控的一个大致框图
1、首先进入Yeelink主页注册一个自己的帐号,下面是主页为我们开发者提供的一个简单的开发流程

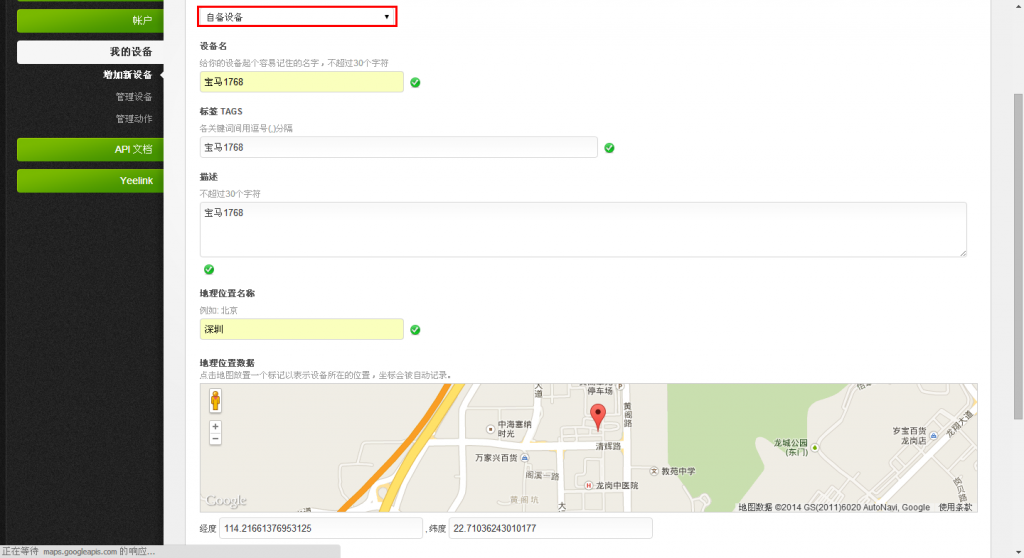
2、按照上面的流程点击添加设备,输入设备信息,在下面的地图中选择设备所在地
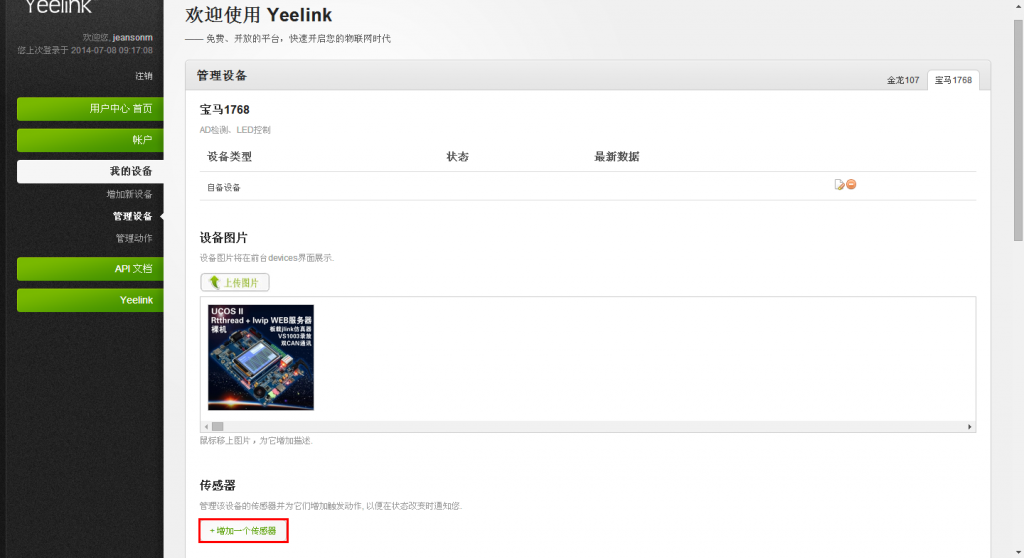
3、进入到设备管理界面,设置设备图片,添加传感器
4、添加传感器,这里我们添加一个数值型传感器和一个开关型传感器,通过下面选择设置传感器信息

5、传感器添加完成之后宝马1768设备下面出现两个传感器:AD转换值和LED1,AD转换值属于数值型传感器,显示AD转换电压,
LED1属于开关型传感器,用于控制宝马开发板LED灯亮灭,注意下面标记出来的地方蓝色框框第一个是设备ID即宝马1768的ID,第
二个为传感器ID即对应AD转换值和LED1各自的ID,由于两个传感器同属于宝马1768设备下面的两个传感器所以设备ID相同,而传感
器ID不同,这几个ID会在后面编程中使用到

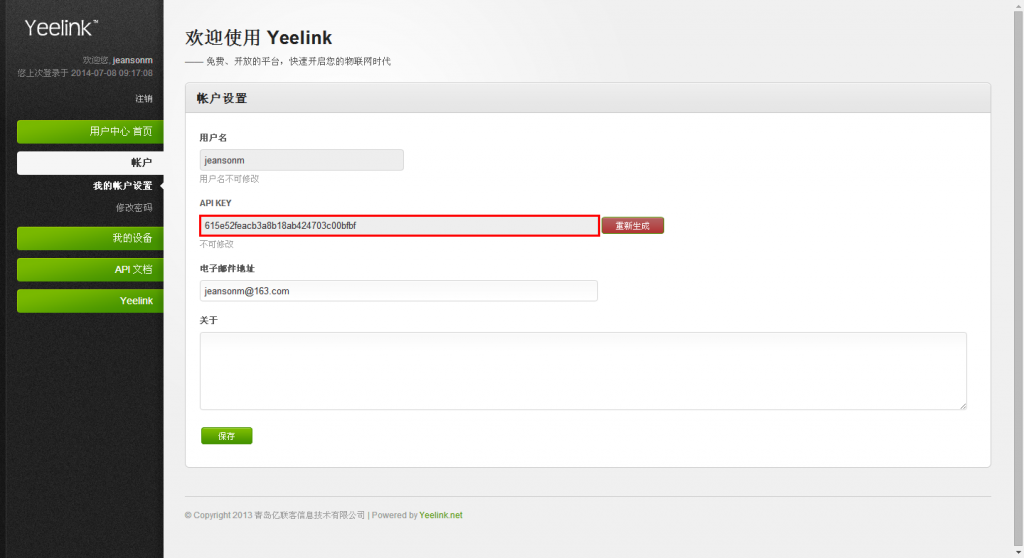
6、进入我的账户找到API KEY,当要进行传输数据时需要使用到该密码
7、上面Yeelink的设置基本完成了,就要开始进行程序编写了,这里我们直接使用宝马开发板搭建好的TCP客户端例程进行添加修改,
在系统配置完成之后初始化ADC和LED
- ADC_Init(); // ADC初始化
- LPC_GPIO2->FIODIR = 0x000000ff; // LED配置
- LPC_GPIO0->FIODIR = 0x00200000;
- LPC_GPIO0->FIOPIN |= 0x00200000;
- while(1)
- {
- tcpclient("42.96.164.52",80 ,1); //AD转换值上传
- tcpclient("42.96.164.52",80 ,2); //获取LED状态并改变开发板LED状态
- rt_thread_delay(RT_TICK_PER_SECOND * 4); //延时4s
- }
- //TCP客户端实验
- int tcpclient(const char* url, int port,int num)
- {
- char *recv_data;
- struct hostent *host;
- int sock, bytes_received;
- struct sockaddr_in server_addr;
- int Buf = 0;
- /* 通过函数入口参数url获得host地址(如果是域名,会做域名解析) */
- host = gethostbyname(url);
- /* 分配用于存放接收数据的缓冲 */
- recv_data = rt_malloc(BUFSZ);
- if (recv_data == RT_NULL)
- {
- rt_kprintf("No memory\n");
- return;
- }
- /* 创建一个socket,类型是SOCKET_STREAM,TCP类型 */
- if ((sock = socket(AF_INET, SOCK_STREAM, 0)) == -1)
- {
- /* 创建socket失败 */
- rt_kprintf("Socket error\n");
- /* 释放接收缓冲 */
- rt_free(recv_data);
- return 1;
- }
- if(num == 1) /
- {
- Buf = ADC_Get();
- Buf = (Buf * 3300)/4096;
- INT_CHAR(Buf);
- send_data1[234] = dis[0]; //更改上传数据内容即AD值
- send_data1[234+1] = '.';
- send_data1[234+2] = dis[0+1];
- send_data1[234+3] = dis[0+2];
- }
- /* 初始化预连接的服务端地址 */
- server_addr.sin_family = AF_INET;
- server_addr.sin_port = htons(port);
- server_addr.sin_addr = *((struct in_addr *)host->h_addr);
- rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));
- /* 连接到服务端 */
- while (connect(sock, (struct sockaddr *)&server_addr, sizeof(struct sockaddr)) == -1)
- {
- /* 连接失败 */
- rt_kprintf("Connect fail!\n");
- lwip_close(sock);
- /*释放接收缓冲 */
- rt_free(recv_data);
- return 1;
- }
- rt_kprintf("Connect OK!\n");
- if(num == 1)
- {
- /* 发送数据到sock连接 */
- if(send(sock,send_data1,strlen(send_data1), 0) < 0)
- {
- /* 发送失败,关闭这个连接 */
- rt_kprintf("\nSend error ");
- lwip_close(sock);
- /* 释放接收缓冲 */
- rt_free(recv_data);
- }
- else
- {
- rt_kprintf("\nSend OK ");
- bytes_received = recv(sock, recv_data, BUFSZ - 1, 0);
- lwip_close(sock);
- /* 释放接收缓冲 */
- rt_free(recv_data);
- }
- }
- else if(num == 2)
- {
- /* 发送数据到sock连接 */
- if(send(sock,send_data2,strlen(send_data2), 0) < 0)
- {
- /* 发送失败,关闭这个连接 */
- rt_kprintf("\nSend error ");
- lwip_close(sock);
- /* 释放接收缓冲 */
- rt_free(recv_data);
- }
- else
- {
- rt_kprintf("\nSend OK ");
- /* 从sock连接中接收最大BUFSZ - 1字节数据 */
- bytes_received = recv(sock, recv_data, BUFSZ - 1, 0);
- Buf = Search_str(recv_data,"\"value\":");
- if(recv_data[Buf] == '0')
- LPC_GPIO2->FIOPIN &= ~0xff; //关闭LED
- else
- LPC_GPIO2->FIOPIN |= 0xff; //打开LED
- rt_kprintf("\n%s ",recv_data+Buf);
- lwip_close(sock);
- /* 释放接收缓冲 */
- rt_free(recv_data);
- }
- }
- return 1;
- }
复制代码
8、我们可以看到程序中通过判断num值来发送两个不同的字符串,这里num就是用来区别是用来上传AD转换值还是LED状态获取的
下面看看两个字符串数据,我们可以看到下面两个字符串中第一行都出现了我们设备的ID和传感器ID,send_data1对应是AD转换值
上传,所以ID为20165,而send_data2为LED控制,ID对应为20166,U-ApiKey后面紧跟着就是我们上面在账户设置里面的密码,
Yeelink的API格式比较固定,至于其他一些参数可以参考Yeelink API文档
- char send_data1[300] = "POST /v1.0/device/12402/sensor/20165/datapoints HTTP/1.1\r\n\
- Host: api.yeelink.net\r\n\
- Accept: */*\r\n\
- U-ApiKey: 615e52feacb3a8b18ab424703c00bfbf\r\n\
- Content-Length: 14\r\n\
- Content-Type: application/json;charset=utf-8\r\n\
- Connection: close\r\n\
- \r\n\
- {\"value\":96 }\r\n"; /* 发送用到的数据 */
- 这里有一点需要注意的是Content-Length的长度必须为”value”后面跟着字符串的长度值加10,上面设置为14即”value”后面的值为4位,
- 这里初始化是”96 “
- char send_data2[300] = "GET /v1.0/device/12402/sensor/20166/datapoints HTTP/1.1\r\n\
- Host: api.yeelink.net\r\n\
- Accept: */*\r\n\
- U-ApiKey: 615e52feacb3a8b18ab424703c00bfbf\r\n\
- Content-Length: 0\r\n\
- Connection: close\r\n\
- \r\n\
- print get done.\r\n"; /* 发送用到的数据 */
复制代码
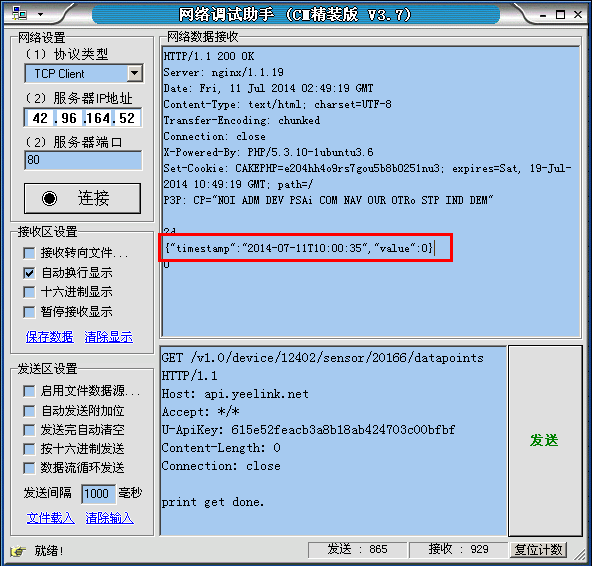
另外还有一点需要注意的是,当我们查询LED状态时需要接收Yeelink服务器数据,那么数据的哪部分才是对我们有用的呢,我们可以使用
网络调试助手,将调试助手连接到Yeelink服务器,发送字符串send_data2的内容,即可获取服务器返回消息,其中”value”后面的0是我们
需要的数据,表明现在开关是关着的,若开关打开则返回为1
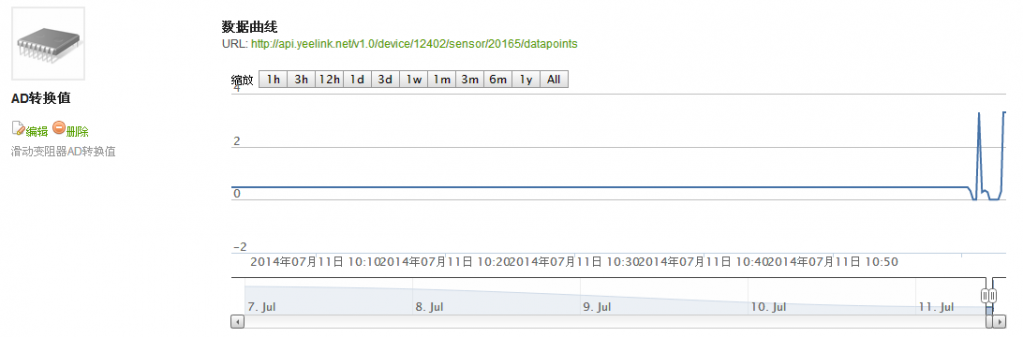
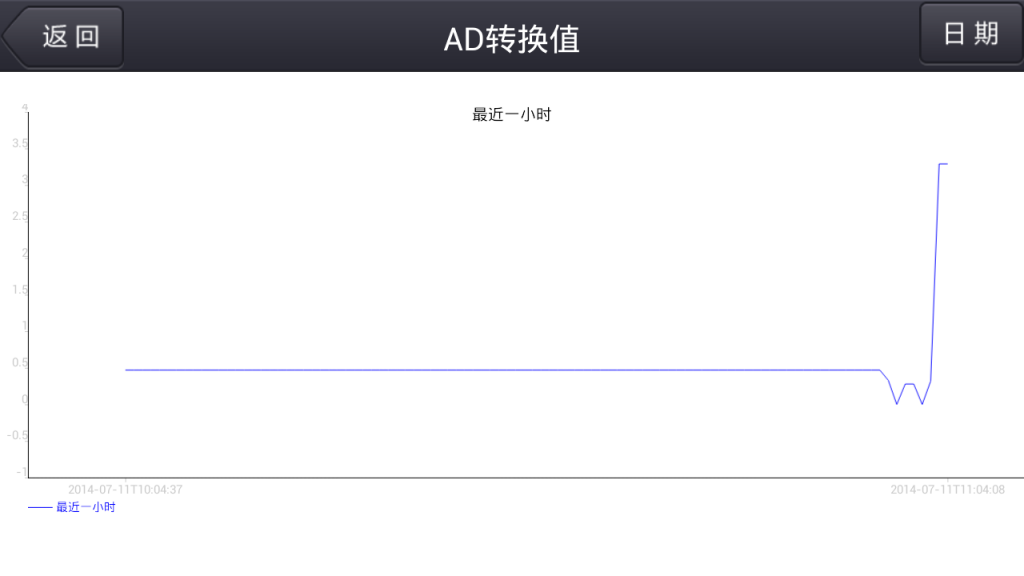
9、上面Yeelink设置和程序都介绍完了,下面就开始测试了下面是电脑显示波形
手机可以查看设备地址

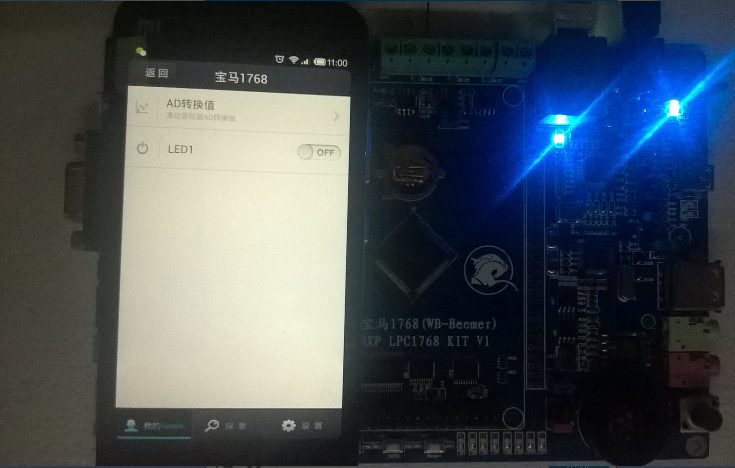
下面在看一下LED控制
|
|



 发表于 2016-12-30 10:22:39
发表于 2016-12-30 10:22:39
 楼主
楼主
