
»щУЪCANЧЬПЯөДЗұЛ®өз»ъЦЗДЬјаҝШПөНіЙијЖ
·ўІјКұјдЈә2010-6-20 12:07
·ўІјХЯЈәzealot
|
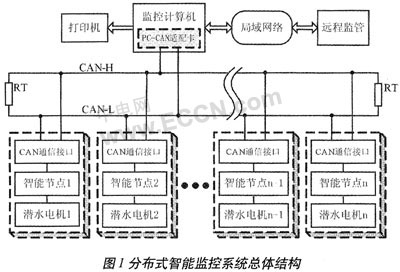
ДҝЗ°Ј¬№ъДЪНвТСУР¶ајТ№«ЛҫҝӘ·ўіцХл¶ФёцМеЗұЛ®өз»ъөДЦЗДЬөзБЛұЈ»ӨЧ°ЦГЈ¬ЛдИ»ҝЙТФҙпөҪұЈ»Өөз»ъөДДҝөДЈ¬ө«ОЮ·ЁКөПЦјҜЦР№ЬАнЎЈТтҙЛЈ¬¶ФЗұЛ®өз»ъИәөДКөКұјаҝШУлНіТ»№ЬАнөДТӘЗуИХТжЖИЗРЎЈұҫОДЙијЖБЛ»щУЪCANПЦіЎЧЬПЯөДЗұЛ®өз»ъИә·ЦІјКҪЦЗДЬјаҝШПөНіЈ¬ҝЙТФ¶ФЙўІјөДЗұЛ®өз»ъұЈ»ӨЧ°ЦГҪшРРЧйНшЈ¬КөПЦЗұЛ®өз»ъөДЦЗДЬ»ҜҝШЦЖәННшВз»Ҝ№ЬАнЎЈ ЗұЛ®өз»ъЦЗДЬјаҝШПөНіЧЬМе·Ҫ°ёЙијЖ »щУЪCANПЦіЎЧЬПЯөДЗұЛ®өз»ъ·ЦІјКҪЦЗДЬјаҝШПөНіУЙјаҝШјЖЛг»ъ(ДЪЦГPC-CANККЕдҝЁ)ЎўЦЗДЬҪЪөгЎўCANЧЬПЯНшВзЧйіЙЈ¬ЖдПөНіөДЧЬМеҪб№№ИзНј1ЛщКҫЎЈ·ЦІјФЪПЦіЎөДјаҝШҪЪөгҝЙТФ¶АБў¶Фөз»ъҪшРРЦЗДЬҝШЦЖәН№КХПұЈ»ӨЈ»јаҝШјЖЛг»ъҝЙТФНЁ№эCANЧЬПЯНшВзәНёчёцјаҝШҪЪөгҪшРРКөКұНЁРЕЈ¬ҙУ¶шКөПЦЗұЛ®өз»ъИәөД·ЦІјКҪҝШЦЖәНјҜЦРБЩ№ЬЎЈ
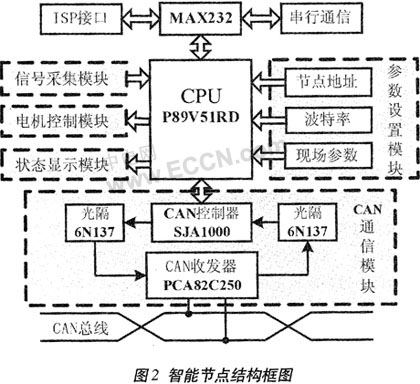
ЦЗДЬҪЪөгКЗХыёцјаҝШПөНіөДәЛРДІҝ·ЦЈ¬Ль¶ФЗұЛ®өз»ъҪшРРЦЗДЬҝШЦЖЈ¬Іў¶Фөз»ъФЪФЛРР№эіМЦРіцПЦөД№эФШЎў№эИИЎўЙшЛ®ЎўВ©Л®Ўў¶МВ·ЎўИұПаөИ№КХПҪшРРұЈ»ӨЎЈPC-CANККЕдҝЁУГАҙНкіЙCANЧЬПЯәНјаҝШјЖЛг»ъЦ®јдөДРӯТйЧӘ»»Ј¬ҝЙТФСЎУГPCIЧЬПЯККЕдҝЁЎўISAЧЬПЯККЕдҝЁ»тRS-232ҙ®РРНЁРЕККЕдЖчЎЈёчёцЦЗДЬҪЪөгЦ®јдНЁ№эЖБұОЛ«ҪКПЯНЯБӘ№№іЙCANЧЬПЯНшВзЈ¬ЧЬПЯБҪ¶ЛБ¬ҪУ120ҰёөДЧиҝ№ЖҘЕдөзЧиЈ¬ҝЙТФМбёЯПөНіөДОИ¶ЁРФәНҝ№ёЙИЕДЬБҰЎЈ јаҝШПөНіөДУІјюЙијЖ УЙјаҝШПөНіөДХыМеҪб№№әН№ҰДЬҝЙЦӘЈ¬ёГПөНіөДУІјюЙијЖЦчТӘЧгCANЦЗДЬҪЪөгөДЙијЖЎЈЦЗДЬҪЪөгУІјюөзВ·ЙијЖІЙУГБЛДЈҝй»ҜҪб№№Ј¬УЙMCUЎўCANНЁРЕДЈҝйЎўРЕәЕІЙјҜДЈҝйЎўөз»ъҝШЦЖДЈҝйЎўЧҙМ¬ПФКҫДЈҝйЎўІОКэЙиЦГДЈҝйј°ҙ®РРНЁРЕҪУҝЪЧйіЙЈ¬ЦЗДЬҪЪөгөДХыМеҪб№№ИзНј2ЛщКҫЎЈёщҫЭҫЯМеЗйҝцҝЙТФЦ»СЎУГЖдЦРөДІҝ·ЦДЈҝйЈ¬ФцјУБЛјаҝШЧ°ЦГөДКөУГРФәНҫӯјГРФЎЈАэИзЈәҝЙТФИҘөфПФКҫДЈҝйәНПЦіЎЙиЦГДЈҝйЈ¬АыУГјаҝШјЖЛг»ъКөПЦКэҫЭПФКҫәНІОКэЙиЦГөД№ҰДЬЎЈФЪөҘ»ъФЛРРКұЈ¬ҝЙТФІ»К№УГCANНЁРЕДЈҝйЎЈ
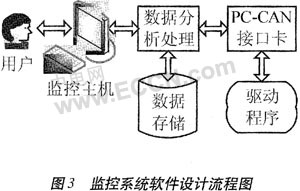
ОӘБЛјт»ҜЙијЖЈ¬МбёЯПөНіөДҝЙҝҝРФәНРФјЫұИЈ¬ЦЗДЬҪЪөгөДЦчТӘФӘЖчјю¶јКЗСЎУГН¬Т»јТ№«ЛҫөДІъЖ·Ј¬°ьАЁЈәОўҝШЦЖЖч(P89V51RD)ЎўCANҝШЦЖЖч(SJA1000)ЎўCANКХ·ўЖч(PCA82C250)ЎЈP89V51RDДЪҙш64kBөДFlashҙжҙўЖчЈ¬ёГҙжҙўЖчЦ§іЦISP№ҰДЬЈ¬ISPөДУЕөгКЗЦ§іЦФЪПөНіұаіМЈ¬јҙІ»РиТӘТЖіцОӘҝШЦЖЖчЈ¬Ц»РиТӘНЁ№эҙ®РРҪУҝЪ(RXTәНRXD)Ј¬ҪбәПЙПО»»ъИнјюҫНҝЙТФКөПЦPC¶ФMCUөДЦШёҙұаіМЈ¬¶шЗТУІјюөзВ·Б¬ҪУјтөҘЈ¬ХвСщҫН·ҪұгБЛіМРтөчКФЈ¬Лх¶МБЛЙијЖҝӘ·ўЦЬЖЪЈ¬МбёЯБЛПөНіөДОИ¶ЁРФЎЈПЦіЎЦЗДЬҪЪөгёчёцЧйіЙДЈҝйөД№ҰДЬИзПВЈә 1Ј®CANНЁРЕДЈҝйЈәCANЧЬПЯНЁРЕҪУҝЪөзВ·ЦчТӘУЙCANҝШЦЖЖчSJA1000Ўў6N137ёЯЛЩ№вёфЎўCANКХ·ўЖчPCA82C250ЧйіЙЎЈSJA1000НкИ«јжИЭCAN2.0РӯТйЈ¬УГАҙНкіЙОпАнІгәНКэҫЭБҙВ·ІгөД№ҰДЬЈ¬ҝЙКөПЦ¶ФНЁРЕКэҫЭөДіЙЦЎҙҰАнЈ¬ҫЯУР¶аЦчҪб№№ЎўЧЬПЯ·ГОКУЕПИИЁЎўУІјюВЛІЁөИМШөгЈ»PCA82C250МṩБЛ¶ФCANЧЬПЯІо¶Ҝ·ўЛНәНҪУКХКэҫЭөД№ҰДЬЈ¬УРР§өШМбёЯБЛЧЬПЯөДҝ№ёЙИЕДЬБҰЈ¬КөПЦБЛұЈ»ӨЧЬПЯЎўҪөөНЙдЖөёЙИЕөИ№ҰДЬЎЈОӘБЛҪшТ»ІҪМбёЯХыёцПөНіөДҝЙҝҝРФәНОИ¶ЁРФЈ¬ФЪSJA1000әНPCA82C250Ц®јдФцјУБЛ№вөзёфАлЖчјюЈ¬ІўЗТІЙУГБЛЛ«өзФҙЈ¬УРР§өШТЦЦЖУЙЧЬПЯТэИлөДёЙИЕЎЈ 2Ј®РЕәЕІЙјҜДЈҝйЈәУГАҙјмІвөз»ъөДФЛРРЧҙМ¬Ј¬°ьАЁЈәІ¬өзЧиОВ¶Иҙ«ёРЖчЎўөзБч»ҘёРЖчЎўөзј«КҪТәО»ҙ«ёРЖчЎЈ·ЦұрУГАҙјмІвөз»ъИэПа¶ЁЧУөДОВ¶ИЎўИэПаЦчөзБчәНөз»ъЗ»ДЪөДЛ®О»Ј¬ҝЙТФУРР§өШјаІвЗұЛ®өз»ъөД№эБчЎў№эИИЎўИұПаЎў¶МВ·ЎўЙшВ©өИТміЈПЦПуЎЈРЕәЕІЙјҜДЈҝйТФ12О»ҫ«¶ИөДADCәН¶аВ·ДЈДвҝӘ№ШОӘәЛРДЈ¬Ҫ«ҙ«ёРЖчІЙјҜөҪөДДЈДвРЕәЕҪшРРөчАнәуЧӘұдОӘКэЧЦРЕәЕІўЛНИлОўҝШЦЖЖчЎЈMCUөГөҪјмІвРЕПўәуЧціцПаУҰөДЕР¶ПЈ¬ІўЛНЦБІ»Н¬өДЧУіМРтҪшРРПаУҰөДҙҰАнЈ¬ИзЈә°Сөз»ъФЛРРөДОВ¶ИЎўөзБчөИРЕПўНЁ№эНЁРЕіМРт·ўЛНёшјаҝШјЖЛг»ъЈ»ИфіцПЦөз»ъДЪЗ»Л®О»№эөНЎўОВ¶И№эёЯЎўөзБч№эҙуЈ¬ФтЧФ¶ҜЗР¶ПұҫҪЪөгөДөз»ъЎў·ўіцЙщ№вұЁҫҜРЕПўЈ¬Іў°СҪЪөгөДНЈ»ъРЕПўНЁ№эCANЧЬПЯ·ўЛНёшјаҝШјЖЛг»ъЎЈ 3Ј®өз»ъҝШЦЖДЈҝйЈәMCUЕР¶Пөз»ъ¶ЁЧУОВ¶ИЎўөзБчЎўТәО»ЦРөДИОТ»ПоЦөі¬іцЙи¶ЁЦө·¶О§КұЈ¬¶ј»бНЁ№эSSR(№ММ¬јМөзЖч)ҙҘ·ўПаУҰөДТміЈҙҰАнөзВ·Ј¬К№өз»ъөГөҪұЈ»ӨЎЈ 4Ј®ІОКэЙиЦГДЈҝйЈәұЁҫҜөзБчЎўұЁҫҜОВ¶ИЎўНЈ»ъөзБчЎўНЈ»ъОВ¶ИЎўҪЪөгөШЦ·ЎўІЁМШВКөИРЕПўНЁ№эІОКэЙиЦГДЈҝйҙжҙўУЪ»щУЪX25045өДE2PROMЦРЈ¬КөПЦҪЪөг№ӨЧчІОКэПЦіЎЙи¶Ё№ҰДЬЎЈіэБЛҪЪөгөШЦ·НвЈ¬ЖдЛьөДІОКэТІҝЙТФНЁ№эјаҝШјЖЛг»ъЙиЦГЎЈ 5Ј®ЧҙМ¬ПФКҫДЈҝйЈәІЙУГ»щУЪI2CЧЬПЯөДПФКҫјјКхЈ¬НЁ№эLEDКэВл№ЬКөКұПФКҫөз»ъФЛРР№эіМЦР¶ЁЧУөДОВ¶ИәНөзБчЦөЎЈІўҝЙТФФЪЙиЦГДЈКҪПВПФКҫҙэ¶ЁІОКэөДөұЗ°ЦөЎЈөұөз»ъіцПЦ·ЗХэіЈНЈ»ъКұЈ¬·ў№в¶юј«№ЬҝЙТФЦёКҫіц№КХПөДАаРНЈ¬·ҪұгјмІйО¬»ӨЎЈ јаҝШҪЪөгөДУІјюІҝ·ЦіэБЛТФЙПҪйЙЬөДЦ®НвЈ¬»№УРөзФҙөзВ·әНҝҙГЕ№·өзВ·ЎЈөзФҙөзВ·МṩЛщРиёфАлөзФҙЈ¬УГУЪМбёЯҪЪөгөДҝЙҝҝРФәН°ІИ«РФЈ»ҝҙГЕ№·өзВ·ЦчТӘұЈЦӨПөНіФЛРРөДОИ¶ЁРФЈ¬ФЪЙПөзЎўөфөзТФј°ҫҜҪдЗйҝцПВёҙО»КдіцЎЈ јаҝШПөНіөДИнјюЙијЖ ҙУХыёцјаҝШПөНіөДҪЗ¶ИАҙҝҙЈ¬ёГПөНіөДИнјюЙијЖЦчТӘ·ЦОӘБҪҙуІҝ·ЦЈәјҙјаҝШјЖЛг»ъУҰУГИнјюЙијЖәНПЦіЎЦЗДЬҪЪөгИнјюЙијЖЎЈ јаҝШјЖЛг»ъөДИнјюЙијЖ јЖЛг»ъјаҝШИнјюЦчТӘ·ЦОӘУГ»§УҰУГІгЎўКэҫЭ·ЦОцҙҰАнІгј°УІјюЙиұёЗэ¶ҜІг3ёцІҝ·ЦЈ¬ЖдИнјюЙијЖБчіМИзНј3ЛщКҫЎЈ
УІјюЙиұёЗэ¶ҜІгНЁ№эPC-CANҪУҝЪҝЁҪЁБўјаҝШјЖЛгУлCANЧЬПЯөДБ¬ҪУЈ¬ІўУлЦЗДЬҪЪөгҪшРРКэҫЭҪ»»»Ј»КэҫЭ·ЦОцҙҰАнІгНкіЙCANЧЬПЯКэҫЭөДҪУКХЎў·ЦАаЎўЕР¶ПЎўҙҰАнЎў·ўЛНЎўҙжИЎІЩЧчөИИООсЈ»УГ»§УҰУГІгәНУГ»§РиЗуҪфГЬПа№ШЈ¬ЛьЦчТӘНкіЙөДИООсКЗОӘУГ»§МṩПФКҫёчАаРЕПўөДјаҝШҪзГжЈ¬ҪшРРИЛ»ъҪ»»ҘЈ¬ТІҫНКЗНЁіЈЛщЛөөДИЛ»ъҪзГж(HMI)ЙијЖЎЈ јаҝШҪЪөгөДИнјюЙијЖ ЗұЛ®өз»ъөДПЦіЎҝШЦЖУлКэҫЭІЙјҜ¶јКЗНЁ№эЦЗДЬҪЪөгНкіЙөДЈ¬УлҪЪөгөДУІјюЙијЖПаТ»ЦВЈ¬ЦЗДЬјаҝШҪЪөгөДИнјюЙијЖТІЧсСӯДЈҝй»ҜөДЙијЖФӯФтЈ¬К№ҝШЦЖИнјюҫЯУРТЧ¶БЎўТЧА©Х№әНТЧО¬»ӨөДУЕөгЎЈНЁ№эC51УпСФұаРҙПаУҰөДИнјюДЈҝйКөПЦЦЗДЬҪЪөгөДёчЦЦ№ҰДЬЎЈИнјюөДёч№ҰДЬДЈҝйЦ®јдНЁ№эИлҝЪәНіцҝЪІОКэПа»ҘБӘПөЈ¬ЧйәПБй»о·ҪұгЈ¬јхЙЩБЛөчКФКұјдЈ¬Лх¶МБЛҝӘ·ўЦЬЖЪЎЈ јаҝШҪЪөгНЁРЕіМРтЙијЖ ЦЗДЬјаҝШҪЪөгөДНЁРЕІЙУГCANЧЬПЯ2.0AРӯТйЈ¬НЁРЕДЈҝйөДИнјюЙијЖЦчТӘУЙіхКј»ҜЧУіМРтЎўұЁОДҪУКХЧУіМРтЎўұЁОД·ўЛНЧУіМРт3Іҝ·ЦЧйіЙЎЈЖдЦРіхКј»ҜЧУіМРтКЗКөПЦНЁРЕөД№ШјьЈ¬ЛьЦчТӘУГАҙНкіЙCANҝШЦЖЖч№ӨЧч·ҪКҪөДСЎФсЈ¬јҙ¶ФПөНіЦРөДCANҝШЦЖЖчҝШЦЖ¶ОЦРөДјДҙжЖчҪшРРЙиЦГЎЈіхКј»Ҝ№эіМКЗФЪCANҝШЦЖЖчёҙО»ДЈКҪПВНкіЙөДЎЈ ЦЗДЬҪЪөгУлјаҝШјЖЛг»ъЦ®јдөДКэҫЭҪ»»»КЗНЁ№э·ўЛНіМРтәНҪУКХіМРтКөПЦөДЎЈұЁОД·ўЛНКұЦ»РиҪ«өз»ъөДЧҙМ¬КэҫЭЛНИлSJA1000өД·ўЛН»әіеЗшЦРЈ¬И»әуЖф¶Ҝ·ўЛНЗлЗуЎЈјаҝШҪЪөгІЙУГ¶ЁКұЦР¶ПөД·ҪКҪЦч¶ҜПтјаҝШјЖЛг»ъ·ўЛНКэҫЭЎЈХвКЗАыУГБЛCANЧЬПЯҝЙТФІЙУГ¶аЦч»ъ·ҪКҪНЁРЕөДМШөгЎЈУЙУЪКөКұјаҝШ№ҰДЬУЙёчёцҝШЦЖҪЪөгНкіЙЈ¬¶шјаҝШјЖЛг»ъЦчТӘЖрөҪ№ЬАнЧчУГЈ¬ЛщТФІЙУГБЛ¶ЁКұЙПҙ«КэҫЭөД·Ҫ·ЁЈ¬¶шГ»УРКөКұЙПҙ«ЛщУРҙ«ёРЖчІЙјҜөҪөДКэҫЭЈ¬ҙУ¶шјхЗбБЛЧЬПЯёәөЈЎЈТ»ёцХэФЪөИҙэөДұЁОД»бҙУҙжҙўЖчёҙЦЖөҪ·ўЛН»әіеЖчәуЈ¬ЦГО»ГьБојДҙжЖчTRұкЦҫІъЙъ·ўЛНЗлЗуЈ¬·ўЛН№эіМУЙSJA1000¶АБўНкіЙЎЈ»щУЪSJA1000өДұЁОДҪУКХУРБҪЦЦ·ҪКҪЈәЦР¶П·ҪКҪәНІйСҜ·ҪКҪЎЈОӘБЛұЈЦӨҪУКХұЁОДөДЧјИ·РФЈ¬СЎФсКөКұРФҪПёЯөДЦР¶П·ҪКҪЎЈФЪЦР¶П·ҪКҪПВЈ¬Из№ыSJA1000ТСҪУКХТ»ёцұЁОДЈ¬ІўЗТұЁОДТСНЁ№эСйКХВЛІЁЖчІў·ЕИлҪУКХFIFOЈ¬ДЗГҙ»бІъЙъТ»ёцҪУКХЦР¶ПЈ¬НЁЦӘОўҙҰАнЖчУРұЁОДТСҫӯҪУКХЎЈҪУКХ»әіеЗшУГАҙҙж·ЕCANЧЬПЯЙП·ўАҙөДКэҫЭЈ¬MCU¶БИЎКэҫЭәуЈ¬ҪУКХ»әіеЗшҪ«ұ»ЗеҝХЈ¬өИҙэҪУКХРВөДКэҫЭЎЈ ҪбУп ұҫОДІЙУГCANПЦіЎЧЬПЯЙијЖөДЗұЛ®өз»ъ·ЦІјКҪЦЗДЬјаҝШПөНіҫЯУРҝ№ёЙИЕДЬБҰЗҝЎўНшВз»Ҝ№ЬАніМ¶ИёЯЎўИЛ»ъҪзГжУСәГөИМШөгЎЈҝӘ·ў№эіМЦРЛщМбіцөДјјКх·Ҫ°ёәНКөПЦ·Ҫ·ЁҝЙТФФЪАаЛЖөД№ӨТөөЧІгјаҝШНшВзПөНіј°·ЦІјКҪјаҝШПөНіөДЙијЖЦРНЖ№гУҰУГЎЈ |
НшУСЖАВЫ