
CANЧЬПЯО»¶ЁКұІОКэөДИ·¶Ё
·ўІјКұјдЈә2010-3-17 19:04
·ўІјХЯЈәұДұД
|
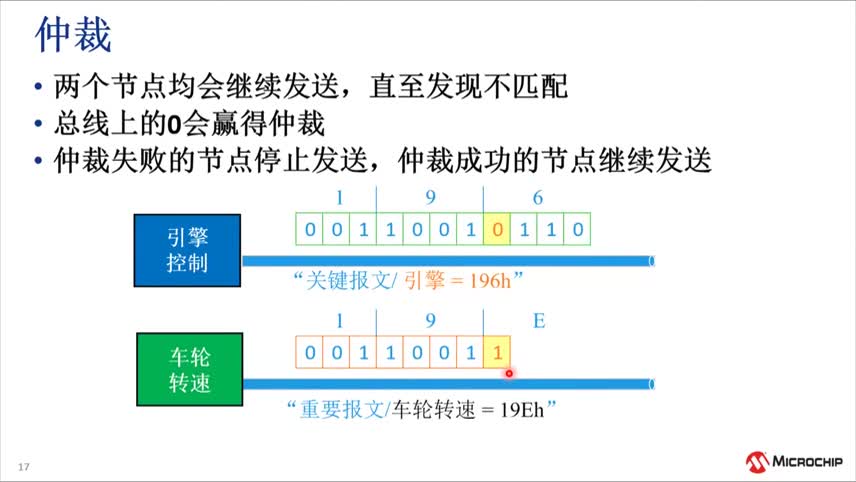
ТэСФ CANЧЬПЯКЗТ»ЦЦУРР§Ц§іЦ·ЦІјКҪҝШЦЖәНКөКұҝШЦЖөДЎў¶аЦчөДТмІҪҙ®РРНЁРЕНшВзЎЈУЙУЪCANЧЬПЯҫЯУРҪПЗҝөДҫАҙнДЬБҰЈ¬Ц§іЦІо·ЦКХ·ўЈ¬ККәПёЯФлЙщ»·ҫіЈ¬ҫЯУРҪПФ¶өДҙ«КдҫаАлЈ¬ІўЗТPhilipsәНIntelөИ°лөјМ幫Лҫ¶јУРЦ§іЦCANНЁРЕРӯТйөДјҜіЙЖчјюЎЈCANЧЬПЯТСҫӯФЪёчёцБмУтЦРөГөҪБЛ№г·әУҰУГЎЈ ФЪCANНЁРЕРӯТйЦР№ж¶ЁЈ¬НЁРЕІЁМШВКЎўГҝёцО»ЦЬЖЪөДИЎСщО»ЦГәНёцКэЈ¬¶јҝЙТФЧФРРЙи¶ЁЎЈХвСщөДЙијЖАнДоЈ¬ОӘУГ»§ФЪЧФјәөДУҰУГЦРЈ¬УЕ»ҜНшВзНЁС¶РФДЬМṩБЛҝХјдЎЈОӘБЛНЁ№эЙи¶ЁО»¶ЁКұІОКэАҙУЕ»ҜНшВзНЁРЕРФДЬЈ¬ұШРлЗеіюО»¶ЁКұІОКэУлІОҝјКұЦУОуІоәНПөНіДЪРЕәЕСУіЩөД№ШПөЎЈИз№ыО»ЦЬЖЪДЪөДИЎСщО»ЦГЖ«әуЈ¬Ҫ«ДЬ№»ИЭИМҪПҙуөДРЕәЕҙ«КдСУіЩЈ¬ПаУҰөДЈ¬ЧЬПЯҙ«КдҫаАлҝЙТФСУіӨЈ»¶шИз№ыЦЬЖЪДЪөДИЎСщО»ЦГҪУҪьЦРјдЈ¬ФтҝЙТФИЭИМПөНіөДҪЪөгјдөДІОҝјКұЦУОуІоЎЈө«ХвПФИ»КЗГ¬¶ЬөДЈ¬ОӘБЛРӯөчХвЦЦГ¬¶ЬЈ¬ұШРл¶ФО»¶ЁКұІОКэҪшРРУЕ»ҜО»ЦГЎЈ Нј1 О»ЦЬЖЪҪб№№Нј НЁ№э¶ФCANЧЬПЯО»¶ЁКұІОКэҪшРРСРҫҝЈ¬ХТөҪГ¬¶ЬөД№ШјьЛщФЪЈ¬ҫНДЬ№»¶ФЖдҪшРРУЕ»ҜЈ¬ҙУ¶шМбёЯНЁРЕПөНіөДХыМеРФДЬЎЈПВГжТФPhilips№«ЛҫөД¶АБўНЁРЕҝШЦЖЖч SJA1000ОӘАэЈ¬ҪшРРСРҫҝЎЈ 1 Па№Ш¶ЁТе 1.1 О»ЦЬЖЪөДЧйіЙ ІЁМШВКЈЁfbitЈ©КЗЦёөҘО»КұјдДЪЛщҙ«КдөДКэҫЭО»өДКэБҝЈ¬Т»°гИЎөҘО»КұјдОӘ1sЎЈІЁМШВКУЙНЁРЕПЯЙПҙ«КдөДТ»ёцКэҫЭО»ЦЬЖЪөДіӨ¶ИЈЁTbitЈ©ҫц¶ЁЈ¬ИзПВКҪЛщКҫЎЈ Fbit=1/Tbit ЈЁ1Ј© ёщҫЭPhilips№«ЛҫөД¶АБўНЁРЕҝШЦЖЖчЈ¬Т»ёцО»ЦЬЖЪУЙ3ёцІҝ·ЦЧйіЙЈәН¬ІҪ¶ОЈЁtSYNC_SEGЈ©ЎўПаО»»әіе¶О1ЈЁtTSEG1Ј©әНПаО»»әіе¶О2ЈЁtTSEG2Ј©ЎЈ Tbit=tSYNC_SEG+tTSEG1+tTSEG2 (2) ЛщУРХвР©Кұјд¶ОЈ¬¶јУРТ»ёц№ІН¬өДКұјдөҘФӘЎӘЎӘПөНіКұЦУЦЬЖЪЈЁTSCLЈ©ЎЈҫЯМеөҪSJA1000Ј¬TSCLУЙЧЬПЯКұРтјДҙжЖчөДЦөАҙИ·¶ЁЎЈ SJA1000УР2ёцЧЬПЯКұРтјДҙжЖчЈ¬јҙЧЬПЯКұРтјДҙжЖч0ЈЁBTR0Ј©әНЧЬПЯКұРтјДҙжЖч1ЈЁBTR1Ј©ЎЈХв2ёцјДҙжЖчУРЧФјәІ»Н¬өД№ҰДЬ¶ЁТеЈ¬№ІН¬ЧчУГҫц¶ЁЧЬПЯөДНЁРЕІЁМШВКЎЈ ЧЬПЯКұРтјДҙжЖч0 ¶ЁТеІЁМШВКФӨЙиЦөBRPЈЁ№І6О»Ј¬ИЎЦөЗшјд[1,64]әНН¬ІҪМшЧӘҝн¶ИSJWЈЁ№І2О»Ј¬ИЎЦөЗшјд[1,4]Ј©өДЦөЎЈО»№ҰДЬЛөГчИзұн1ЛщБРЎЈ ұн1
CANөДПөНіКұЦУЦЬЖЪTSCLЈ¬ҝЙТФУЙBRPөДКэЦөОӘҫц¶ЁЈ¬јЖЛ㹫КҪИзПВЈә TSCL=2TCLKЎБBRP=2TCLKЎБ(32BRP.5+16BRP.4+ 8BRP.3+4BRP.2+2BRP.1+1BRP.0+1) ЈЁ3Ј© ЖдЦРTCLKОӘІОҝјКұјдөДЦЬЖЪЎЈ TCLK=1/fCLK ЈЁ4Ј© ОӘБЛІ№іҘІ»Н¬ЧЬПЯҝШЦЖЖчөДКұЦУХсөҙЖчЦ®јдөДПаО»Ж«ТЖЈ¬ИОәОЧЬПЯҝШЦЖЖчұШРлФЪөұЗ°ҙ«ЛНөДПа№ШРЕәЕұЯСШЦШРВН¬ІҪЎЈН¬ІҪМшЧӘҝн¶И¶ЁТеБЛГҝТ»О»ЦЬЖЪҝЙТФұ»ЦШРВН¬ІҪЛх¶М»тСУіӨөДКұЦУЦЬЖЪөДЧоҙуКэДҝЎЈ tSJW=TSCLЎБЈЁ2ЎБSJW.1+1ЎБSJW.0+1Ј© ЈЁ5Ј© ЧЬПЯКұРтјДҙжЖч1 ¶ЁТеГҝёцО»ЦЬЖЪіӨ¶ИІЙСщөгөДО»ЦГәНФЪГҝёцІЙСщөгөДІЙСщКэДҝЎЈО»№ҰДЬЛөГчИзұн2ЛщБРЈ¬ЖдЦРSAMТвТејыұн3ЎЈ ұн2
ұн3
TSEG1ЈЁ№І4О»Ј¬ИЎЦөЗшјд[1,16]Ј©әНTSEG2ЈЁ№І3О»Ј¬ИЎЦөЗшјд[1,8]Ј©ҫц¶ЁБЛГҝТ»О»КұЦУКэДҝәНІЙСщөгөДО»ЦГЎЈХвАп tSYNC_SEG=1ЎБTSCLЈЁҙЛКұјд¶О№М¶ЁЈ© ЈЁ6Ј© tTSEG1=TSCLЎБ(8ЎБTSEG1.3+4ЎБTSEG1.2+2ЎБTSEG1.1+1ЎБTESG1.0+1) (7) tTSEG2=TSCLЎБ(4ЎБTSEG2.2+2ЎБTSEG2.1+1ЎБTESG2.0+1) (8) О»ЦЬЖЪөДұкБҝЦөЈЁNBTЈ©¶ЁТеОӘЈ¬SYNC_SEGЈЁН¬ІҪ¶ОПөНіКұЦУЦЬЖЪКэЈ©ЎўTSEG1ЈЁПаО»»әіе¶О1ПөНіКұЦУЦЬЖЪКэЈ©ЎўTSEG2ЈЁПаО»»әіе¶О2ПөНіКұЦУЦЬЖЪКэЈ©Ц®әНЎЈХвҫц¶ЁБЛЛьөДИЎЦөЗшјдОӘ[3,25]Ј¬ФЪ1ёцИЎСщөгКұЈ¬ЧоРЎЦөТ»°гИЎ4Ј»ФЪ3ёцИЎСщөгКұЈ¬ЧоРЎЦөТ»°гИЎ5ЎЈ NBT=Tbit/TSCL=SYNC_SEG+TSEG1+TSEG2 (9) О»ЦЬЖЪөДТ»°гҪб№№ИзНј1ЛщКҫЎЈ 
1.2 ІОҝјКұЦУОуІо ФЪПөНіЦРЈ¬ГҝТ»ёцҪЪөг¶јУРЧФјә¶АБўөДІОҝјКұЦУЎЈУЙУЪЦЖФм№ӨТХЎўФЛРРКұјдј°»·ҫіОВ¶ИөДұд»ҜЈ¬ХвР©КұЦУөДКөјКЖөВКНщНщЖ«АлФӨЖЪөДЖөВКЦөЎЈОТГЗіЖХвЦЦЖ«ІоОӘІОҝјКұЦУОуІоЈЁҰӨfЈ©ЎЈFCLK,max/minұнКҫІОҝјКұЦУЖөВКөДЧоҙуЦө»тЧоРЎЦөЈ¬fCLK,ratұнКҫІОҝјКұЦУЖөВКөД¶о¶ЁЦөЎЈ ПаУҰөДПөНіКұЦУЦЬЖЪТІ»бУРОуІоЎЈTSCL,minұнКҫПөНіКұЦУЦЬЖЪЧоРЎЦөЈ¬TSCL,maxұнКҫПөНіКұЦУЦЬЖЪЧоҙуЦөЈ¬TSCL,ratұнКҫПөНіКұЦУЦЬЖЪ¶о¶ЁЦөЎЈУЙУЪҰӨf<<1Ј¬ҝЙТФҪшРРҪьЛЖЎЈ TSCLЈ¬min=(TSCL,rat)/(1+ҰӨf)ЎЦTSCL,ratЎБ(1-ҰӨf) ЈЁ11Ј© TSCLЈ¬max=(TSCL,rat)/(1-ҰӨf)ЎЦTSCLЈ¬ratЎБ(1+ҰӨf) (12) 1.3 ҙ«КдСУіЩ CANЧЬПЯІЙУГОЮЖЖ»өРФөД»щУЪУЕПИИЁөДЦЩІГ»ъЦЖЎЈФЪХвЦЦ»ъЦЖПВЈ¬ҙ«КдСУіЩЦБ№ШЦШТӘЎЈИз№ыҙ«КдСУіЩКұјд№эіӨЈ¬Ҫ«өјЦВОЮР§өД·ГОКЦЩІГЎЈҙ«КдСУіЩКұјдУЙОпАнЧЬПЯСУКұЈЁtBUSЈ©ЎўЧЬПЯЗэ¶ҜЖчСУКұЈЁttranЈ©әНЖдЛьЙиұёҙ«КдСУіЩЈЁtothЈ©№ІН¬ҫц¶ЁЎЈЖдЛьЙиұё°ьАЁНЁРЕҝШЦЖЖчЎўёфАл№всоөИЎЈ tprop=2ЎБ(tBUS+ttran+toth) ҙ«КдСУіЩөДұкБҝЦөЈЁPROPЈ©ҝЙТФУЙ№«КҪЈЁ14Ј©өГөҪЎЈ PROP=tprop/TSCL (14) 1.4 Н¬ІҪ НЁ№эН¬ІҪ»ъЦЖЈ¬ҝЙТФПыіэУЙУЪПаО»ОуІоҙшАҙөДУ°ПмЈ¬ұЈЦӨРЕПўХэИ·ҪвВлЎЈУРБҪЦЦН¬ІҪ·ҪКҪЈәУІН¬ІҪәНЦШН¬ІҪЎЈ УІН¬ІҪҪц·ўЙъФЪұЁОДҝӘКјКұЈ¬ФЪТ»ёцҝХПРЖЪјдЈ¬ЧЬПЯЙПөДЛщУРҝШЦЖЖчФЪТ»ёцSYNC_SEG¶ОҙУТюРФО»өҪПФРФО»өДМшұдСШЙПЈ¬іхКј»ҜЧФјәөДО»ЦЬЖЪ¶ЁКұЈ¬ЦҙРРТ»ҙОУІН¬ІҪЎЈ ЦШН¬ІҪ·ўЙъФЪұЁОДО»Бч·ўЛНЖЪјдЈ¬ГҝТ»ёцТюРФО»өҪПФРФО»МшұдСШәуЎЈЦШН¬ІҪёщҫЭТэЖрН¬ІҪұЯСШөДПаО»ОуІоЈ¬ТӘГҙФцјУtTSEG1Ј¬ТӘГҙјхЙЩ tTSEG2Ј¬К№ІЙСщөгҙҰУЪЗЎөұөДО»ЦГЎЈН¬ІҪұЯСШөДПаО»ОуeЈ¬УЙПа¶ФУЪН¬ІҪұЯСШөДО»ЦГ¶ш¶ЁЈ¬ТФПөНіКұЦУЦЬЖЪЈЁTSCLЈ©ЎЈЖдЛь¶Ёј°ЦШН¬ІҪҙҰАн·ҪКҪИзПВЈә e=0Ј¬Н¬ІҪұЯСШ·ўЙъФЪSYNC_SEGДЪЈ» e>0Ј¬Н¬ІҪұЯСШ·ўЙъФЪTSEG1ДЪЈ» e<0Ј¬Н¬ІҪұЯСШ·ўЙъФЪTSEG2ДЪЎЈ Из№ыТэЖрЦШН¬ІҪөДұЯСШПаО»ОуІоeөД·щЦөРЎУЪ»төИУЪtSJWұаіМКэЦөЈ¬ФтөГН¬ІҪөјЦВО»КұјдЛх¶М»тСУіӨЈ¬УлУІН¬ІҪөДЧчУГТ»СщЈ»Из№ыeОӘХэЦөЈ¬ЗТ·щЦөҙуУЪtSJWЈ¬ФтФцјУtTSEG1ЦөОӘtSJWЈ»Из№ыeОӘёәЦөЈ¬ЗТ·щЦөҙуУЪtSJWЈ¬ФтјхЙЩЦөОӘtSJWЎЈ 2 ІОКэјЖЛг№жФт ІОКэИ·¶ЁФӯФтОӘЈәұЈЦӨПөНіФЪј«¶Л¶сБУМхјюөДБҪҪЪөгјдЈ¬ДЬ№»ХэИ·ҪУКХІўҪвВлНшВзЙПөДРЕПўЦЎЎЈј«¶Л¶сБУМхјюКЗЦёХвБҪёцҪЪөгөДЦУХсЖ«ІоФЪПөНіИЭИМЖ«Іој«ПЮөДБҪ¶ЛЈ¬ІўЗТБҪҪЪөгјдҫЯУРЧоҙуөДҙ«КдСУіЩЎЈФЪГ»УРФлТфёЙИЕөДХэіЈНЁРЕЗйҝцПВЈ¬ПаО»ОуІоАЫјЖөДЧо»өЗйҝцКЗЈ¬ЦШН¬ІҪұЯСШЦ®јдјдёфУР10ёцО»ЦЬЖЪЎЈХвКЗ¶ЁТе SJWЧоРЎЦөөДМхјюЎЈ ФЪКөјКөДНЁРЕПөНіЦРЈ¬ФлТфёЙИЕКЗІ»ҝЙұЬГвөДЎЈУЙУЪФлТфёЙИЕЈ¬ҝЙДЬ»бөјЦВЦШН¬ІҪұЯСШЦ®јдөДјдёфі¬№э10ёцО»ЦЬЖЪЈ¬ҝЙДЬҪшИлҙнОуҙҰАнДЈКҪЎЈФЪХвЦЦЗйҝцПВЈ¬УЙУЪН¬ІҪұЯСШЦ®јдөДКұјдұИҪПіӨЈ¬ЛщТФұЈЦӨГҝТ»О»¶јДЬ№»И·ЗРөШИЎСщҫНёьјУЦШТӘЎЈИз№ыІ»ДЬ№»И·ЗРөШИЎСщЈ¬Ҫ«»бөјЦВјмІвөҪҙнОуІўҪшРРҙнОуҙҰАнЎЈ ҝјВЗёч·ҪГжөДУ°ПмЈ¬О»¶ЁКұІОКэөДЙиЦГ№«КҪИзПВЈә ўЩ1ИЎСщөгДЈКҪ 
ўЪ3ИЎСщөгДЈКҪ 
ФЪјЖЛгSJWminКұЈ¬ИЎҙуУЪјЖЛгКэЦөөДЧоРЎХыКэЈ»ФЪјЖЛгTSEG2maxКұЈ¬ИЎРЎУЪјЖЛгКэЦөөДЧоҙуХыКэЎЈУЙ№«КҪЈЁ15Ј©Ў«ЈЁ18Ј©ҝЙјыЈ¬SJWәН TSEG2УЙNBFЎўҰӨfЎўPROP·Цұрҫц¶ЁЎЈјЖЛгөГөҪSJWәНTSEG2әуЈ¬УЙ№«КҪЈЁ9Ј©ҝЙТФөГөҪTSEG1ЎЈёщҫЭSJA1000өДјДҙжЖчЛөГчЈ¬ҝЙТФөГөҪҫЯМејДҙжЖчөДЙиЦГКэЦөЎЈ 3 ІОКэјЖЛгІҪЦиј°ҫЩАэ ДіCANНЁРЕПөНіЈ¬ІЙУГ1ёцИЎСщөгДЈКҪЈ¬ЖдЛьІОКэЦёұкИзұн4ЛщБРЎЈ ұн4
ўЩИ·¶ЁҝЙДЬөДBRPЎўNBTәНPROPЎЈ УЙ№«КҪЈЁ1Ј©ЎўЈЁ3Ј©ЎўЈЁ4Ј©ј°ЈЁ9Ј©өГөҪ NBT=1/(fbitЎӨTSCL)=fCLK/(2fbitЎӨBRP) ЛщТФУР NBTЎӨBRP=fCLK/2fbit ЈЁ19Ј© Ҫ«ІОКэҙъИ빫КҪЈЁ19Ј©өГөҪNBTЎӨBRPөДЦөОӘ48Ј¬¶шNBTИЎЦөОӘ3Ў«25Ј¬ЛщТФNBTәНBRPЛщУРҝЙДЬөДЧйәПИзұн5ЛщБРЎЈ ұн5
ўЪјЖЛгNBTminәНNBTmaxЎЈУЙ№«КҪЈЁ15-1Ј©ЎўЈЁ18-1Ј©ЎўЈЁ19Ј©ЎўЈЁ14Ј©ј°ЈЁ3Ј©НЖіц NBTЎЭ 
№«КҪЈЁ22Ј© 
ҙъИлКэҫЭЈ¬јЖЛгөГөҪ8.31ЎЬNBTЎЬ17.9ЎЈФӯФтЙПСЎ12әН16¶јҝЙТФЈ¬ОӘБЛ·ҪұгИЎөГСщөгЈ¬ОТГЗИЎҪПҙуөДЦө16ЎЈ ўЫёщҫЭ№«КҪЈЁ15-1Ј©јЖЛгSJWminЈ¬Изұн6ЛщБРЎЈ ўЬёщҫЭ№«КҪЈЁ17-1Ј©јЖЛгTSEG2minЈ¬Изұн6ЛщБРЎЈ ўЭёщҫЭ№«КҪЈЁ18-1Ј©јЖЛгTSEG2maxЈ¬Изұн6ЛщБРЎЈ ўЮИ·¶ЁјДҙжЖчЙиЦГКэЦөЈ¬Изұн7ЛщБРЎЈ ұн6
ұн7
4 ҪбВЫ ФЪІ»Н¬өДПөНіУҰУГЦРЈ¬ҝЙТФёщҫЭЛщК№УГөДКұЦУЖөВКЎўКұЦУРЕәЕөДЖөВКЖ«ІоЎўНЁРЕІЁМШВКј°Чоҙуҙ«КдҫаАлөИТтЛШЈ¬¶ФНЁРЕҝШЦЖЖчО»¶ЁКұІОКэҪшРРУЕ»ҜИ·¶ЁЎЈИ·¶ЁөГөҪөДІОКэҝЙТФМбёЯНЁРЕПөНіХыМеРФДЬЈ¬ХвК№CANЧЬПЯУЕКЖёьјУГчПФЈ¬ТФККәПёьјУ№г·әөДУҰУГЎЈ ІОҝјОДПЧ 1. PHILIPS №«Лҫ Determination of Bit TimingParameters for the CAN Controller SJA1000 1997 2. Philips№«Лҫ DATA SHEET SJA1000 Stand-alone CANController 2000 3. ЪщҝнГч CAN ЧЬПЯФӯАнәНУҰУГПөНіЙијЖ 1996 Чч ХЯЈәұұҫ©И«В·НЁРЕРЕәЕСРҫҝЙијЖФә ОвУА Аҙ ФҙЈәөҘЖ¬»ъУлЗ¶ИлКҪПөНіУҰУГ2003ЈЁ10Ј© |

НшУСЖАВЫ