
ЙигкЭМЯёДЋ ИаЦїЕФ9ИіжЊЪЖЕу
|
ЕфаЭЭМЯёДЋ Иа ЦїЕФКЫаФЪЧCCDЕЅдЊЃЈcharge-coupled deviceЃЌЕчКЩёю КЯЦїМўЃЉЛђБъзМC M O SЕЅдЊЃЈcomplementary meta-oxide semiconductorЃЌЛЅВЙН№ЪєбѕЛЏЮяАы ЕМ ЬхЃЉЁЃCCDКЭC M O SДЋ Иа ЦїОпгаРрЫЦЕФЬиадЃЌЫќУЧБЛЙуЗКгІгУгкЩЬвЕЩуЯёЛњЩЯЁЃВЛЙ§ЃЌЯжДњЖрЪ§ДЋ Иа ЦїОљЪЙгУC M O SЕЅдЊЃЌетжївЊЪЧГігкжЦдьЗНУцЕФПМТЧЁЃДЋ Иа ЦїКЭЙтбЇЦїМўГЃГЃећКЯдквЛЦ№гУгкжЦдьОЇЦЌМЖЩуЯёЛњЃЌетжжЩуЯёЛњБЛгУдкРрЫЦгкЩњЮябЇЛђЯдЮЂОЕбЇЕШСьгђЃЌШчЭМ1ЫљЪОЁЃ
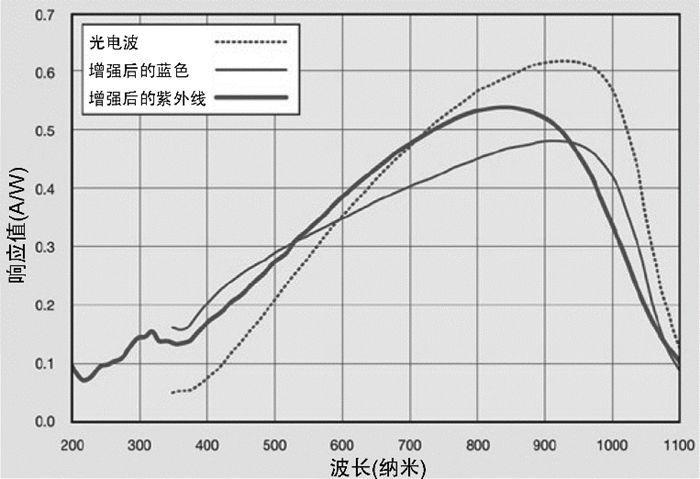
ЭМ1ЃКећКЯСЫЙтбЇЦїМўКЭбеЩЋЙ§ТЫЦїЕФЭМЯёДЋ Иа ЦїЕФГЃгУХХСа ЭМЯёДЋ Иа ЦїЪЧЮЊТњзуВЛЭЌгІгУЕФЬиЪтФПБъЖјЩшМЦЕФЃЌЫќЬсЙЉСЫВЛЭЌМЖБ№ЕФСщУєЖШКЭжЪСПЁЃЯывЊЪьЯЄИїжжДЋ Иа ЦїЃЌПЩВщдФЦфГЇЩЬаХЯЂЁЃР§ШчЃЌЮЊСЫдкЙшЛљФЃКЭЖЏЬЌЯьгІЃЈгУгкЪЕЯжЙтЧПЖШКЭбеЩЋМьВтЃЉжЎМфгавЛИізюКУЕФелжаЃЌЖдвЛИіЬиЖЈЕФАы ЕМ ЬхжЦдьЙ§ГЬЃЌашгХЛЏУПИіЙтЕчЖў МЋ ЙмДЋ Иа ЦїЕЅЮЛЕФДѓаЁКЭзщГЩГЩЗжЁЃ ЖдМЦЫуЛњЪгОѕЖјбдЃЌВЩбљРэТлЕФаЇЙћОпгаживЊвтвхЃЌШчФПБъГЁОАЕФЯёЫиЗЖЮЇОЭЛсгУЕНNyquistЦЕТЪЁЃДЋ Иа ЦїЗжБцТЪКЭЙтбЇЦїМўФмвЛЦ№ЮЊУПИіЯёЫиЬсЙЉзуЙЛЕФЗжБцТЪЃЌвдБуЖдИааЫШЄЬиеїНјааГЩЯёЃЌвђДЫгаетбљЕФНсТлЃКаЫШЄЬиеїЕФВЩбљЃЈЛђГЩЯёЃЉЦЕТЪгІИУЪЧживЊЯёЫиЃЈЖдИааЫШЄЕФЬиеїЖјбдЃЉжазюаЁЯёЫиДѓаЁЕФСНБЖЁЃЕБШЛЃЌЖдГЩЯёОЋЖШЖјбдЃЌСНБЖЕФЙ§ВЩбљНіНіЪЧвЛИізюЕЭФПБъЃЌдкЪЕМЪгІгУжаЃЌВЂВЛШнвзОіЖЈЕЅЯёЫиПэЖШЕФЬиеїЁЃ ЖдгкИјЖЈЕФгІгУЃЌвЊШЁЕУзюКУЕФНсЙћЃЌашаЃзМЩуЯёЛњЯЕЭГЃЌвдБудкВЛЭЌЙтееКЭОрРыЬѕМўЯТШЗЖЈЯёЫиЮЛЩюЖШЃЈbit depthЃЉЕФДЋ Иа ЦїдыЩљвдМАЖЏЬЌЗЖЮЇЁЃЮЊСЫФмДІРэДЋ Иа ЦїЖдШЮКЮбеЩЋЭЈЕРЫљВњЩњЕФдыЩљКЭЗЧЯпадЯьгІЃЌВЂЧвМьВтКЭаЃе§ЯёЫиЛЕЕуЁЂДІРэМИКЮЪЇецЕФНЈФЃЃЌашЗЂеЙКЯЪЪЕФДЋ Иа ЦїДІРэЗНЗЈЁЃШчЙћЪЙгУВтЪдФЃЪНРДЩшМЦвЛИіМђЕЅБъЖЈЗНЗЈЃЌетжжЗНЗЈдкЛвЖШЁЂбеЩЋЁЂЬиеїЯёЫиДѓаЁЕШЗНУцОпгагЩЯИЕНДжЕФНЅБфЃЌОЭЛсПДЕННсЙћЁЃ 1ЁЂДЋ Иа ЦїВФСЯ ЙшжЦЭМЯёДЋ Иа ЦїгІгУзюЙуЃЌЕБШЛвВЛсЪЙгУЦфЫћВФСЯЃЌБШШчдкЙЄвЕКЭОќЪТгІгУжаЛсгУяиЃЈGaЃЉРДИВИЧБШЙшИќГЄЕФКь ЭтВЈГЄЁЃВЛЭЌЕФЩуЯёЛњЃЌЦфЭМЯёДЋ Иа ЦїЕФЗжБцТЪЛсгаЫљВЛЭЌЁЃДгЕЅЯёЫиЙтЕчОЇ Ьх ЙмЩуЯёЛњЃЈЫќЭЈЙ§вЛЮЌжБЯпЩЈУшеѓСагУгкЙЄвЕгІгУЃЉЃЌЕНЦеЭЈЩуЯёЛњЩЯЕФЖўЮЌГЄЗНаЮеѓСаЃЈЫљгаЕНЧђаЮећСаЕФТЗОЖОљгУгкИпЗжБцТЪГЩЯёЃЉЃЌЖМгаПЩФмгУЕНЁЃЃЈБОеТзюКѓЛсНщЩмДЋ Иа ЦїХфжУКЭЩуЯёЛњХфжУЃЉЁЃ ЦеЭЈГЩЯёДЋ Иа ЦїВЩгУCCDЁЂC M O SЁЂBSIКЭFoveonЗНЗЈНјаажЦдьЁЃЙшжЦЭМЯёДЋ Иа ЦїОпгавЛИіЗЧЯпадЕФЙтЦзЯьгІЧњЯпЃЌетЛсКмКУЕиИажЊЙтЦзЕФНќКь ЭтВПЗжЃЌЕЋЖдРЖЩЋЁЂзЯЩЋКЭНќзЯЭтВПЗжОЭИажЊЕУВЛКУЃЈШчЭМ2ЫљЪОЃЉЁЃ
ЭМ2ЃКМИжжЙшЙтЕчЖў МЋ ЙмЕФЕфаЭЙтЦзЯьгІЁЃПЩвдзЂвтЕНЃЌЙтЕчЖў МЋ Ймдк900ФЩУзИННќЕФНќКь ЭтЗЖЮЇФк ОпгаИпЕФУєИаЖШЃЌЖјдкКсПч400ФЩУзЁЋ700ФЩУзЕФПЩМћЙтЗЖЮЇФкОпгаЗЧЯпадЕФУєИаЖШЁЃ гЩгкБъзМЕФЙшЯьгІЕФдЕЙЪЃЌДгЩуЯёЛњжаШЅЕєIRТЫ ВЈ ЦїЛсдіМгНќКь ЭтЕФСщУєЖШЁЃЃЈЙтЦзЪ§ОнЭМЯёЕФЪЙгУвбЛёЕУOSIЙтЕчЙЩЗнгаЯоЙЋЫОЕФаэПЩЃЉ зЂвтЃЌЕБЖСШыдЪМЪ§ОнЃЌВЂНЋИУЪ§ОнРыЩЂЛЏГЩЪ§зжЯёЫиЪБЃЌЛсЕМжТЙшЙтЦзЯьгІЁЃДЋ Иа ЦїжЦдьЩЬдкетИіЧјгђзіСЫЩшМЦВЙГЅЃЌШЛЖјЃЌЕБИљОнгІгУБъЖЈЩуЯёЛњЯЕЭГВЂЩшМЦДЋ Иа ЦїДІРэЗНЗЈЪБЃЌгІИУПМТЧДЋ Иа ЦїЕФбеЩЋЯьгІЁЃ 2ЁЂДЋ Иа ЦїЙтЕчЖў МЋ ЙмдЊМў ЭМЯёДЋ Иа ЦїЕФЙиМќдкгкЙтЕчЖў МЋ ЙмЕФДѓаЁЛђдЊМўЕФДѓаЁЁЃЪЙгУаЁЙтЕчЖў МЋ ЙмЕФДЋ Иа ЦїдЊМўЫљВЖЛёЕФЙтзгЪ§СПУЛгаЪЙгУДѓЕФЙтЕчЖў МЋ ЙмЖрЁЃШчЙћдЊМўГпДчаЁгкПЩВЖЛёЕФПЩМћЙтВЈГЄЃЈШчГЄЖШЮЊ400ФЩУзЕФРЖЙтЃЉЃЌФЧУДЮЊСЫаЃе§ЭМЯёбеЩЋЃЌдкДЋ Иа ЦїЩшМЦжаБиаыПЫЗўЦфЫћЮЪЬтЁЃДЋ ИаЦїГЇЩЬЛЈЗбДѓСПОЋСІРДЩшМЦгХЛЏдЊМўДѓаЁЃЌвдШЗБЃЫљгаЕФбеЩЋФмЭЌЕШГЩЯёЃЈШчЭМ3ЫљЪОЃЉЁЃдкМЋЖЫЕФЧщПіЯТЃЌгЩгкШБЗІРлЛ§ЕФЙтзгКЭДЋ Иа ЦїЖСГідыЩљЃЌаЁЕФДЋ Иа ЦїПЩФмЖддыЩљИќМгУєИаЁЃШчЙћЖўМЋЗЂЙтЙмДЋ Иа ЦїдЊМўЬЋДѓЃЌФЧУДЙшВФСЯЕФПХСЃДѓаЁКЭЗбгУЛсдіМгЃЌетУЛгаШЮКЮгХЪЦПЩбдЁЃвЛАуЩЬвЕДЋ ИаЦїЩшБИОпгаЕФДЋ Иа ЦїдЊМўДѓаЁжСЩйЮЊ1ЦНЗНЮЂУзЃЌУПИіЩњВњГЇЩЬЛсВЛЭЌЃЌЕЋЮЊСЫТњзуФГаЉЬиЪтЕФашЧѓЛсгавЛаЉелжаЁЃ
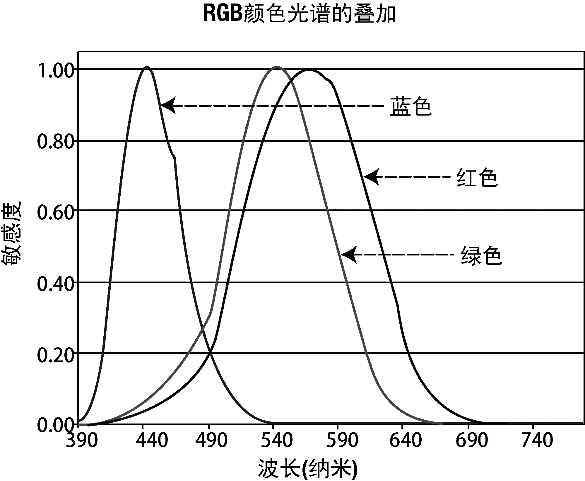
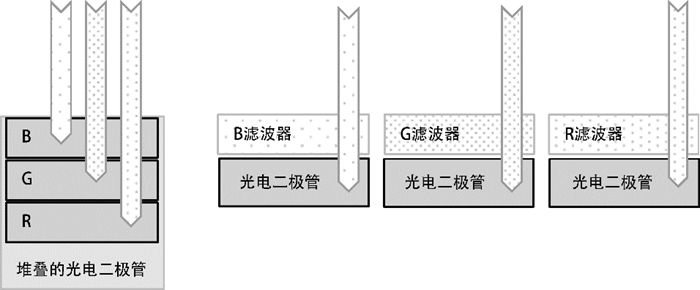
ЭМ3ЃКЛљБОбеЩЋЕФВЈГЄЗжХфЁЃзЂвтЃЌЛљБОбеЩЋЧјгђЯрЛЅжиЕўЃЌ ЖдЫљгаЕФбеЩЋЖјбдЃЌТЬЩЋЪЧвЛИіКмКУЕФЕЅЩЋЬцДњЦЗ 3ЁЂДЋ Иа ЦїХфжУЃКТэШќПЫЁЂFaveonКЭBSI ЭМ4ЯдЪОСЫЖрЙтЦзДЋ Иа ЦїЩшМЦЕФВЛЭЌЦЌФкХфжУЃЌАќРЈТэШќПЫКЭЖбЕўЗНЗЈЁЃдкТэШќПЫЗНЗЈжаЃЌбеЩЋЙ§ТЫЦїБЛзАдкУПИідЊМўЕФТэШќПЫФЃЪНЩЯЁЃFaveonДЋ Иа ЦїЖбЕўЗНЗЈвРРЕгкбеЩЋВЈГЄЩюЖШЩјЭИЕНАы ЕМ ЬхВФСЯЕФЮяРэГЩЗжЃЌЦфжаУПжжбеЩЋЖдЙшВФСЯНјааВЛЭЌГЬЖШЕФЩјЭИЃЌДгЖјЖдИїздЕФбеЩЋНјааГЩЯёЁЃећИідЊМўДѓаЁПЩЪЪгУгкЫљгабеЩЋЃЌЫљвдВЛашвЊЮЊУПжжбеЩЋЗжБ№ХфжУдЊМўЁЃ
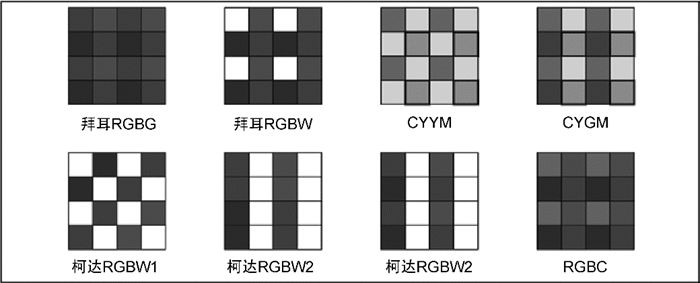
ЭМ4ЃКЃЈзѓЭМЃЉЖбЕўRGBдЊМўЕФFoveonЗНЗЈЃКдкУПИідЊМўЮЛжУЖМгаRGBбеЩЋЃЌ ВЂдкВЛЭЌЕФЩюЖШЮќЪеВЛЭЌЕФВЈГЄЃЛЃЈгвЭМЃЉБъзМЕФТэШќПЫдЊМўЃКдкУПИіЙтЕчЖў МЋ ЙмЩЯУцЗХжУвЛИіRGBТЫ ВЈ ЦїЃЌУПИіТЫ ВЈ ЦїжЛдЪаэЬиЖЈЕФВЈГЄДЉЙ§УПИіЙтЕчЖў МЋ Йм ЗДЯђееУїЃЈback-side illuminatedЃЌBSIЃЉДЋ Иа ЦїНсЙЙОпгаИќДѓЕФдЊМўЧјгђЃЌВЂЧвУПИідЊМўвЊОлМЏИќЖрЕФЙтзгЃЌвђЖјдкОЇСЃЩЯжиаТВМжУСЫДЋ Иа ЦїНгЯпЁЃ ДЋ Иа ЦїдЊМўЕФВМжУвВгАЯьЕНбеЩЋЯьгІЁЃР§ШчЃЌЭМ5ЯдЪОСЫЛљБОбеЩЋЃЈRЁЂGЁЂBЃЉДЋ Иа ЦївдМААзЩЋДЋ Иа ЦїЕФВЛЭЌХХСаЃЌЦфжаАзЩЋДЋ Иа ЦїЃЈWЃЉгавЛИіЗЧГЃЧхЮњЛђЗЧВЪЩЋЕФбеЩЋТЫ ВЈ ЦїЁЃДЋ Иа ЦїЕФХХСаПМТЧЕНСЫвЛЖЈЗЖЮЇЕФЯёЫиДІРэЃЌШчдкДЋ Иа ЦїЖдвЛИіЯёЫиаХЯЂЕФДІРэЙ§ГЬжаЃЌЛсзщКЯдкСкНќдЊМўЕФВЛЭЌХфжУжаЫљбЁШЁЕФЯёЫиЃЌетаЉЯёЫиаХЯЂЛсгХЛЏбеЩЋЯьгІЛђПеМфбеЩЋЗжБцТЪЁЃЪЕМЪЩЯЃЌФГаЉгІгУНіНіЪЙгУдЪМЕФДЋ Иа ЦїЪ§ОнВЂжДааЦеЭЈЕФДІРэЙ§ГЬРДдіЧПЗжБцТЪЛђепЙЙдьЦфЫћбеЩЋЛьКЯЮяЁЃ
ЭМ5ЃКдЊМўбеЩЋЕФМИИіВЛЭЌТэШќПЫХфжУЃЌАќРЈАзЩЋЁЂЛљБОRGBбеЩЋКЭДЮвЊCYMдЊМўЁЃ УПжжХфжУЮЊДЋ ИаЦїДІРэЙ§ГЬгХЛЏбеЩЋЛђПеМфЗжБцТЪЬсЙЉСЫВЛЭЌЕФЗНЗЈЃЈЭМЯёРДздгкЁЖBuilding Intelligent SystemsЁЗвЛЪщЃЌВЂЕУЕНIntelГіАцЩчЕФЪЙгУаэПЩЃЉЁЃ ећИіДЋИа ЦїЕФДѓаЁвВОіЖЈСЫОЕЭЗЕФДѓаЁЁЃвЛАуРДЫЕЃЌОЕЭЗдНДѓЭЈЙ§ЕФЙтдНЖрЃЌвђДЫЃЌЖдЩугАгІгУЖјбдЃЌНЯДѓЕФДЋИа ЦїФмИќКУЕиЪЪгУгкЪ§зжЩуЯёЛњЁЃСэЭтЃЌдЊМўдкПХСЃЩЯХХСаЕФзнКсБШЃЈa s p e c t r a t i oЃЉОіЖЈСЫЯёЫиЕФМИКЮаЮзДЃЌШчЃЌ4ЃК3КЭ3:2ЕФзнКсБШЗжБ№гУгкЪ§зжЩуЯёЛњКЭ35КСУзЕФНКЦЌЁЃДЋ ИаЦїХфжУЕФЯИНкжЕЕУЖСепШЅРэНтЃЌетбљВХФмЙЛЩшМЦГізюКУЕФДЋ ИаЦїДІРэЙ§ГЬКЭЭМЯёдЄДІРэГЬађЁЃ 4ЁЂЖЏЬЌЗЖЮЇКЭдыЩљ ЕБЧАЃЌзюЯШНјЕФДЋ ИаЦїУПИібеЩЋЕЅдЊФмЬсЙЉжСЩй8ИіБШЬиЮЛЃЌЭЈГЃЪЧ12ЁЋ14ИіБШЬиЮЛЁЃДЋ ИаЦїдЊМўашвЊЛЈЗбПеМфКЭЪБМфРДОлМЏЙтзгЃЌЫљвдНЯаЁЕФдЊМўБиаыОЙ§ОЋаФЩшМЦЃЌвдБмУтВњЩњвЛаЉЮЪЬтЁЃдыЩљПЩФмРДздгкЫљгУЕФЙтбЇдЊМўЁЂбеЩЋТЫ ВЈ ЦїЁЂДЋ ИаЦїдЊМўЁЂдівцКЭA/DзЊЛЛЦїЁЂКѓЦкДІРэЙ§ГЬЛђепбЙЫѕЗНЗЈЕШЁЃДЋ ИаЦїЕФЖСГідыЩљвВЛсгАЯьЕНЪЕМЪЕФЗжБцТЪЃЌвђЮЊУПИіЯёЫиЕЅдЊДгДЋ ИаЦїжаЖСГідйДЋЕНA/DзЊЛЛЦїжаЃЌДгЖјзщГЩЪ§зжаЮЪНЕФааКЭСаЃЌвдБугУгкЯёЫизЊЛЛЁЃдНКУЕФДЋ ИаЦїЛсВњЩњдНЩйЕФдыЩљЃЌЭЌЪБЛсЕУЕНИќИпаЇЕФБШЬиЗжБцТЪЁЃIbenthal ЕФЙЄзїЪЧНЕдыЗНУцЕФКУЮФЯзЁЃ СэЭтЃЌДЋ ИаЦїЙтзгЮќЪеЖдУПжжбеЩЋЛсгаЫљВЛЭЌЃЌЖдРЖЩЋгаПЩФмгааЉЮЪЬтЃЌМДЖдгкНЯаЁЕФДЋ ИаЦїГЩЯёЖјбдетЪЧзюФбЕФвЛжжбеЩЋЁЃдкФГаЉЧщПіЯТЃЌЩњВњЩЬЛсЪдЭМдкДЋ ИаЦїжаЮЊУПжжбеЩЋФкНЈвЛИіМђЕЅЕФйЄТэЧњЯпаое§ЗНЗЈЃЌЕЋетжжЗНЗЈВЂВЛжЕЕУЬсГЋЁЃдкЖдВЪЩЋгаашЧѓЕФгІгУжаЃЌПЩвдПМТЧЩЋЖШЩшБИФЃаЭКЭбеЩЋЙмРэЃЌЩѕжСШУДЋИа ЦїЕФУПжжбеЩЋЭЈЕРОпгаЗЧЯпадЬиеїВЂНЈСЂвЛЯЕСаМђЕЅЕФаЃе§ВщевБэЃЈLookup Table, LUTЃЉзЊЛЛЁЃ 5ЁЂДЋ ИаЦїДІРэ ДЋИа ЦїДІРэгУгкДгДЋИа ЦїеѓСажаШЅТэШќПЫВЂОлМЏЯёЫиЃЌвВгУгкаЃе§ИажЊшІДУЁЃдкетвЛНкЮвУЧЛсЬжТлДЋ ИаЦїДІРэЛљДЁЁЃ ЭЈГЃдкУПИіГЩЯёЯЕЭГжаЖМгавЛИізЈгаЕФДЋ ИаЦїДІРэЦїЃЌАќРЈвЛИіПьЫйHWДЋ ИаЦїНгПкЁЂгХЛЏЕФГЌГЄжИСюМЏЃЈvery long instruction word,VLIWЃЉЁЂЕЅжИСюЖрЪ§ОнСїЃЈsingle instruction multiple data, SIMDЃЉжИСювдМАОпгаЙЬЖЈЙІФмЕФгВМўФЃПщЃЌетаЉЙІФмЪЧЮЊСЫНтОіДѓЙцФЃВЂааЯёЫиДІРэЫљдьГЩЕФЙЄзїИКдиЁЃЭЈГЃЃЌДЋИа ЦїДІРэЙ§ГЬЭИУїЧвзд ЖЏ ЛЏЃЌВЂгЩГЩЯёЯЕЭГЕФЩњВњГЇЩЬЩшжУЃЌРДздДЋ ИаЦїЕФЫљгаЭМЯёОљвдЭЌбљЕФЗНЪНДІРэЁЃвВДцдкгУгкЬсЙЉдЪМЪ§ОнЕФЦфЫћЗНЪНЃЌетаЉЪ§ОндЪаэеыЖдгІгУРДЖЈжЦДЋИа ЦїДІРэЙ§ГЬЃЌОЭЯёЪ§зжЩугАФЧбљЁЃ 6ЁЂШЅТэШќПЫ ИљОнВЛЭЌЕФДЋ ИаЦїдЊМўХфжУЃЈШчЭМ5ЫљЪОЃЉЃЌПЩРћгУИїжжШЅТэШќПЫЫуЗЈНЋдЪМДЋ ИаЦїЪ§ОнЩњГЩзюжеЕФRGBЯёЫиЁЃLosson &YangЛЙгаLiЕШШЫЗжБ№ИјГіСЫСНЦЊЗЧГЃКУЕФзлЪіЮФЯзЃЌетаЉЮФЯзНщЩмСЫИїжжЗНЗЈвдМАЫљУцСйЕФЬєеНЕШЁЃ ШЅТэШќПЫЕФвЛИіжївЊЬєеНжЎвЛЪЧЯёЫиВхжЕЃЌЦфзїгУЪЧНЋСкНќЕЅдЊЕФбеЩЋЭЈЕРзщКЯГЩЕЅИіЯёЫиЁЃдкИјЖЈДЋ ИаЦїдЊМўХХСаЕФМИКЮаЮзДвдМАЕЅдЊХХСаЕФзнКсБШЕФЬѕМўЯТЃЌетЪЧвЛИіживЊЕФЮЪЬтЁЃвЛИігыжЎЯрЙиЕФЮЪЬтЪЧбеЩЋЕЅдЊЕФМгШЈЮЪЬтЃЌШчдкУПИіRGBЯёЫижаУПжжбеЩЋгІИУеМЖрЩйБШР§ЁЃвђЮЊдкТэШќПЫДЋ ИаЦїжаЃЌПеМфдЊМўЗжБцТЪДѓгкзюжезщКЯЕФRGBЯёЫиЗжБцТЪЃЌФГаЉгІгУашвЊдЪМДЋИа ЦїЪ§ОнЃЌвдБуОЁПЩФмРћгУЫљгаЕФОЋЖШКЭЗжБцТЪЃЌЛђепгааЉДІРэвЊУДашвЊдіЧПгааЇЕФЯёЫиЗжБцТЪЃЌвЊУДашвЊИќКУЕиЪЕЯжПеМфОЋШЗЕФбеЩЋДІРэКЭШЅТэШќПЫДІРэЁЃ 7ЁЂЛЕЯёЫиЕФаЃе§ ЯёL C D Яд ЪО ЦївЛбљЃЌДЋ ИаЦївВПЩФмЛсгаЛЕЯёЫиЁЃЭЈЙ§дкЩуЯёЛњФЃПщЛђЧ§ЖЏГЬађжаЬсЙЉашвЊаЃе§ЕФЛЕЯёЫизјБъЃЌЙЉгІЩЬПЩвддкЙЄГЇаЃе§ДЋ ИаЦїЃЌВЂЮЊвбжЊЕФШБЯнЬсЙЉвЛИіДЋ ИаЦїШБЯнЭМЁЃдкФГаЉЧщПіЯТЃЌздЪЪгІЕФШБЯнаЃе§ЗНЗЈЛсгУдкДЋ ИаЦїЩЯЃЌвдБуМрПиСкНќЯёЫиЕуРДЗЂЯжШБЯнЃЌШЛКѓаЃе§вЛЖЈЗЖЮЇФкЕФШБЯнРраЭЃЌБШШчЕЅЯёЫиШБЯнЁЂСаЛђааШБЯнвдМАРрЫЦ2ЁС2Лђ3ЁС3ЕФПщзДШБЯнЁЃЮЊСЫЪЕЪБбАевшІДУЃЌЩуЯёЛњЧ§ЖЏвВПЩЬсЙЉздЪЪгІЕФШБЯнЗжЮіЃЌдкЩуЯёЛњЕФЦєЖЏВЫЕЅжаПЩФмЛсЬсЙЉвЛИіЬиЪтЕФВЙГЅПижЦЁЃ 8ЁЂбеЩЋКЭееУїаЃе§ гаБивЊНјаабеЩЋаЃе§вдБуЦНКтзмЕФбеЩЋОЋШЗЖШКЭАзЦНКтЁЃШчЭМ1-2ЫљЪОЃЌЙшДЋИа ЦїЩЯЖдКьЩЋКЭТЬЩЋетСНжжбеЩЋЭЈГЃКмУєИаЃЌЕЋЪЧЖдРЖЩЋШДВЛУєИаЃЌвђДЫЃЌРэНтКЭБъЖЈДЋИа ЦїЪЧЕУЕНзюОЋШЗбеЩЋЕФЛљБОЙЄзїЁЃ ДѓЖрЪ§ЭМЯёДЋ ИаЦїЕФДІРэЦїАќКЌСЫгУгкЙтдЮаЃе§ЕФМИКЮДІРэЦїЃЌетдкЭМЯёЕФБпдЕБэЯжЮЊЙтееИќАЕЁЃаЃе§ЛљгкМИКЮХЄЧњКЏЪ§ЃЌПЩПМТЧПЩБрГЬЕФЙтееЙІФмРДдіМгГЏЯђБпдЕЕФЙтееЃЌеташвЊдкГіГЇЧАНјааБъЖЈЃЌвдБугыЙтбЇЕФЙтдЮФЃЪНЯрЦЅХфЁЃ 9ЁЂМИКЮаЃе§ ОЕЭЗПЩФмЛсгаМИКЮЯрВюЛђГЏБпдЕЗЂЩњХЄЧњЃЌВњЩњОЖЯђЪЇецЕФЭМЯёЁЃЮЊСЫНтОіОЕЭЗЛћБфЃЌДѓЖрЪ§ГЩЯёЯЕЭГОпгазЈгУЕФДЋ ИаЦїДІРэЦїЃЌЫќгавЛИігВМўМгЫйЕФЪ§зжХЄЧњдЊМўЃЌРрЫЦгкG P UЩЯЕФЮЦРэВЩбљЦїЁЃдкЙЄГЇОЭЛсеыЖдЙтбЇЦїМўЕФМИКЮаЃе§НјаааЃзМВЂБрГЬЁЃ
AO-Electronics АС вМ Еч зг ЙйЭјЃКwww.aoelectronics.com жаЮФЭјЃКwww.aoelectronics.cn
|


ЭјгбЦРТл