
ЛљгкЬсЩ§аЁВЈЕФКСУзВЈаХКХЪЕЪБШЅды
ЗЂВМЪБМфЃК2011-1-26 18:43
ЗЂВМепЃКconniede
|
1 в§бд КСУзВЈОпгаПЙИЩШХФмСІЧПЁЂОЋЖШИпЁЂЕЭбіНЧЬНВтадФмКУЁЂФмЙЛДЉЭИЕШРызгЬхЕШгХЕуЃЌвбЙуЗКгІгУгкОќЪТЁЂУёгУЕШСьгђЁЃдкЬьЯпПкОЖЯрЭЌЬѕМўЯТЃЌ3mmВЈЖЮКСУзВЈЬНВтЦїЯрЖдЦфЫќВЈЖЮОпгаВЈЪјеЁЂЬНВтОрРыдЖЁЂФПБъЖЈЮЛзМШЗЕШгХЕуЁЃШЛЖјЬНВтЦїЛиВЈаХжаКЌгаИїжждыЩљИЩШХЃЌашНјааШЅдыДІРэЃЌбЁгУЪЪЕБЕФШЅдыЗНЗЈПЩОЁСПМѕЩйдыЩљЖдФПБъЪЖБ№НсЙћЕФгАЯьЁЃаЁВЈЗжЮігыИЕСЂвЖЗжЮіЯрБШЃЌОпгаСМКУЕФЪБЦЕОжВПЬиадКЭЖрЗжБцЗжЮіЬиадЃЌдкШЅдыСьгђгІгУЙуЗКЁЃДЋЭГаЁВЈЕФЙЙдьЪЧвдИЕСЂвЖБфЛЛЮЊЛљДЁЃЌЖјЬсЩ§ИёЪНаЁВЈБфЛЛдђЪЧжБНгдкЪБгђЗжЮіЮЪЬтЃЌЭъШЋЭбРыСЫИЕСЂвЖБфЛЛ,ВЂЧвЫљгаДЋЭГаЁВЈЖМПЩвдЭЈЙ§ЬсЩ§ЗНЗЈЙЙдьГіРДЁЃKoichi KuzumeЕШШЫЪЕЯжСЫЛљгкFPGAЕФЬсЩ§аЁВЈЪЕЪБаХКХДІРэ;A.R.CalderbankЁЂMichael D.AdamsЕШбаОПСЫећЪ§аЁВЈБфЛЛМАећЪ§ЬсЩ§аЁВЈБфЛЛ;ЙњФкКмЖрШЫбаОПСЫЛљгкЬсЩ§ИёЪНаЁВЈБфЛЛЕФаХКХШЅдыЁЃВЩгУЬсЩ§аЁВЈНјаааХКХШЅдыЃЌдЫЫуЫйЖШПьЃЌКФЗбДцДЂПеМфЩйЃЌПЩЪЕЯжећЪ§аЁВЈБфЛЛЃЌвзТњзуаХКХДІРэЕФЪЕЪБадвЊЧѓЁЃ 3mmВЈЖЮКСУзВЈЬНВтЦїаЁаЭЛЏгІгУЪБаХКХДІРэЯЕЭГЕФгВМўЦНЬЈИЁЕуДІРэФмСІВюЃЌвЊЧѓШЅдыЫуЗЈзюКУЮЊећЪ§МфЕФдЫЫуЃЌПМТЧаХКХДІРэЕФЪЕЪБадЃЌЫуЗЈЕФИДдгЖШвЊЪЪКЯгВМўЦНЬЈЕФдЫЫуЫйЖШЁЃБОЮФбЁгУ5/3аЁВЈдкЛљгкTMS320VC5509AаЭDSPЕФгВМўЦНЬЈЩЯЪЕЯжСЫКСУзВЈЬНВтЦїЛиВЈаХКХЕФЪЕЪБШЅдыДІРэЁЃ 2 ЬсЩ§аЁВЈБфЛЛ ЬсЩ§аЁВЈБфЛЛгЩШ§ИіЛљБОВНжшЙЙГЩЃК (1)ЗжНтЃЌНЋдЪМРыЩЂаХКХЗжИюЮЊСНИіЛЅВЛЯрНЛЕФзгМЏЃЌР§ШчНЋаХКХx(n)АДЮЛжУЗжЮЊЦцХМађСаxo(2n+1)КЭxe(2n)ЃЌМДГЃгУЕФlazyаЁВЈБфЛЛЁЃ (2)дЄВтЃЌгжГЦЖдХМЬсЩ§ЁЃЖЈвхдЄВтЫузгPРДВњЩњаЁВЈЯЕЪ§dЃЌЦфБэДяЪНЮЊЃКd=xo-P(xe)ЃЌМДгУxeШЅдЄВтxoВњЩњЕФЮѓВюЁЃгЩгкаХКХгаОжВПЯрЙиадЃЌаХКХФГвЛЕуЕФжЕПЩвдЭЈЙ§ЦфЯрСкЕФжЕОКЯЪЪЕФдЄВтЫузгРДдЄВтЃЌдЄВтЮѓВюОЭЪЧаХКХЕФИпЦЕаХЯЂЁЃ (3)ИќаТЃЌгжГЦдЪМЬсЩ§ЁЃЭЈЙ§ИќаТЫузгUВњЩњГпЖШЯЕЪ§cЃЌЦфБэДяЪНЮЊЃКc=xe+U(d)ЃЌМДгУdРДЕїећаХКХЕФЯТВЩбљxeЃЌЕУЕНаХКХЕФЕЭЦЕЗжСПЁЃвдЩЯШ§ИіВНжшЮЊЬсЩ§аЁВЈБфЛЛЕФЧАЯђБфЛЛЃЌЖјФцЯђБфЛЛжЛашИФБфЧАЯђБфЛЛЙЋЪНжаЕФе§ИККХКЭЕпЕЙМЦЫуВНжшДЮађЁЃ 5/3аЁВЈЪЧОпгаЖдГЦНсЙЙЕФЫЋе§НЛаЁВЈЃЌЦфЗжНтЖЫгыжиЙЙЖЫЕФТЫВЈЦїГЄЖШЗжБ№ЮЊ5КЭ3ЃЌЯћЪЇОиЖМЮЊ2ЃЌЙуЗКгІгУгкТЫВЈМАЭМЯёДІРэЕШСьгђЁЃЦфЬсЩ§ЯЕЪ§ЗжБ№ЮЊІС=-1/2ЃЌІТ=1/4,ПЩБэЪОЮЊ1/2n(nЮЊећЪ§)ЃЌдЫЫуЙ§ГЬжЛКЌгаМгЗЈКЭвЦЮЛдЫЫуЃЌДѓДѓМгПьСЫдЫЫуЫйЖШЃЌРћгкЭЈгУМЦЫуЛњвдЭтЕФгВМўЦНЬЈЕФЪЕЯжЁЃЛљгкећЪ§ЕФ5/3аЁВЈЫуЗЈВНжшЮЊЃК (1)xo(n)=x(2n+1)ЃЌxe(n)=x(2n) (2)d1(n)=xo(n)+int(ІС(xe(n)+xe(n+1))+1/2) (3)c1(n)=xe(n)+int(ІТ(d1(n)+d1(n-1))+1/2) Цфжаint(ЁЄ)БэЪОШЁећдЫЫуЁЃ 3 ЛиВЈаХКХШЅдыаЇЙћЗжЮі аЁВЈгђуажЕТЫВЈЗЈЪЕЯжМђЕЅЃЌМЦЫуСПаЁЃЌЪЧФПЧАгІгУзюЙуЗКЕФвЛжжаЁВЈШЅдыЫуЗЈЃЌПЩЗжЮЊШэуажЕКЏЪ§ЗЈКЭгВуажЕКЏЪ§ЗЈЁЃШэуажЕКЏЪ§ЗЈЪЧНЋОјЖджЕаЁгкуажЕЕФаЁВЈЯЕЪ§ЬцЛЛЮЊСуЃЌОјЖджЕДѓгкуажЕЕФаЁВЈЯЕЪ§гУуажЕРДЫѕМѕЃЌЦфБэДяЪНЮЊЃК  гВуажЕКЏЪ§ЗЈЪЧНЋОјЖджЕаЁгкуажЕЕФаЁВЈЯЕЪ§ЬцЛЛЮЊСуЃЌОјЖджЕДѓгкуажЕЕФаЁВЈЯЕЪ§БЃГжВЛБфЃЌЦфБэДяЪНЮЊЃК 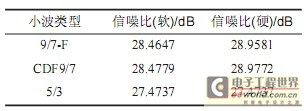 Бэ1 е§ЯваХКХИїаЁВЈШЅдыаЇЙћЗТец 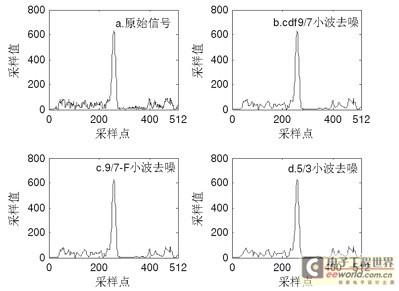 ЭМ1 ЛиВЈаХКХгВуажЕЗЈШЅдыаЇЙћБШНЯ ЪЕбщжаВЩгУОЋЖШЮЊ10ЮЛЕФФЃЪ§зЊЛЛЦїЖд3mmВЈЖЮКСУзВЈЬНВтЦїЛиВЈаХКХНјааВЩбљЃЌНЋВЩбљЪ§ОнЪфШыМЦЫуЛњЃЌРћгУmatlabНјааЗТецЁЃЗжБ№ВЩгУећЪ§ЕФ9/7-FаЁВЈЁЂCDF9/7аЁВЈЁЂ5/3аЁВЈЃЌзі3ВуЗжНтЃЌЛљгкШэуажЕКЏЪ§ЗЈКЭгВуажЕКЏЪ§ЗЈЖдаХКХНјааШЅдыДІРэЃЌШЅдыаЇЙћШчЭМ1ЁЂЭМ2ЫљЪОЁЃПЩМћЖдгкКСУзВЈЬНВтЦїЛиВЈаХКХШЅдыЃЌШ§жжаЁВЈВюБ№МЋаЁЃЌ9/7-FаЁВЈКЭCDF9/7аЁВЈЖдЯИНкБЃСєЩдКУЃЌЖј5/3аЁВЈдђИќЮЊЦНЛЌЁЃ 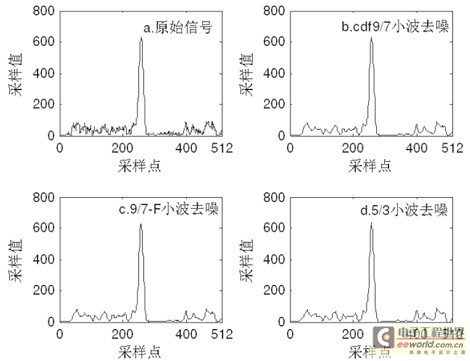 ЭМ2 ЛиВЈаХКХШэуажЕЗЈШЅдыаЇЙћБШНЯ 4 ЫуЗЈИДдгЖШЗжЮіМАгВМўЪЕЯж ЛљгкећЪ§ЕФ9/7-FаЁВЈКЭCDF9/7аЁВЈЕФЫуЗЈИДдгЖШЯрЭЌЃЌЖј5/3аЁВЈЫуЗЈНЯЮЊМђЕЅЃЌЦфЫуЗЈИДдгЖШБШНЯШчБэ2ЫљЪОЁЃЫуЗЈЪЕЯжЪБЃЌCDF9/7аЁВЈЮЊИЁЕудЫЫуЃЌВЛЪЪКЯгВМўЦНЬЈЁЃ9/7-FаЁВЈКЌгаећЪ§ЕФГЫЗЈЁЂМгЗЈКЭвЦЮЛдЫЫуЃЌЖј5/3аЁВЈжЛгаећЪ§ЕФМгЗЈКЭвЦЮЛдЫЫуЃЌНЯ9/7-FаЁВЈИќЮЊМђЕЅЁЃзлКЯПМТЧЫуЗЈЕФИДдгЖШЁЂаХКХШЅдыаЇЙћМАгВМўЦНЬЈЕФдЫЫуФмСІЃЌЪЕМЪ3mmВЈЖЮКСУзВЈЬНВтЦїаХКХДІРэЯЕЭГжабЁгУећЪ§5/3аЁВЈШэуажЕКЏЪ§ЗЈЖдЛиВЈаХКХНјааШЅдыДІРэЁЃ  Бэ2 ИїаЁВЈЫуЗЈИДдгЖШБШНЯ КСУзВЈЬНВтЦїаХКХДІРэЕФЪЕЪБадвЊЧѓЮЊЃКдкВЩбљЪ§ОнЯТДЮИќаТЧАвЊЭъГЩаХКХШЅдыЁЂЬиеїЬсШЁЁЂФПБъЪЖБ№ЕШЙІФмЁЃПМТЧ3ВуаЁВЈБфЛЛЕФ5/3аЁВЈШэуажЕКЏЪ§ЗЈШЅдыЫуЗЈЃЌЩшашДІРэЕФЪ§ОнИіЪ§ЮЊNЃЌЧвNЮЊ2ЕФећЪ§ДЮУнЁЃгЩ5/3аЁВЈЕФЫуЗЈВНжшПЩжЊЃЌЕкi(i=1,2,3)ВуаЁВЈБфЛЛЕФМгЗЈКЭвЦЮЛЫуДЮЪ§ЮЊЃК5N/2i-1КЭ2N/2i-1ЁЃаХКХжиЙЙЪБЕФдЫЫуСПЭЌЗжНтЪБЃЌуажЕКЏЪ§ЖдаЁВЈЯЕЪ§ДІРэЪБАќРЈуажЕЕФШЗЖЈКЭЯЕЪ§ЕФДІРэЁЃШЗЖЈуажЕЪБЪзЯШЖдаЁВЈЯЕЪ§ЕФОјЖджЕХХађ(КЭДѓаЁЫГађЮоЙи)ЃЌЦфдЫЫуСПЮЊЁЦN/2i(N/2i-1)ДЮХаЖЯКЭ3ЁЦN/2i(N/2i-1)ДЮИГжЕ(МДЪ§ОндкДцДЂПеМфЕФЕижЗНЛЛЛ);вђаЁВЈЯЕЪ§ЕФИіЪ§НдЮЊХМЪ§ЃЌжажЕШЁХХађКѓжаМфСНЪ§ЕФЦНОљжЕЃЌЙЪМЦЫужажЕЪБЕФЖрСЫ3ДЮМгЗЈКЭ3ДЮвЦЮЛ;РћгУЧАЪіуажЕМЦЫуЙЋЪНМЦЫууажЕЕФдЫЫуСПЮЊ3ДЮГЫЗЈКЭ3ДЮвЦЮЛ;аЁВЈЯЕЪ§ДІРэЕФдЫЫуСПзюДѓЮЊN/2iДЮХаЖЯКЭN/2iДЮМгЗЈЁЃФЧУДаХКХШЅдыЫуЗЈЕФзмдЫЫуСПЮЊ2ЁЦ(5N/2i-1)+ЁЦN/2i+3ДЮМгЗЈЁЂ2ЁЦ(2N/2i-1)+3ДЮвЦЮЛЁЂ3ДЮГЫЗЈЁЂ3ЁЦN/2i(N/2i-1)ДЮИГжЕЁЂЁЦN/2i(N/2i-1)+ЁЦN/2iДЮХаЖЯЁЃ ЪЕМЪаХКХДІРэЯЕЭГжаЃЌаХКХВЩбљМфИєЮЊ100ІЬsЃЌДІРэЦїУПДЮДІРэ64ИіВЩбљЕуЃЌВЩгУЪ§ОнСїЗНЪНЃЌУПДЮДІРэИќаТвЛИіЕуЁЃЭЈгУЖЈЕуDSPПЩвддкЕЅжИСюжмЦкЭъГЩМгЗЈЁЂвЦЮЛЁЂГЫЗЈЁЂГЫМгЁЂХаЖЯМАИГжЕдЫЫуЁЃЫуЗЈЫљашзмЕФДІРэЦїжИСюжмЦкЪ§ЪЧЩЯЪідЫЫуДЮЪ§ЕФзмКЭЃЌМД6841ИіжИСюжмЦкЁЃФЧУДЯЕЭГвЊЧѓДІРэЦїЕФдЫЫуЫйЖШзюЕЭЮЊ6841/1e-4=68.41MIPSЁЃШєПМТЧЦфЫќПижЦжИСюЕФжДааЁЂаХКХЕФЬиеїЬсШЁЁЂФПБъЪЖБ№МАВЩгУCгябдБрГЬЪББрвыЦїЕФБрвыаЇТЪЃЌдђЖдДІРэЦїЕФдЫЫуЫйЖШвЊЧѓИќИпЃЌОЪЕбщЃЌЯЕЭГвЊЧѓДІРэЦїзюЕЭдЫЫуЫйЖШЮЊ160MIPSЁЃ УРЙњTIЙЋЫОЕФTMS320VC5509AаЭ32ЮЛЖЈЕуDSPОпгадЫЫуЫйЖШПьЁЂОЋЖШИпЁЂБрГЬСщЛюЁЂЙІКФЕЭЁЂЭтЩшзЪдДЗсИЛЁЂМЏГЩЖШИпЁЂЬхЛ§аЁЁЂЭтЮЇЕчТЗМђЕЅЕШЬиЕуЃЌЦфзюИпдЫЫуЫйЖШЮЊ200MIPSЃЌПЩвдТњзу3mmВЈЖЮКСУзВЈЬНВтЦїЕФаХКХДІРэЯЕЭГЪЕЪБадМАаЁаЭЛЏЕФвЊЧѓЁЃБОЩшМЦбЁгУДЫПюDSPЙЙНЈСЫ3mmВЈЖЮКСУзВЈЬНВтЦїаХКХДІРэЕФгВМўЦНЬЈЃЌЯЕЭГПђЭМШчЭМ3ЫљЪОЁЃ 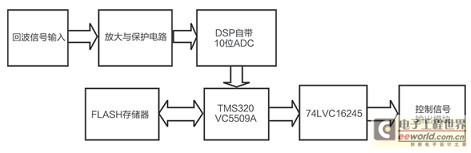 ЭМ3 аХКХДІРэЯЕЭГПђЭМ 5 Нсгя ЭЈЙ§БШНЯ9/7-FаЁВЈЁЂCDF9/7аЁВЈЁЂ5/3аЁВЈдк3mmВЈЖЮКСУзВЈЬНВтЦїЛиВЈаХКХШЅдыжаЕФаЇЙћМАЫуЗЈИДдгЖШЃЌбЁгУдЫЫужЛЩцМАећЪ§МгЗЈКЭвЦЮЛЕФећЪ§5/3аЁВЈЃЌОпЬхЗжЮіСЫЫуЗЈЪЕЯжЪБЖдгВМўЦНЬЈДІРэЫйЖШЕФвЊЧѓЃЌбЁгУTMS320VC5509AаЭDSPЙЙНЈСЫЬНВтЦїаХКХДІРэЯЕЭГЕФгВМўЦНЬЈЃЌВЂГЩЙІЪЕЯжСЫЛиВЈаХКХЪЕЪБШЅдыЁЃОЖрДЮЪЕбщЃЌДЫГЩЙћвбгІгУгкЪЕМЪЙЄГЬВњЦЗжаЁЃ |
ЭјгбЦРТл