
基于ARM的等精度测频在机组转速测控中的应用
发布时间:2011-1-21 20:20
发布者:techshare
|
电力系统的频率反映了发电机组发出的有功功率与负荷所需有功功率的平衡情况。高精度和高可靠性的频率测量对整个电力系统的稳定运行有着至关重要的作用,机组在开停机过程中,频率变化范围比较大,变化速度比较快,传统的测频方法由于固有的缺陷,难以很好解决这一问题。等精度测量方法的测量精度不随被测脉冲的频率高低变化而改变,只与标准计数器有关,可以使测量精度大大提高,并且闸门时间可变,可快速反应频率的变化。 1 传统测量方法的原理及误差分析 传统测量方法有2种,一种是测频法(M 法),是对被测信号在闸门时间(T—Nfo,N 个基准信号脉冲的时间)内的脉冲进行计数(计数值为M),被测信号的频率为  ,误差为   另一种是测周法(T法),是在被测信号一个周期内对基准脉冲计数(计数值为N),被测信号的频率为  , 误差为  。 其中,  为基准信号频率准确度,通常可达  ;对于测频法,在相同的闸门时间内,对于任意的f不能保证在T时间内正好有M 个T ,因此会产生最大±1个T 的量化误差,并且随着被测频率f 减小,M 减小,误差越大,因此,测频法只对高频信号有较好的测量精度;对于测周法,随着被测频率.f 增大,N 越小,误差越大,因此测周法只对低频信号有较好的测量精度。在测量范围比较宽时,采用上述2种方法相结合的方式,无疑对提高测量精度是有效的,但又存在着如下问题:一是整个频段测量精度不一致;二是中界频率附近频繁切换测量方法,误差大,实时性差。 2 等精度测量方法的原理及误差分析 等精度测频法是在传统测频方法基础上发展起来的测频方法,并且在各个领域的测频中得到了越来越多的应用。 等精度测频法原理如图1所示。 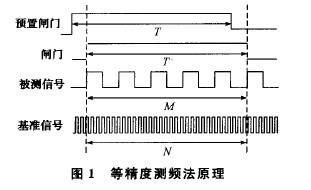 设置2个计数器,计数器1对被测信号进行计数,计数器2对基准信号进行计数。预先设置一个闸门时间T,测量开始后,当被测信号的下一个前沿到来时,同步打开计数器1和计数器2开始计数,闸门时间到达后,计数器I和计数器2都不停止计数,直到被测信号的前沿到来时,同步关闭计数器1和计数器2。被测信号的频率可表示为:  误差为: ,其中M为计数器l计数值,N 为计数器2计数值,f为基准频率,可以看出,它与传统测频法的表达式相同,不同的是,计数器1的工作是由被测脉冲同步开启和关闭,因此不存在计数误差,即99 ,由此可见,这种方法的测量精度不随被测信号的频率变化而变化,在全量程范围内测量值显示的有效位数相同,即等精度测量。一般情况下,1010 ,所以这种方法的测量误差主要是对基准信号的计数存在±1误差引起的。因此可以看出,基准信号频率越高,在相同的闸门时间的情况下,测量精度越高。另外,闸门时间T越长,计数N 越多,测量精度越高。然而,T和N 受多种因素制约,不可能任意增加,首先是工程的要求,要反映和了解转速的变化程度,必须采用较短的时间。水轮机组转速在开停过程中从0~5O Hz变化,不超过100 Hz,在实际应用中,可适当选择闸门时间和基准信号频率,可使测量能够在全频段实现高精度的快速测量。 3 在ARM 测量系统中的实现方案 应用等精度测量方法,机组转速测控系统采用ARM7的LPC2214为CPU,LPC2214具有2个32位的定时器/计数器,每个定时器/计数器具有如下特性E : 1)带可编程32位预分频器的32位定时器/计数器。 2)每个定时器的4个32位捕获通道可在输入信号跳变时捕获定时器的瞬时值。捕获事件可选择产生中断。 3)4个32位匹配寄存器:① 连续操作,可选择在匹配时产生中断;② 匹配时停止定时器,可选择产生中断;③ 匹配时复位定时器,可选择产生中断。 4)每个定时器有4个对应于匹配寄存器的外部输出,具有下列特性:① 匹配时置低电平;② 匹配时置高电平;③ 匹配时翻转;④ 匹配时不变。 本系统中采用了定时器/计数器0的匹配功能,用来控制闸门时间,定时器/计数器1的捕获功能,用来监测被测信号。被测信号通过硬件整形电路变成与其频率一致的方波信号,接入定时器/计数器1的捕获管脚,开放其捕获中断功能,软件响应中断并进行相应的处理。计数频率为2.211 840 MHz,闸门时间为0.5 s,误差为1111 ,其中,1212 ,所以可以得出,理论上,等精度测频在本系统中的测量精度优于 ,完全可以满足工程需要。 在水轮机转速测控系统中,为提高测量的可靠性,采用电气(机端残压)信号和齿盘机械脉冲信号2种信号类型同时输入的测量方式,计算得到的频率值用于显示,开出控制等。测量系统电路结构框图如图2所示。 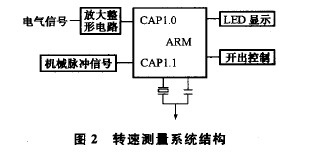 系统程序主要包括初始化定时器/计数器,捕获中断处理,频率计算,显示,开出控制等子程序,系统流程如图3所示。 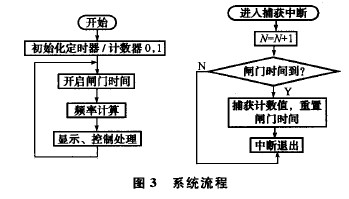 使用RIGOL函数/任意波形发生器,产生频率变化的正弦波形:① 500 S内模拟波形频率从100 Hz下降到0.2 Hz,下降梯度为0.199 6 Hz/s; ②模拟波形频率从100 Hz下降至1 Hz再从1 Hz上升至100 Hz,每10 Hz持续18 S;③每0.5 s记录一次测量数据,分别得到如图4所示波形1和波形2。 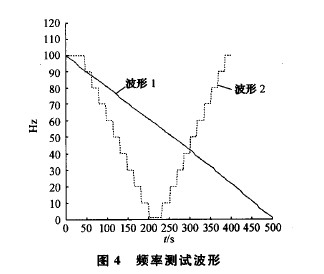 实验证明,利用等精度测频方式频率,可以在整个测量范围内取得比较高的测量精度,本测试系统的最大相对误差小于1O~。闸门时间为0.5 S,可快速反应机组转速的变化。 4 结语 等精度测量方法与传统测量的测频法和测周法相比,能够实现全频段内等精度,大大提高了测量精度。试验结果表明,在水轮机转速测控系统中应用等精度测量方法,测量的最大相对误差优于 ,闸门时间可变,能够快速反应机组转速的变化。开发的SJ一22D微机转速测控装置已在多个水电站(厂)投入应用,运行准确可靠。 |

网友评论