
өҘЖ¬»ъ¶ФТЗұнІҪҪшөз»ъөДПё·ЦҝШЦЖ
·ўІјКұјдЈә2009-10-20 11:09
·ўІјХЯЈәАоҝн
|
ЧчХЯЈә КұјдЈә2009-10-13 АҙФҙ:СЦКА¶° ЦРҝЖФәОдәәОпАнУлКэС§СРҫҝЛщ ЎЎЎЎТЗұнІҪҪшөз»ъ ЎЎЎЎІҪҪшөз»ъКЗҪ«өзВціеРЕәЕЧӘұдОӘҪЗО»ТЖ»тПЯО»ТЖөДҝӘ»·ҝШЦЖФӘјюЎЈФЪ·Зі¬ФШөДЗйҝцПВЈ¬өз»ъЧӘЛЩЎўНЈЦ№өДО»ЦГЦ»ИЎҫцУЪВціеРЕәЕөДЖөВКәНВціеКэЈ¬¶шІ»КЬёәФШұд»ҜөДУ°ПмЈ¬јҙёшөз»ъДіПаПЯИҰјУТ»ВціеРЕәЕЈ¬өз»ъФтЧӘ№эТ»ёцІҪҫаҪЗЎЈХвТ»ПЯРФ№ШПөөДҙжФЪЈ¬јУЙПІҪҪшөз»ъЦ»УРЦЬЖЪРФөДОуІо¶шОЮАЫ»эОуІоөИМШөгЈ¬К№өГФЪЛЩ¶ИЎўО»ЦГөИҝШЦЖБмУтУГІҪҪшөз»ъАҙҝШЦЖұдөГ·ЗіЈјтөҘЎЈЛдИ»ІҪҪшөз»ъТСұ»№г·әөШУҰУГЈ¬ө«ІҪҪшөз»ъІўІ»ПсЖХНЁөДЦұБчөз»ъЎўҪ»Бчөз»ъДЗСщФЪіЈ№жПВК№УГЎЈЛьұШРлФЪЛ«»·РОВціеРЕәЕЎў№ҰВКЗэ¶ҜөзВ·өИЧйіЙҝШЦЖПөНіПВК№УГЎЈ ЎЎЎЎТЗұнІҪҪшөз»ъКфУЪІҪҪшөз»ъЦРМе»эЎў№ҰәДҪПРЎөДАаұрЈ¬ҝЙТФУЙөҘЖ¬»ъ»тЧЁУГРҫЖ¬өДТэҪЕЦұҪУЗэ¶ҜЈ¬І»РиНвҪУЗэ¶ҜЖчЈ¬Тт¶шФЪТЗұнЦРұ»УГУЪЦёХлөДРэЧӘҝШЦЖЎЈ ЎЎЎЎРиЗу·ЦОц ЎЎЎЎұҫ·Ҫ°ёЦРК№УГөДТЗұнҫЯУРИзПВМШөгәНЙијЖІОКэЈә ЎЎЎЎЎсЦёХлПмУҰБйГфЎўЧЯО»ЧјИ·Ј¬јҙКХөҪЗэ¶ҜВціеәуІ»ДЬ¶ӘІҪ; ЎЎЎЎЎсЦёХлЧӘ¶ҜЖҪОИЈ¬јҙЦёХлҙУөұЗ°О»ЦГөҪДҝұкО»ЦГЦ®јдөДЧЯО»ТӘЖҪОИЈ¬ХэЎў·ҙЧӘ¶јІ»ДЬіцПЦ¶¶¶Ҝ; ЎЎЎЎЎсБҪПаЎўІҪҫаҪЗ10oЎўЧӘ¶Ҝ·¶О§300oЎЈ ЎЎЎЎёщҫЭјјКхІОКэҝЙЦӘЈ¬ІЙУГБҪПаЛДЕДәНБҪПа°ЛЕДКұөДІҪҫаҪЗОӘ10oәН5oЈ¬ФЪ300oөД·¶О§ДЪЦ»ДЬЧч30әН60ёцҝМ¶И»®·ЦЈ¬ФЪКөјКУҰУГЦРЈ¬»б·ўПЦЦёХлІҪҫаҪЗІ»ДЬВъЧгТӘЗу¶шЗТ¶¶¶ҜІ»ҝЙұЬГвЎЈОӘБЛКөПЦЦёХлёЯҫ«¶ИөДЧјИ·ЧЯО»әНЖҪОИФЛЧӘЈ¬ТӘ¶ФІҪҪшөз»ъІҪҫаҪшРРёЯ·ЦұжВКПё·ЦЈ¬ХвТІКЗЙијЖөДДСөгЛщФЪЎЈ ЎЎЎЎІҪҪшөз»ъөДПё·ЦјјКхКЗТ»ЦЦөзЧУЧиДбјјКхЈ¬ЖдЦчТӘДҝөДКЗМбёЯөз»ъөДФЛЧӘҫ«¶ИЈ¬КөПЦІҪҪшөз»ъІҪҫаҪЗөДёЯҫ«¶ИПё·ЦЎЈЖд»щұҫёЕДоОӘЈәІҪҪшөз»ъНЁ№эПё·ЦЗэ¶ҜЖчөДЗэ¶ҜЈ¬ЖдІҪҫаҪЗұдРЎБЛЎЈИзЗэ¶ҜЖч№ӨЧчФЪ10Пё·ЦЧҙМ¬КұЈ¬ЖдІҪҫаҪЗЦ»ОӘөз»ъ№МУРІҪҫаҪЗөДК®·ЦЦ®Т»ЎЈТФБҪПаЛДЕДОӘАэЈәөұөз»ъ№ӨЧчФЪІ»Пё·ЦөДХыІҪЧҙМ¬КұЈ¬ҝШЦЖПөНіГҝ·ўТ»ёцІҪҪшВціеЈ¬өз»ъЧӘ¶Ҝ10o;¶шУГПё·ЦЗэ¶ҜЖч№ӨЧчФЪ10Пё·ЦЧҙМ¬КұЈ¬өз»ъЦ»ЧӘ¶ҜБЛ1oЎЈПё·Ц№ҰДЬНкИ«КЗУЙЗэ¶ҜЖч»төҘЖ¬»ъҝҝҫ«И·ҝШЦЖөз»ъөДПаөзБчЛщКөПЦөДЈ¬Улөз»ъұҫЙнОЮ№ШЎЈ ЎЎЎЎПё·ЦФӯАн ЎЎЎЎБҪПаЛДЕДAЎўBЎў/AЎў/BөДЗэ¶ҜЧҙМ¬ұнИзұн1ЛщКҫЎЈ 
ЎЎЎЎБҪПа°ЛЕДAЎўBЎў/AЎў/BөДЗэ¶ҜЧҙМ¬ұнИзұн2ЛщКҫЎЈ ЎЎЎЎҙУТФЙПөД·ЦОцҝЙЦӘЈ¬БҪПаЛДЕДКЗХыІҪФЛЧӘІ»Пё·ЦЈ¬БҪПа°ЛЕДЖдКөКЗ2Пё·ЦЎЈәПіЙөДҙЕіЎәНөзБчКёБҝјРҪЗТФ90oәН45oөД·ҪКҪұд»ҜЈ¬ИзҙЛНщёҙСӯ»·ЎЈ ЎЎЎЎІОҝјПа№ШЧКБПәуІ»ДС·ўПЦЈәПё·ЦЗэ¶ҜјјКхіЈУГҪьЛЖХэПТІЁөДҪЧМЭРНөзБчҙъМжҫШРОІЁөзБчЈ¬ІъЙъТ»ёцОўІҪРэЧӘҙЕіЎЈ¬ҙУ¶шҙш¶Ҝөз»ъТФёьРЎөДІҪҫаҪЗЧӘ¶ҜЈ¬ЖдөзБчІЁРОәНРэЧӘҙЕіЎКёБҝИзНј1ЛщКҫЎЈН¬КұУЙУЪХэПТІЁөзБчұд»ҜЖҪ»¬Ј¬К№өз»ъФЛРРёьЖҪОИЎўФлЙщёьРЎЎЈјҙНЁ№эёДұдПаБЪБҪПа(AЈ¬B)өзБчөДҙуРЎәН·ҪПт(AПаХэПТІЁәНBПаУаПТІЁКёБҝөюјУ)Ј¬ТФёДұдәПіЙҙЕіЎөДјРҪЗЈ¬НЁ№эөзБчКёБҝәПіЙөД·ҪКҪАҙҝШЦЖІҪҪшөз»ъФЛЧӘЎЈ 
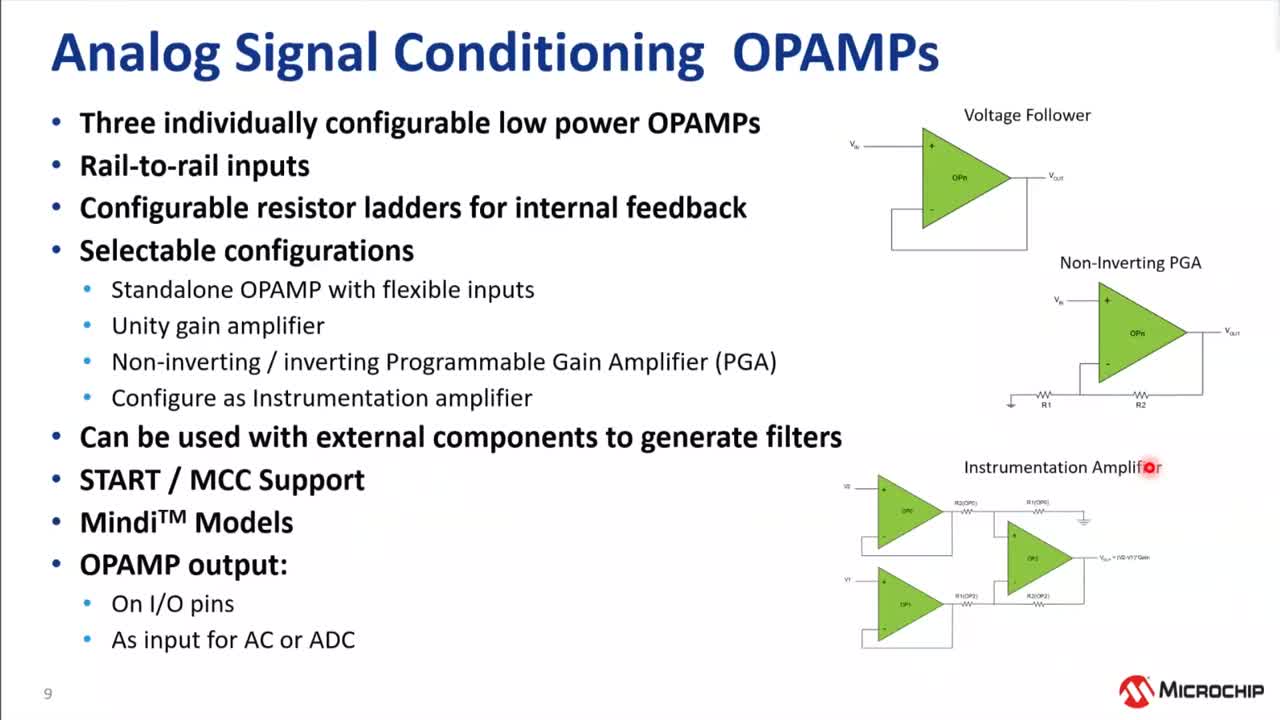
ЎЎЎЎУІјюЙијЖәНИнјюұаіМ ЎЎЎЎёщҫЭПё·ЦФӯАнҝЙЦӘЈ¬¶ФУЪБҪПаІҪҪшөз»ъЈ¬РиТӘН¬КұҝШЦЖБҪЧйПЯИҰөДөзС№ҙуРЎәН·ҪПтІЕДЬҙпөҪәПіЙөзБчКёБҝҝШЦЖөДДҝөДЈ¬ҝШЦЖПЯИҰөДөзБчҙуРЎУРБҪЦЦ·Ҫ°ёЈәЖдТ»КЗНЁ№эөҘЖ¬»ъРҙИлКэЧЦБҝЈ¬УЙКэДЈЧӘ»»ЖчјюКдіцДЈДвөзС№Ј¬ҝШЦЖПЯИҰөзБчҙуРЎ;Жд¶юКЗНЁ№эДіР©өҘЖ¬»ъЧФҙшөДPWMТэҪЕКдіцХјҝХұИҝЙҝШөД·ҪІЁЈ¬УГЖдҪ»БчУРР§ЦөҝШЦЖПЯИҰөзБчҙуРЎЎЈәЬПФИ»Ј¬°ҙХХХэПТ№жВЙұд»ҜөДХјҝХұИҫц¶ЁБЛПЯИҰөзБчҙуРЎТІ°ҙХХПаН¬өДХэПТ№жВЙұд»ҜЎЈПЯИҰөДөзС№К©јУ·ҪПтҝЙТФНЁ№эВЯјӯГЕөзВ·АҙКөПЦЎЈ ЎЎЎЎЧЫЙПЈ¬СЎУГҫЯУРБҪВ·16О»ҫ«¶ИPWM№ҰДЬөДATMEGA48өҘЖ¬»ъЈ¬НвО§УІјюөзВ·ЙијЖИзНј2ЎЈ 
ЎЎЎЎК№УГёГөҘЖ¬»ъҫЯУРPWM№ҰДЬөДPB1әНPB2Б¬ҪУPWM_AәНPWM_BЈ¬К№УГБҪёцЖХНЁТэҪЕБ¬ҪУDIR_AәНDIR_BјҙҝЙКөПЦ¶Фөз»ъөДҝШЦЖЎЈФӯАнЛөГчИзПВЈәөз»ъөДAЎў /AЎўBЎў/B·Цұр¶ФУҰЛДКдИлУлГЕөзВ·өД3Ўў6Ўў8Ўў11ТэҪЕЎЈФЪDIR_AәНDIR_BОӘөНөзЖҪКұЈ¬ГЕөзВ·өД1Ўў9ТэҪЕОӘ0ЧҙМ¬Ј¬Иэј«№ЬQ3ЎўQ4ҪШЦ№Ј¬ГЕөзВ·өД4Ўў12ТэҪЕУЙУЪЙПАӯҙҰУЪ1ЧҙМ¬Ј¬ХвСщЈ¬УлГЕөзВ·өД3Ўў8КдіцОӘ0Ј¬јҙAЎўBОӘ0;ҙЛКұУлГЕөзВ·өД6Ўў11КдіцУлPWM_AәНPWM_BұЈіЦТ»ЦВЈ¬јҙ/AЎў/BУЙPWM_AәНPWM_Bҫц¶ЁЎЈФЪЖдЛыЧҙМ¬ПВЈ¬ТІҫЯУРН¬АаМШөгЈәAәН/AЦ®јдЎўBәН/BЦ®јдөДНЁөзј«РФУЙDIR_AәНDIR_Bҫц¶Ё;AәН/AЦ®јдЎўBәН/BЦ®јдөДөзБчҙуРЎУЙPWM_AәНPWM_BөДХјҝХұИҫц¶ЁЎЈ¶шЗТЦ»ТӘИэј«№ЬQ3ЎўQ4№ӨЧчХэіЈЈ¬УлГЕөзВ·ҫНІ»»біцПЦВЯјӯ»мВТөДЗйҝцЎЈ ЎЎЎЎЕдәПУІјюөДЙијЖЈ¬ИнјюЙПұаРҙБЛТ»ёцУЙ64ёцКэҫЭЧйіЙөДКэЧйЈ¬·Цұр¶ФУҰБЛ0~90oХэПТІЁ·щ¶Иұд»ҜөД8О»КэЧЦБҝ»ҜЦө(ТФҪЧМЭІЁөД·ҪКҪДЈДвБЛ64өгХэПТІЁійСщ)Ј¬ГҝёцЦөУГАҙҝШЦЖКдіцІЁРОХјҝХұИЈ¬КөјКЙПІОУлБЛөзБчКёБҝјРҪЗЧӘ¶Ҝ90o№эіМЦРЖдөзБчҙуРЎөДјЖЛгЎЈЦЪЛщЦЬЦӘЈ¬ХэПТЎўУаПТІЁПаО»ПаІо90oЈ¬ФЪТСЦӘ0~90oХэПТІЁ·щ¶Иұд»ҜұнәуЈ¬Н¬СщҝЙТФөГіц90o~180oЎў180o~270oЎў270o~360o(0o)өДХэПТІЁЎўУаПТІЁ·щ¶Иұд»ҜұнЈ¬ЛщТФНЁ№э 0~90oХэПТІЁ·щ¶Иұд»ҜөД8О»КэЧЦБҝ»ҜұнөДСЭ»ҜЈ¬ҫНҝЙТФФЪБҪПа°ЛЕД(¶юПё·Ц)өД»щҙЎЙП°СөзБчКёБҝјРҪЗ·ЦіЙЛДёцПуПЮЈ¬ЕдәПј«РФөДҝШЦЖЈ¬ФЪГҝёцПуПЮЦР°СA»т/AөДХэПТІЁәНB»т/BөДУаПТІЁЧч8ЦЦЧйәПЈ¬ФЪГҝЦЦЧйәПЦРНкіЙөзБчҙуРЎөДұд»ҜЈ¬ЧоЦХЧчөҪБҪПа64ЕД(16Пё·Ц) өДҝШЦЖЎЈ¶шЗТЈ¬ЧоЗЙГоөДТ»өгҫНФЪУЪЈәНЁ№эСЎФс64ёцКэҫЭ¶ФУҰГҝ90o·¶О§өДХэПТІЁөД64ёцөгЈ¬ҫНҝЙТФУГТ»ёцЧЦҪЪөДҙуРЎАҙЧчОӘЗш·Ц4ёцПуПЮөДұкЦҫЈ¬ұгУЪ¶ФХэЎўУаПТөДҪЗ¶ИҪшРРСЭ»ҜЈ¬јҙ0~63¶ФУҰ0~90oЈ¬64~127¶ФУҰ90o~180oЈ¬128~191¶ФУҰ180o~270oЈ¬192~255¶ФУҰ 270o~360oЎЈ ЎЎЎЎБҪПа64ЕДAЎўBЎў/AЎў/BөДЗэ¶ҜЧҙМ¬ұнИзұн3(ТФBОӘЖрКјЧҙМ¬)ЎЈ 
ЎЎЎЎУЙУЪТЗұнЦёХлҙУөұЗ°ҪЗЦёПтДҝұкҪЗКұЈ¬ұд»ҜБҝ»бУРІ»Н¬ЎЈОӘұЈЦӨЦёХлПмУҰБйГфЎўОЮ¶¶¶ҜЈ¬ұШРлФЪХэЎў·ҙЧӘКұҝјВЗјУЎўјхЛЩҝШЦЖЎЈіМРтЦРЈ¬ҝЙТФёщҫЭұд»ҜБҝөДҙуРЎәНХэёәЙи¶ЁјёёцҝШЦЖЗшјдЈ¬·ЦұрРҙИлІ»Н¬өДСУКұІОКэЈ¬ёщҫЭҙЛСУКұІОКэАҙҝШЦЖөзБчҙуРЎЎў·ҪПт(ёДұдPWM_AәНPWM_BЎўDIR_AәНDIR_B)ұд»ҜКұјдЈ¬ҫНҙпөҪБЛјУЎўјхЛЩөДҝШЦЖөДДҝөДЎЈ ЎЎЎЎҪбУп ЎЎЎЎНЁ№эЛ«PWM·ҪКҪҝШЦЖБҪПаІҪҪшөз»ъЈ¬јИҙпөҪБЛёЯҫ«¶ИПё·ЦөДДҝөДЈ¬УЦФЪУІјюіЙұҫЙПөГөҪБЛУЕ»ҜЎЈФЪПЦУРөзВ·өДәуј¶ФцјУ№ҰВКЗэ¶ҜөзВ·ІўЧчіМРтөДЙЩБҝРЮёДЈ¬ҫНҝЙТФЧціЙёЯҫ«¶ИЎў¶аПё·ЦІҪҪшөз»ъЗэ¶ҜЖчЎЈ ЎЎЎЎІОҝјОДПЧЈә ЎЎЎЎ[1] Atmel Semiconductor. ATmega48 User`guide ЎЎЎЎ[2] ХФББ, әо№ъИс.өҘЖ¬»ъCУпСФұаіМУлКөАэ[M].ұұҫ©ЈәИЛГсУКөзіц°жЙзЈ¬2004 ЎЎЎЎ[3] Нх»ФМГ, СХЧФУВ, іВОДЬј. »щУЪҙшPWM ДЈҝйөҘЖ¬»ъөДІҪҪшөз»ъПё·ЦЗэ¶ҜҝШЦЖјјКх[J], АнВЫУл·Ҫ·Ё, 2007,26(3) ЎЎЎЎ[4] іВЧУГч.ЖыіөіөЛЩАпіМұнј°ЖдЛЩұИөДјЖЛг·Ҫ·Ё[J].ЖыіөөзЖч, 2005(3):9-11 ЎЎЎЎ[5] БхЗеІЁ,ІМКчХд,ЛпТөЖзөИ. »щУЪөҘЖ¬»ъөДЖыіөАпіМұнЙијЖ[J]. әУұұҙуѧѧұЁ(ЧФИ»ҝЖС§°ж), 2002(9):276-278 |



НшУСЖАВЫ