
PCI9052在多功能CAN适配卡中的应用研究
发布时间:2010-12-8 12:30
发布者:techshare
|
PCI总线是一种独立于CPU的局部总线,实现PCI接口的方案一般有两种:采用可编程逻辑器件和专用总线接口器件。采用可编程逻辑器件实现PCI接口的好处是比较灵活,但其设计难度很高,因为PCI总线对负载要求、传输数据的建立时间的要求都比较苛刻,同时还需要器件内部实现用于配置的各类寄存器,以及完成逻辑校验、地址译码等工作的寄存器。此外,还需加入FIFO、用户寄存器组和后端设备接口等部分。设计这种PCI总线接口会导致将大量的人力、物力投入到复杂的逻辑验证和时序分析的工作上,开发周期较长。采用专用接口器件虽然没有采用可编程逻辑器件那么灵活,但能够有效地降低接口设计的难度,缩短开发时间。专用接口器件具有较低的成本和很高的通用性,能够优化数据传输,提供配置空间,具备用于突发传输功能的片内FIFO,提供扩展局部总线等优点,并且许多公司还提供配套的开发工具,使用很方便,开发周期短。 PCI9052是PLX公司开发的低价格PCI总线从模式接口芯片,低功耗,符合PCI2.1规范,提供的局部总线(Local Bus)可通过编程设置为8/16/32位的(非)复用总线。PCI9052提供的局部总线不但可编程,而且与PCI总线的时钟相互独立运行,可实现异步操作,总线操作自动实现时序同步。两总线的异步运行方便了高、低速设备的兼容。 1 硬件设计 为了充分利用硬件的有用资源,该多功能适配卡不仅要实现与CAN总线进行通信,还具有A/D、D/A及I/O功能,实现对CAN通信和数据采集等功能。PCI9052有5个地址映射空间,要实现这些功能,通过PCI9052来连接是能够满足要求的。I/O采用IO映射空间,CAN、A/D和D/A采用Memory地址映射空间,也可都采用Memory方式,这些地址空间的配置是在EEPROM中进行配置的。根据采样精度要求,A/D芯片采用的是16位单通道并行通信的AD976芯片,转换时间10us,为了实现多通道输入,须在模拟输入端加一多路开关MAX308ESE。D/A芯片采用的是16位8通道芯片DAC7644E,转换时间10us。CAN控制芯片采用PHLIPS的SJA1000,同时须接一CAN驱动芯片82C250。另外,PCI9052需要一片EEPROM芯片用来存储PCI9052的初始化配置参数。可与PCI9052匹配的芯片有Microchip Technology 1K 93AA46、93C46B、93LC46B,还有其他厂商的。在选择EEPROM时一定可参考PCI9052的推荐说明,这里采用的是1K的93LC46B。其原理结构如图1: 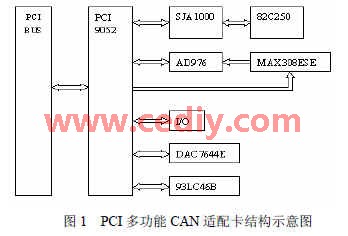 2 软件设计 软件设计包括WDM驱动程序、API接口函数和应用程序设计,这里主要介绍驱动程序设计。对于WDM驱动程序,要获得正确的地址分配值,必须正确地设置配置参数,9052内部的配置寄存器是通过外部串行E2PROM上电加载的。9052会自动根据该E2PROM的状态来决定其内部寄存器的值。如果E2PROM不存在(此时E2PROM和9052连接的数据引脚应加上拉电阻或其内部无有效值,9052会将其内部寄存器配置为缺省值。值得一提的是,如果E2PROM内部没有烧写为有效值时,应保证其开始48位为全“1”;否则,系统上电时可能会产生错误。9052有5个本地空间,用户可根据实际需要进行相应的配置。当将本地空间配置成I/O时,对该空间的读/写操作只能单次进行。配置成存储器空间,用户会有多种接入模式,可大大提高接入速度。 该多功能设配卡驱动程序的开发采用支持Windows2000的WDM驱动程序。开发工具采用Visual C++6.0、Win2000 DDK及DriverStudio2.7。采用DriverStudio向导工具生成驱动程序框架和调试程序,在利用向导时需正确填写PCI Vendor ID和PCI Device ID,否则,在安装驱动程序时查找不到正确的硬件设备,导致无法安装驱动。 由于WDM驱动程序运行在系统的内核态,编写非常复杂,在应用程序和硬件进行数据交换中,可以采用几种方式进行通信:I/O控制方式、直接读写方式、中断方式和DMA方式。由于CAN总线的最高速率是1Mbps,所以我们采用IO控制操作实现数据的传送,在驱动程序派遣例程中实现这些操作,在API函数中提供这些操作的接口,应用程序可使用标准Win32 API函数DeviceIoControl来数据读写,也可以采用DriverStudio向导工具产生的DeviceControl来操作,在这里我们将它集成到对应的API函数里,生成相应的静态库或者动态连接库的形式提供给应用程序。 定义了7个IO控制代码: IOCTL_HIL100_READ_IO_DATA(用于读I/O口数据) IOCTL_HIL100_READ_AD_DATA(用于读AD数据) IOCTL_HIL100_READ_DA_DATA (用于读DA数据) IOCTL_HIL100_READ_CAN_DATA(用于读CAN数据) IOCTL_HIL100_WRITE_IO_DATA(用于写I/O口数据) IOCTL_HIL100_WRITE_DA_DATA(用于写DA数据) IOCTL_HIL100_WRITE_CAN_DATA(用于写CAN数据) 这些控制代码在驱动程序的DeviceControl(KIrp I)函数中调用,如下程序所示: NTSTATUS PCIDriverDevice::DeviceControl(KIrp I) { NTSTATUS status; switch (I.IoctlCode()) { ……………………………………… case IOCTL_HIL100_READ_IO_DATA: status = IOCTL_HIL100_READ_IO_DATA _Handler(I); case IOCTL_HIL100_WRITE_IO_DATA: status = IOCTL_HIL100_WRITE_IO_DATA _Handler(I); case IOCTL_HIL100_WRITE_DA_DATA: status = IOCTL_HIL100_WRITE_DA_DATA _Handler(I); case IOCTL_HIL100_READ_AD_DATA: status = IOCTL_HIL100_READ_AD_DATA _Handler(I); default: status = STATUS_INVALID_PARAMETER; break; } …………………………. } 在该函数进行驱动中相应的数据处理与传递,包括从内存中读上层应用程序发送下来的数据或将AD、CAN等外设传递上来的数据送到上层应用程序。 API函数主要提供了PCI卡的开关,A/D、D/A、I/O的读写函数,CAN的设置、读写,中断事件消息函数等。API函数与以上控制代码相关联,传递数据和控制参数。如下程序所示: bool WriteDataToIO(unsigned char data) //写数据到IO口 { …… ULONG BytesReturned; if (!DeviceIoControl(hHIL100, IOCTL_HIL100_WRITE_IO_DATA, &data, 1, NULL, 0, &BytesReturned, NULL)) …… } bool ReadDataFromIO(unsigned char *data) //从IO口读数据 { …… ULONG BytesReturned; if (!DeviceIoControl(hHIL100, IOCTL_HIL100_READ_IO_DATA, &data, 1, data, 1, &BytesReturned, NULL)) …… } bool WriteDataToDA(unsigned short control,unsigned short freq)//写数据到AD { …… ULONG BytesReturned; unsigned short pData[16]; pData[0]=control; pData=freq[0]; pData=freq; pData=freq; pData=freq; if (!DeviceIoControl(hHIL100, IOCTL_HIL100_WRITE_DA_DATA, pData, 10, NULL, 0, &BytesReturned, NULL)) …… } bool ReadDataFromAD(unsigned short address,unsigned short data) { //从AD读数据 …… ULONG BytesReturned; if (!DeviceIoControl(hHIL100, IOCTL_HIL100_READ_AD_DATA,address,16, &data,16, &BytesReturned, NULL)) …… } bool ReadDataFromDA (unsigned char address,unsigned short *data)//从DA读数据 { …… ULONG BytesReturned; if (!DeviceIoControl(hHIL100, IOCTL_HIL100_READ_DA1_DATA,&address,1, data, 2, &BytesReturned, NULL)) …… } 将这些接口函数生成动态链接库的形式,供上层应用程序调用。 3 结束语 由于PCI总线的高速特性,使其被广泛应用于高速数据采集系统和数据传输通信系统中,有效地解决了实时采集、实时传输和实时存储等问题。而PCI总线控制器专用芯片的出现则缩短了PCI总线硬件设备的开发周期,使得硬件设备的可靠性和稳定性都有了较大的提高。在开发过程中,尤其对于高速采样及实时严格的系统,我们实现了对该系统高效率的操作特性,该研究有效的解决了高速实时采集、实时传输和实时存储等的驱动问题。同时该PCI多功能CAN适配卡既实现了CAN总线通信功能,同时也实现了多路通道的数据采集和相应控制。 本文的创新观点 1) 本文将API函数与控制代码建立起关联 2) 本文将应用程序集成到对应的API函数里 |


网友评论