
一种新型极低速异步电机无速度传感器控制方法
发布时间:2010-12-7 21:56
发布者:designer
|
1 引言 近年来,异步电机的无速度传感器矢量控制成为研究热点。目前,异步电机无速度传感器矢量控制在中高速段已获得良好的控制性能,但在极低速段(<1Hz)却仍未实现良好的控制。这是因为常用的异步电机无速度传感器矢量控制方法需要利用反电势,而反电势在极低速时很小,受采样精度和电机参数变化影响较大,导致控制性能降低,无法实现极低速段的无速度传感器矢量控制。 为了实现极低速段的异步电机无速度传感器控制,研究人员提出了各种控制方法。其中研究较多的是高频信号注入法,利用注入的高频定子电压信号产生的电流响应来估计转子位置-。这些基于高频信号注入的方法都利用了异步电机的非理想特性,如转子凸极、齿槽效应及饱和效应等。但是,这些基于高频信号注入的方法存在一个共同的缺点,即高频响应信号常常与其他高频谐波混合在一起,较难分离。需要采用复杂的信号处理方法获得所需高频响应信号,从而降低了系统响应速度,增加了控制系统的复杂性。此外,由于基于高频信号注入的方法利用了异步电机的非理想特性,因此受电机结构影响较大,缺乏一定的通用性。 为避免上述高频信号注入法所固有的各种问题,本文提出了一种基于低频信号注入的方法。该方法将文献中的高频谐波信号变为低频谐波信号,通过注入低频d轴定子电流信号,利用产生的角度误差估计电机转速。该方法仅利用异步电机的基波模型,不依赖各种非理想特性,所以不受异步电机结构影响,具有普遍的适用性。此外,该方法所需低频响应信号容易分离,消除了高频信号注入法信号分离难的缺点,而且对电机参数具有较强的鲁棒性,无须进行参数估计,使得控制系统结构相对简单。仿真及实验结果证明,本文提出的基于低频信号注入的方法可以很好地实现极低速段异步电机无速度传感器矢量控制。 2 低频信号注入法原理 由异步电机数学模型及运动方程可知,异步电机的电磁转矩可表示为: 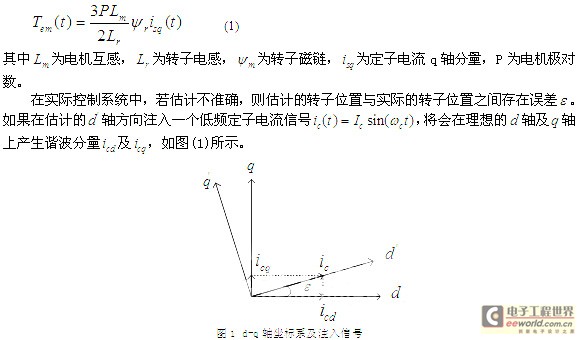 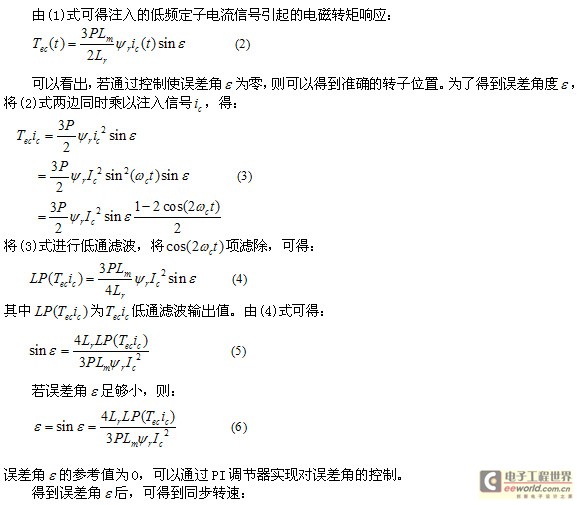 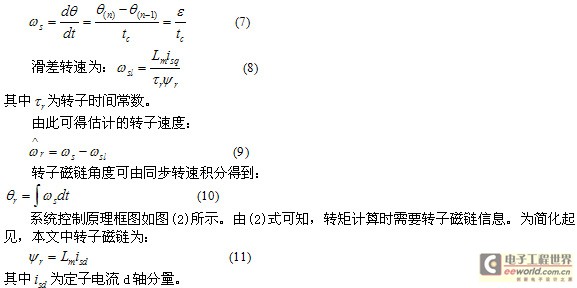 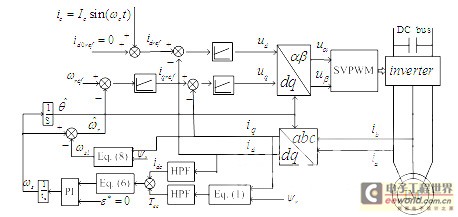 图2低频信号注入法系统控制原理框图 3 电机参数鲁棒性分析 由上述分析可知,本文提出的低频信号注入法仅与注入信号及其引起的转矩响应有关,而与异步电机的定子电阻和转子电阻无关,因此对定转子电阻有很好的鲁棒性。 此外,由于在滑差转速计算中用到了转子时间常数,因此的变化会影响到估计转速的准确性。尽管如此,由于在同步转速估计中并未用到转子时间常数,所以的变化对转子磁链角度的估计没有影响。因此,本文的方法对转子时间常数也具有良好的鲁棒性。 由于对异步电机参数具有较好的鲁棒性,本文提出的方法很好地消除了参数变化对极低速性能的影响。同时,由于无需进行参数估计,控制算法和系统结构都得到大大简化。 4 仿真结果 本文对提出的低频信号注入法进行了仿真,所用的电机参数如表1所示。 根据电机参数,令注入的低频d轴定子电流信号的频率为25Hz,幅值为0.6倍额定d轴定子电流。 表1异步电机参数  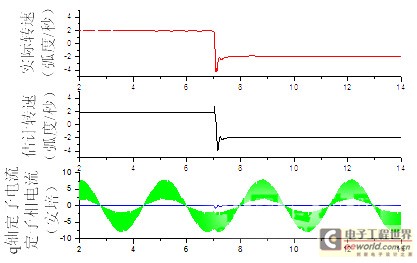 图3空载,参考转速突变0.3Hz->-0.3Hz 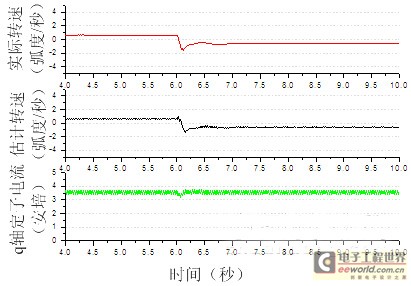 图460%额定负载,参考转速突变0.1Hz->-0.1Hz 图3为异步电机0.3Hz空载运行时突然由正转变为反转的仿真波形。 图4为异步电机0.1Hz带60%额定负载运行时突然由正转变为反转的仿真波形。从图3、图4中可以看出,不管是否带载,转速突变后系统都能够很快恢复稳定,且稳态误差较小。 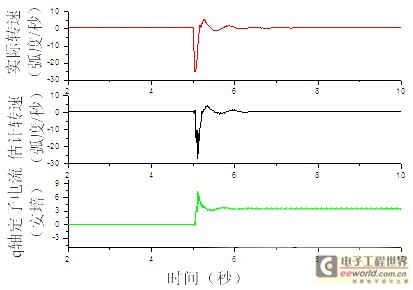 图5参考转速0.1Hz,负载突变0->60%Tn 图5为异步电机0.1hz运行时由空载突变到带60%额定负载的仿真波形。从图中可以看出,负载突变后系统能够很快恢复稳定,且稳态误差较小。 本文还将提出的低频信号注入法与电压模型法相结合,转速低于1Hz时采用低频信号注入法,反之采用电压模型法。图6为带60%额定负载,在两种方法之间切换时的异步电机加减速仿真波形。从图中可以看出该方法具有良好的动态及稳态性能,可实现异步电机的宽范围准确调速。 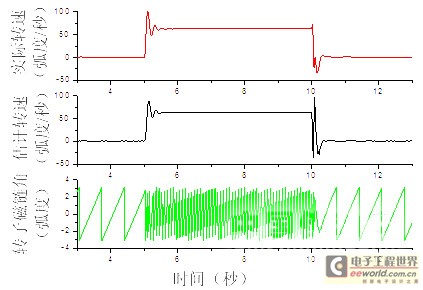 图660%额定负载,参考转速0.1Hz->10Hz->0.1Hz 5 实验结果 本文对提出的低频信号注入法进行了实验验证。实验采用基于DSPTMS320C31的实验平台,所用电机参数及注入信号与仿真中一致。 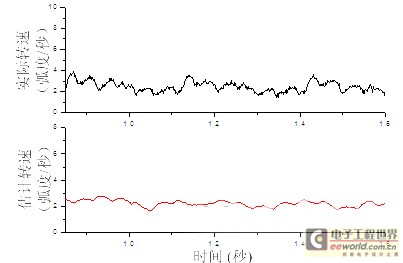 图7空载,参考转速0.3Hz 图7为异步电机0.3hz下空载运行时的稳态波形。从图中可以看出,估计转速和实际转速稳态误差较小,仅有较小脉动。 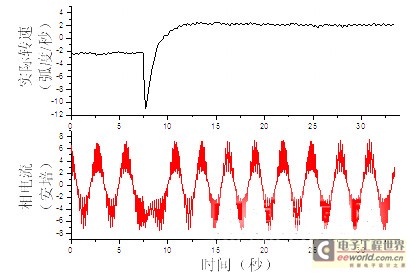 图8空载,参考转速突变-0.3Hz->0.3Hz 图8为异步电机极低速空载运行时突然由反转到正转的实验波形。从图中可以看出,参考转速突变后,实际转速能够较快恢复稳定,且稳态误差较小。 6 结论 本文提出了一种基于低频信号注入法的极低速异步电机无速度传感器矢量控制方法。经过理论分析及仿真和实验验证,本文提出的方法可获得良好的极低速段异步电机控制性能。该方法仅利用异步电机的基波模型,不依赖各种非理想特性,所以不受异步电机结构影响,具有普遍的适用性。此外,该方法所需低频响应信号容易分离,而且对电机参数具有较强的鲁棒性,无须进行复杂的信号分离和参数估计,使得控制算法和系统结构相对简单。 |



网友评论