
基于组态王的远程PID控制系统的开发与实验研究
发布时间:2010-12-7 21:23
发布者:designer
|
1 引言 工业现场中大部分的控制系统的控制器是PID控制器,其PID参数的整定需要一定的控制理论知识和丰富的经验。对于现场缺乏自动化技术人员的企业,其PID参数往往远离最优值。PID参数的优劣直接影响着生产质量。为了改变生产中的这种不利状况,开发一个远程PID参数整定系统,显得非常必要。在实验室中并不具备灵活的可变的控制对象,故本系统的开发选用了NI虚拟仪器LabVIEW软件构建控制对象。在实验室中,以构建一个PID控制器的远程监控系统为例,在LabVIEW上的实验对象进行仿真实验,研究控制效果。 2 远程监控系统简介 系统中PID控制器作为下位机,并通过其自带的串口通信功能连接到上位机,即工控计算机的COM口上。PID控制器的输出接到DAQ采集卡上,把控制信号传入工控计算机中,作用于虚拟仪器LabVIEW中的虚拟对象。经过计算,将虚拟对象的响应,即反馈信号通过DAQ采集卡输出到PID控制器中,如此在实验室中形成简单闭环控制系统。在图1中,具体表现为AI518PID控制器通过串口联接到计算机上,控制器的输出和输入分别通过CompactDAQ进行采集和反馈提供。远程监控实验基于该控制平台进行。 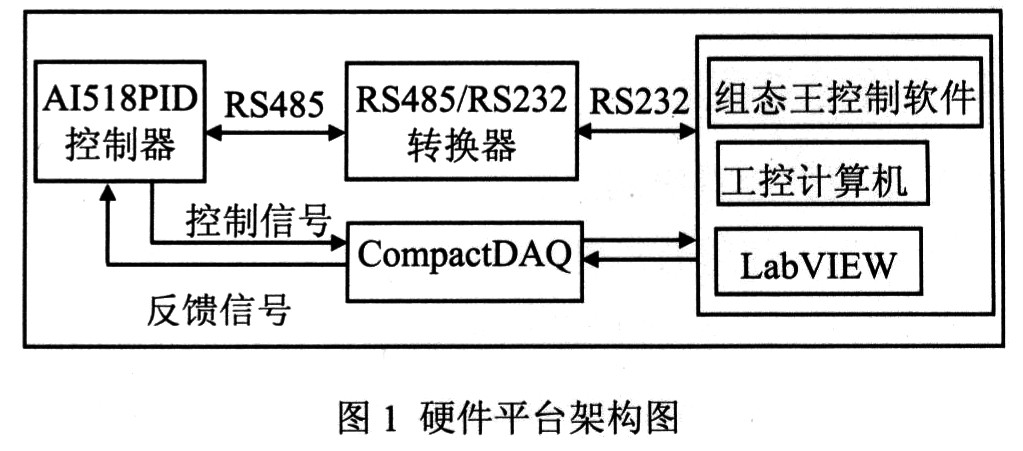 工控计算机连接到互联网,通过TCP/IP协议,由WEB版组态王将控制界面发布到INTERNET上。在客户端可以通过互联网,在浏览器中远程访问组态王控制工程(需下载并安装相关JAVA插件),观测数据变化曲线,并可根据控制状态,实时修改PID参数。本系统同时提供报警功能,及历史控制相关曲线的查询功能,力求远程客户端能够方便,直观地掌握现场相关信息。 3 远程监控系统构成 3.1 硬件平台的搭建 系统采用厦门宇光公司出品的AI518智能温度PID控制器作为下位机,其自带有串口通信功能,为了满足工业现场远距离传输需要,使用RS485传输协议连接,通过RS485/RS232的转接器连接到上位机(工控计算机)。 DAQ采集卡采用NI公司CompactDAQ数据采集卡。PID控制器的输出为4mA~20mA的电流,通过250欧电阻的转换为1V"5V的电压后输入到DAO采集卡的其中一个输入通道口中,而反馈信号从DAQ的一个输出通道口引出,连接到PID控制器的输入口中,形成闭环控制。 硬件平台示意图如图1所示,其中工控计算机中虚线框为连接对应的控制软件。 3.2 软件设计 系统采用组态王6.5l作为组态开发软件。以下简述组态软件开发关键过程。 (1)在组态王中生成A1518系列PID控制器。由于组态王配备对应的驱动,故无须另行开发驱动,只需按照向导便可以在组态王的工程中生成该设备。在组态王中,设备的参数应与控制器内部参数一致。使用软件中的设备测试功能,读取PID控制器的内部寄存器,从而判断组态王软件是否已经与PID控制器正常通信。 (2)在数据词典中设置好各关键变量,开发相关控制画面,并建立设定值、响应值,控制器输出值的动画连接,以生成各种对应的变化曲线。设定值、系统响应值和控制器输出值设为历史记录变量,从而生成历史曲线。 (3)设置基本网络参数。在组态王网络参数设置页中将本机设置成联网,并定义节点名称。在节点类型设置页中,“√”选“本机是IO服务器”,“本机是登录服务器”,“进行历史备份”,保证网络及历史记录功能的正常工作。 (4)网络发布设置。新建实时工程“Remotecontrol"和历史曲线“History”两个发布组。实时工程“Remotecontrol”发布组用于在客户端上对PID参数进行实时控制。画面包括实时设定值、系统响应值和控制器输出值的实时数据及其变化曲线,以及控制器作用于控制对象的PID参数,同时提供设定值和控制器PID参数的实时修改功能。具体画面如图2所示。历史曲线“Histoiy”发布组提供设定值、系统响应值和控制器输出值的历史曲线,通过对大时间跨度的曲线观察有利于控制对象特性的掌握。由于系统中存在两个发布组一分别为实时工程和历史曲线,故在“WEB”选项卡中,“√”选“显示发布组列表”。当从客户端访问时,根据实际需要在发布组列表中选择。 完善其他相关软件开发细节后,该工程便可顺利发布到网络上。需要注意,单机版的组态王加密狗并不支持远程发布功能。 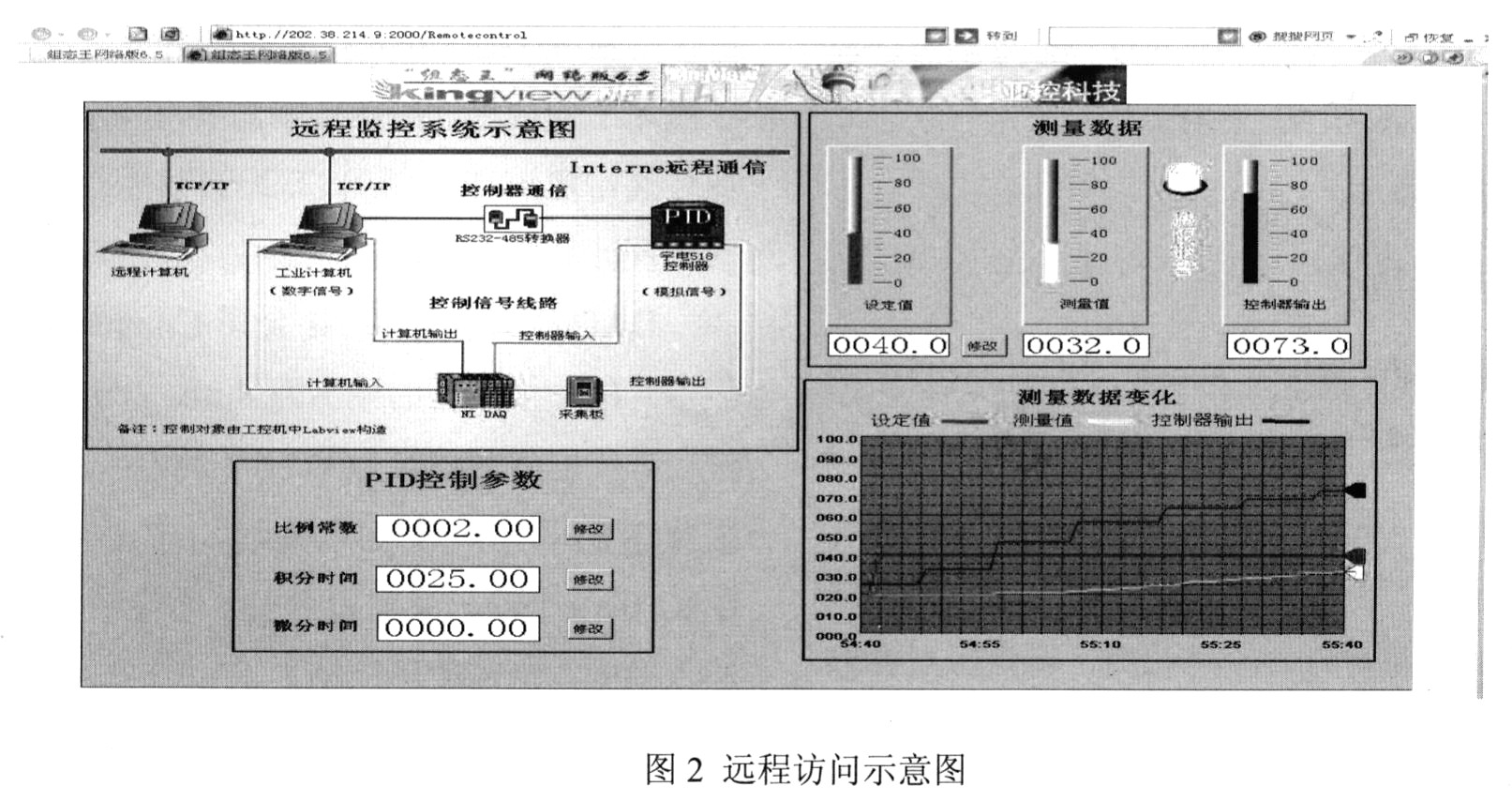 4 远程监控实验 4.1 远程监控系统的登录 组态王使用B/S模式进行远程发布,无须另行安装专用软件,在客户端计算机中安装相关的JRE(JAVA runtime environment)plugging程序,便可在客户端浏览器上远程访问工程并进行调节控制。在客户端计算机的浏览器中,输入以下地址“Http://202.38.214.9:2000/Remotecontrol”访问工程。其中“Http://”不能省略,与其他网址直接输入IP地址即可访问不同。 4.2 远程监控实验 (1)实验对象 在实验室中不具备灵活可变的实物控制对象,故系统设计的时候采用了虚拟仪器软件的仿真对象,选用的具体软件是NI公司的LabVIEW虚拟仪器软件。通过对对象的开环响应曲线的研究,可发现大多数工业过程都能用一阶惯性加纯滞后(First OrderPlusDelay Time)模型来近似描述,简记为FOPDT模型。基于这一点,最小模型假设上业对象模型的传递函数为: 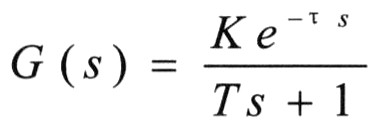 实验时,被控对象的放大倍数K取0.5,T(时间常数)取20s;τ(时滞)=5s。即对象为: 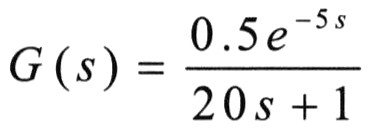 在LabVIEW的仿真程序中和组态王的工程中均可获得实时曲线,但并不能符合具体的实验要求,故本系统提取LabVIEW记录的lvm文件中的数据,使用Matlab软件绘制输出曲线和对象响应曲线。 (2)监控实验 客户端登录远程监控系统后,远程修改PID参数,并完成一个完整的响应过程。结果显示:控制效果良好,整体显示效果良好。 多次观察在客户端进行修改,在服务器上观察反应时间,发现在正常网速下,作用基本同步,证明可以达到远程修改PID参数进行控制的需要。 为了仔细验证该系统的远程参数整定性能,进行了以下有关实验。图3为非周期过程响应曲线。选取三个典型的响应曲线作为实验内容,并提取服务器数据记录,用Matlab将响应曲线绘制出来。 (1)非周期过程响应曲线(见图3) PID参数具体情况如下:P=2;I=25;D=0。 (2)等幅振荡响应曲线(见图4) PID参数具体情况如下:P=1000;I=200;D=O。 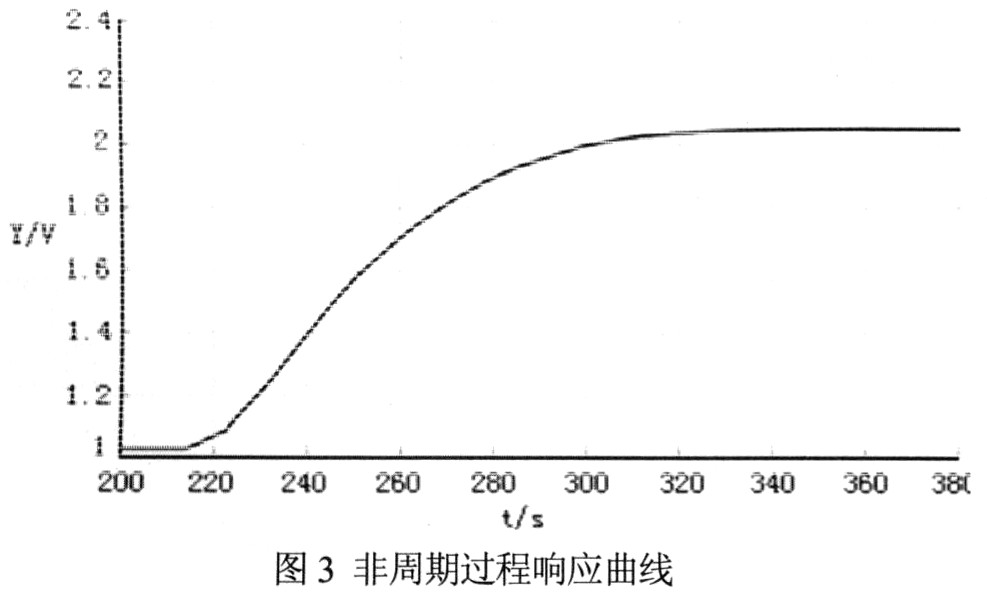 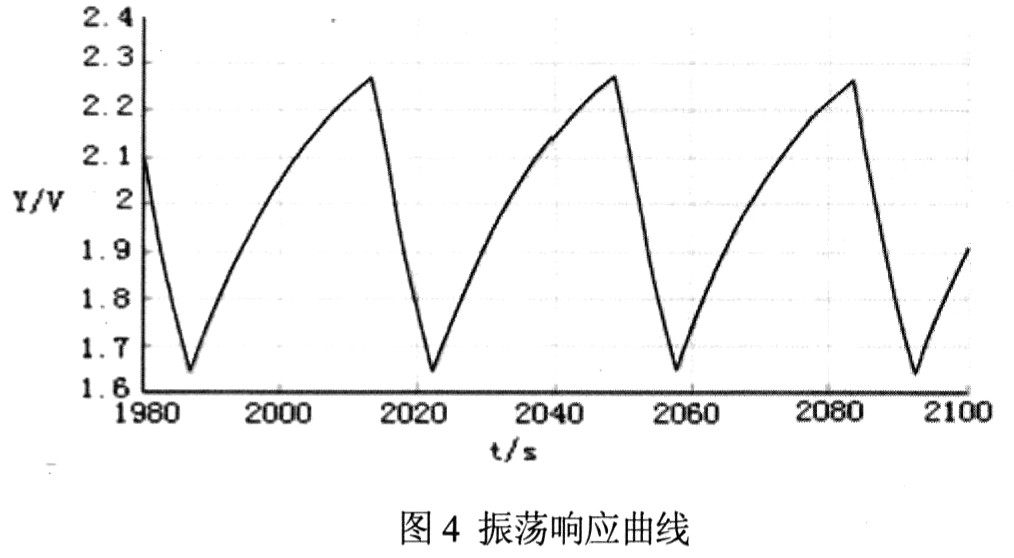 由上述曲线可以看出,远程实时修改PID参数是完全可行的。 5 结语 在工业生产中,各种PID控制器PID参数的整定十分重要,往往需要专业人员对生产过程进行深入了解后才能整定出合理的参数。对于一些缺乏自动化技术人员的企业,其许多PID控制器往往没有运行在最佳状态,从而影响了控制质量。本文通过开发一种远程PID参数整定系统,实现了专业技术人员在异地能方便地访问生产现场的PID控制器,了解控制系统的运行状况,改变PID参数值,使其运行在最佳状态。该远程监控系统使得专业人员资源能够得到最大化的利用,可以减少大量现场整定PID参数的时间,大大提高效率,节省企业成本,是一种值得提倡的PID参数整定模式。 |

网友评论