
»щУЪЖш¶ҜИЛ№ӨјЎИвөДЛ«Чг»ъЖчИЛ№ШҪЪЙијЖ
·ўІјКұјдЈә2010-12-6 12:09
·ўІјХЯЈәtechshare
№ШјьҙКЈә
ИЛ№ӨјЎИв , Л«Чг»ъЖчИЛ
|
Л«Чг»ъЖчИЛПаұИУЪТ»°гөДТЖ¶Ҝ»ъЖчИЛФЪ·ЗҪб№№»Ҝ»·ҫіЦРҫЯУРёьәГөДТЖ¶ҜДЬБҰЈ¬Тт¶шКЬөҪСРҫҝХЯөД№г·ә№ШЧўЎЈҝШЦЖ»ъЖчИЛ»сөГҝмЛЩөДРРЧЯЛЩ¶ИТФј°КөПЦЕЬ¶ҜІҪМ¬ИФИ»КЗЛ«Чг»ъЖчИЛБмУтЦРҫЯУРМфХҪРФөДОКМвЦ®Т»ЎЈ»ъЖчИЛҝмЛЩРРЧЯ»тЕЬ¶ҜКұЈ¬°Ъ¶ҜҪЕФЪВдөШөДЛІјд»бІъЙъТ»ёцҪПҙуөДіе»чБҰЈ¬ҙЛБҰК№ВдөШҪЕ·ҙөҜ»тК№БгБҰҫШөг(zeromoment point)ІъЙъҪПҙуМшұдЈ¬ҙУ¶шФміЙ»ъЖчИЛОИ¶ЁФЈ¶ИҪөөНәНөшө№ЎЈХвЦЦПЦПуұ»іЖОӘіе»чР§УҰЈ¬ЛьКЗЦЖФјЛ«Чг»ъЖчИЛМбёЯІҪРРЛЩ¶ИәНЕЬІҪөДТтЛШЎЈ Жш¶ҜИЛ№ӨјЎИвКЗҪьДкАҙ·ўХ№ЖрАҙөДТ»ЦЦРВРНөДЗэ¶ҜЖчЈ¬McKibbenРНЖш¶ҜјЎИвКЗЖдЦРУҰУГЧоОӘ№г·әөДТ»ЦЦЎЈЛьҫЯУРИбЛіЎў№ҰВК/ЦКБҝұИҙуЎўФЪБҰЈ¬іӨ¶ИМШРФЙПУлИЛАајЎИвАаЛЖөИУЕөгЎЈУЙУЪЖдҫЯУРИбЛіРФҝЙҝШөДУЕөгЈ¬УҰУГЖш¶ҜИЛ№ӨјЎИвЧчОӘЗэ¶ҜЖчҝЙТФУРР§өШҪвҫцЛ«Чг»ъЖчИЛөДВдөШҪЕіе»чОКМвЎЈТтҙЛЈ¬Ҫ«Жш¶ҜИЛ№ӨјЎИвЧчОӘЛ«Чг»ъЖчИЛөДЗэ¶ҜЖчҫЯУРБјәГөДЗ°ҫ°ЎЈө«КЗЈ¬ИЛ№ӨјЎИвҫЯУРёЯ¶И·ЗПЯРФөДМШөгЎЈІў°йЛжУРіЩЦНПЦПуЈ¬К№өГ¶ФЖдҪЁИБәНҝШЦЖА§ДСЎЈДҝЗ°Ј¬»щУЪЖш¶ҜИЛ№ӨјЎИвөДЛ«Чг»ъЖчИЛөДСРҫҝёХёХЖрІҪЈ¬Ц»УРЙЩКэјёёцЛ«Чг»ъЖчИЛПоДҝ¶ФҙЛҪшРРБЛСРҫҝЎЈұҫОДАыУГMeKibbenЖш¶ҜИЛ№ӨјЎИвҙоҪЁБЛАаЛЖЙъОптЎсю№ШҪЪөДөҘЧФУЙ¶ИИЛ№Ө№ШҪЪЎЈҙЛПөНіөДУІјюІҝ·Ц°ьАЁЖшС№Зэ¶ҜЧУПөНіЎўҙ«ёРЖчЧУПөНіәНҝШЦЖЧУПөНіЎЈФЪҙЛУІјюПөНіЙП№№ҪЁБЛИнјюПөНіЈ¬КөПЦБЛ¶ФҙЛИЛ№Ө№ШҪЪ№мјЈөДёъЧЩҝШЦЖЎЈ»щУЪұҫОДөД№ӨЧчҝЙТФҪшТ»ІҪСРҫҝәНҪвҫцЖш¶ҜИЛ№ӨјЎИвј°№ШҪЪөДҪЁДЈәНҝШЦЖОКМвЈ¬ОӘЙијЖәНҙоҪЁ»щУЪЖш¶ҜИЛ№ӨјЎИвЗэ¶ҜЖчөДЛ«Чг»ъЖчИЛҙтПВ»щҙЎЎЈ 1 Жш¶ҜИЛ№ӨјЎИв№ШҪЪПөНіИнУІјюЙијЖ 1.1 Жш¶ҜИЛ№ӨјЎИв McKibbenЖш¶ҜИЛ№ӨјЎИвКЗУЙГА№ъТҪЙъJoseph.L.MeKibben·ўГчІўТФЖдГыЧЦГьГыөДТ»ЦЦИбРФЖш¶ҜЗэ¶ҜЖчЎЈMcKibbenЖш¶ҜИЛ№ӨјЎИвөДЦчМеЦчТӘУЙНвІгұаЦҜНшәНДЪІгөҜРФПрҪә№ЬЧйіЙЎЈЖдҪб№№ИзНј1ЛщКҫЎЈ  НјlОӘјЎИвҪб№№НјЈ¬ЖдЦРЈ¬PiОӘКдИлЖшС№Ј¬ЖдҙуРЎУЙҝШЦЖЖчёщҫЭКөјК№ӨЧчЗйҝцҪшРРҝШЦЖЎЈөұКдИл¶ЛЖшС№Ц»ФцҙуКұЈ¬ДЪІгПрҪә№ЬЕтХНЈ¬УЙУЪНвІгұаЦҜНшёХ¶ИәЬҙуЈ¬јёәхІ»ДЬЙміӨЈ¬ПЮЦЖјЎИвЦ»ДЬҫ¶ПтұдРО(Цұҫ¶ұдҙуЈ¬іӨ¶ИЛх¶М)Ј¬ІъЙъЦбПтКХЛхБҰ;¶шөұКдИл¶ЛЖшС№PiҪөөНКұЈ¬өјЦВИЛ№ӨјЎИвЙміӨ(ЛЙіЫ)Ј¬јЎИвөДёХ¶Иј°Зэ¶ҜБҰТІҫНЛжЦ®ҪөөНЎЈјЎИвөДёХ¶ИҝЙНЁ№эҝШЦЖПрҪә№ЬДЪөДЖшС№КөПЦЈ¬ХвЦЦјЎЧФҫЯУРұдёХ¶ИМШРФЈ¬ҝЙөИР§ОӘТ»Ц»ұдёХ¶ИөДөҜ»ЙЎЈ 1.2 өҘЧФУЙ¶И№ШҪЪПөНі УЙУЪЖш¶ҜИЛ№ӨјЎИвЦ»ДЬМṩөҘПтЗэ¶ҜБҰЈ¬№КРиУЙБҪМхјЎИвТФАаЛЖЙъОптЎсюјЎөД·ҪКҪ№№іЙ¶Фҝ№РФ»ШЧӘ№ШҪЪТФКөПЦІЩЧчұЫөДБҰұХәПЎЈұҫОДАыУГMcKibbenЖш¶ҜИЛ№ӨјЎИвЧчОӘЗэ¶ҜЖчҙоҪЁБЛөҘЧФУЙ¶ИтЎсю№ШҪЪПөНіЎЈҙЛПөНіөДУІјюІҝ·ЦУЙЖшС№Зэ¶ҜЧУПөНіЎўҙ«ёРЖчЧУПөНіәНҝШЦЖЧУПөНіЧйіЙЎЈПөНіҪб№№НјИзНј2ЛщКҫЎЈ 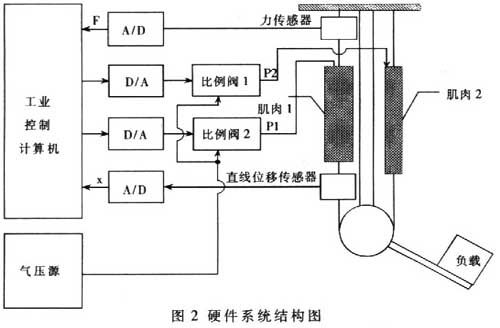 1.2.1 ЖшС№Зэ¶ҜЧУПөНі ЖшС№Зэ¶ҜЧУПөНіУЙЖшФҙЎўС№БҰЛЕ·юұИАэ·§ЎўMcKibbenЖш¶ҜИЛ№ӨјЎИвј°»ъ№№Іҝ·ЦЧйіЙЎЈУЙЖшФҙМṩѹБҰОӘ0.6Ў«0.9MPaөДС№ЛхЖшМе.С№ЛхЖшМеУЙөј№Ьҫӯ№эЛЕ·юұИАэ·§ЛНИЛЖш¶ҜИЛ№ӨјЎИвЦРЎЈГҝМхјЎИвҫщУлТ»ЛЕ·юұИАэ·§ПаБ¬ІўУРТ»іцЖш·§ГЕәНТ»ҪшЖш·§ГЕЎЈНЁ№эҝШЦЖЛЕ·юұИАэ·§ЙПЛщјУөДөзС№јҙҝЙҝШЦЖјЎИвЦРөДЖшМеС№БҰЎЈјУС№әуөДЖш¶ҜјЎИвКдіцКХЛхХЕБҰІўЗэ¶Ҝ»ъ№№Іҝ·ЦөД№ШҪЪЧӘ¶ҜЈ¬ТтҙЛНЁ№э¶ФјЎИвС№БҰөДҝШЦЖјҙҝЙҙпөҪ№мјЈёъЧЩЛщРиөД№ШҪЪБҰҫШЎЈұҫПөНіЦРІЙУГөДMcKibbenЖш¶ҜИЛ№ӨјЎИвОӘFESTO№«ЛҫөДMAS-20-300NРНЈ¬Жд№ӨЧчС№БҰ·¶О§ОӘ0Ў«O.6MPaЈ¬Чоҙу№ӨЧчЖөВКОӘ3HzЈ¬ЧоҙуКХЛхОӘјЎИвіӨ¶ИөД25%Ј¬O.6MPaКұАнВЫЧчУГБҰОӘ300NЈ¬ЦШёҙҫ«¶ИРЎУЪ1%ЎЈС№БҰЛЕ·юұИАэ·§ҪУКЬҝШЦЖ¶Лҙ«ИлөДөзС№КдИлІўНЁ№эөчҪЪідЖш·§ГЕәНҪшЖш·§ГЕҝШЦЖјЎИвДЪЖшС№ЎЈұҫПөНіІЙУГБЛSMC№«ЛҫөДШўITVOO5C-2MLРНС№БҰұИАэ·§ЎЈҙЛ·§өДКдИл·¶О§ОӘ0Ў«5VDCЈ¬КдіцОӘ0.001"0.9MPaЦ®јдөДС№БҰЎЈ 1.2.2 ҙ«ёРЖчЧУПөНі ҙ«ёРЖчЧУПөНіУЙБҰҙ«ёРЖчәНЦұПЯО»ТЖҙ«ёРЖч№№іЙЎЈНЁ№эЦұПЯО»ТЖҙ«ёРЖчҝЙТФІвБҝіцјЎИвөДКХЛхБҝЈ¬ёщҫЭҙЛКХЛхБҝҝЙТФАыУГјЎИвәН№ШҪЪДЈРНҪшРР№мјЈёъЧЩҝШЦЖЎЈБҰҙ«ёРЖчІвБҝјЎИвАӯБҰЈ¬ёщҫЭҙЛАӯБҰУл№ШҪЪБҰҫШөДПЯРФ№ШПөҝЙТФјЖЛгіц№ШҪЪБҰҫШЈ¬ҙУ¶шНкіЙ№ШҪЪөДЛЕ·юұХ»·ҝШЦЖЎЈұҫПөНіЦРІЙУГөДБҰҙ«ёРЖчКЗәҪМмҝЖјјјҜНЕ№«Лҫ7OlЛщөДBK-2FРНёЯҫ«¶ИSРОІвБҰ/іЖЦШҙ«ёРЖчЎЈЖдІвБҝЧчУГБҰөДЧоҙу·¶О§ҝЙҙп80kgЈ¬ҫ«¶ИОӘ0.05%ЎЈКдіцҫӯ№эTS-2РН·ЕҙуЖч·ЕҙуәуЈ¬КдіцөзС№·¶О§ОӘ-5VЎ«+5VЎЈЦұПЯО»ТЖҙ«ёРЖчІЙУГБЛWDLРНЦұ»¬КҪөјөзЛЬБПөзО»јЖЎЈ 1.2.3 ҝШЦЖЧУПөНі ҝШЦЖЧУПөНіУЙ№ӨТөҝШЦЖјЖЛг»ъ(IPC)ЎўA/DІЙјҜҝЁЎўD/AЧӘ»»ҝЁЧйіЙЎЈИнјюҝШЦЖПөНіФЛРРУЪ№ӨТөҝШЦЖјЖЛг»ъЙПЈ¬ІўНЁ№эD/AЧӘ»»ЖчҪ«КэЧЦҝШЦЖБҝЧӘ»»ОӘДЈДвБҝЎЈҙЛДЈДвБҝУГТФҝШЦЖС№БҰЛЕ·юұИАэ·§өДКдіцЖшС№ЎЈA/DЧӘ»»ЖчІЙјҜАӯБҰҙ«ёРЖчәНЦұПЯО»ТЖҙ«ёРЖчөДКэҫЭЈ¬ІўМṩёш№ӨТөҝШЦЖјЖЛг»ъҝЙУЙИнјюҙҰАнөДКэЧЦРЕәЕЎЈұҫПөНіЦРІЙУГөДD/AЧӘ»»ЖчОӘPCL-726РН6НЁөАДЈДвБҝКдіцҝЁЎЈЛьМṩБЛ6ёц12О»Л«»әіеөДДЈДвБҝКдіцНЁөАЈ¬ҝЙВъЧгјЎИвЛЕ·юҝШЦЖөДРиТӘЎЈMDІЙјҜҝЁІЙУГБЛPCL-813BРН12О»32НЁөАA/DҝЁЈ¬ЛьМṩБЛ32НЁөАҙшёфАлөДЦұБчөзС№ІвБҝЈ¬ҫ«¶ИҝЙТФВъЧгПөНіТӘЗуЎЈ 1.3 ИнјюПөНі Жш¶ҜИЛ№ӨјЎИвЗэ¶ҜөДтЎсю№ШҪЪЦРУР2МхјЎИвөДС№БҰОӘПөНіөДҝШЦЖұдБҝЎЈУЙУЪПөНіНЁ№э2ёцЧФУЙұдБҝҝШЦЖТ»ёцЧФУЙ¶ИөДФЛ¶ҜЈ¬ЛщТФ№№іЙБЛИЯУаЗэ¶ҜПөНіЎЈҝЙТФЦӨГчЈ¬ҙЛПөНіҝЙ¶Ф№ШҪЪБҰҫШУл№ШҪЪёХ¶ИҪшРР¶АБўҝШЦЖЎЈЖдЦРЈ¬З°ХЯУл2МхјЎИвС№БҰІоУР№ШЈ¬әуХЯУлјЎИвС№БҰәНУР№ШЎЈНЁ№э¶Ф№ШҪЪБҰҫШөДҝШЦЖҝЙТФКөПЦҫ«И·өД№ШҪЪ№мјЈёъЧЩЈ¬¶шНЁ№э¶Ф№ШҪЪёХ¶ИөДҝШЦЖҝЙТФҪөөНВдөШҪЕіе»чј°ПөНіДЬәДЎЈ ұҫОДФЪ№ӨҝШјЖЛг»ъЦРұаРҙБЛЖш¶ҜИЛ№ӨјЎИв№ШҪЪПөНіөДҝШЦЖИнјюј°ІЩЧчҪзГжЎЈНЁ№эҙЛИнјюПөНіҝЙТФКөПЦјЎИвДЈРНөДІОКэЙи¶Ё ЎўОИ¶ЁөДұХ»·ҝШЦЖј°ҙ«ёРЖч·ө»ШЦөөДКөКұПФКҫәНјЗВјөИ№ҰДЬЎЈИнјюөДЦчМеІҝ·Ц°ьАЁ№мјЈ№ж»®ДЈҝйәНС№БҰҝШЦЖДЈҝйЎЈ№мјЈ№ж»®ДЈҝйКөПЦБЛЙПІгөД№ШҪЪ№мјЈ№ж»®Ј¬ІўёщҫЭ№ШҪЪДЈРНјЖЛгКөПЦЖЪНы№ШҪЪ№мјЈЛщРиөД№ШҪЪБҰҫШЎЈС№БҰҝШЦЖДЈҝйЦҙРРөЧІгјЖЛгЈ¬ЛьөДКдИлБҝОӘЙПІг№ж»®өГөҪөДЖЪНы№ШҪЪБҰҫШЎЈС№БҰјЖЛгДЈҝйёщҫЭЖш¶ҜИЛ№ӨјЎИвөДКөјКДЈРНјЖЛгҝШЦЖјЎИвФЛ¶ҜЛщРиС№БҰЈ¬ЖдФҜіцОӘЖЪНыјЎИвС№БҰЦөЎЈЦЗДЬPIDҝШЦЖЛг·ЁДЈҝйёщҫЭҙЛЖЪНыС№БҰЦөәНA/DІЙјҜөГөҪөДКөјКјЎИвС№БҰКэҫЭҪшРРЦЗДЬPIDҝШЦЖЈ¬ҙУ¶шКөПЦұХ»·ҝШЦЖЎЈЖдКдіцҫӯКэЦөәНD/A»·ҪЪЧӘ»»ОӘКдіцөҪУІјюПөНіөДКөјКҝШЦЖөзС№ЎЈИнјюПөНіөДҝтНјИзНј3ЛщКҫЎЈ 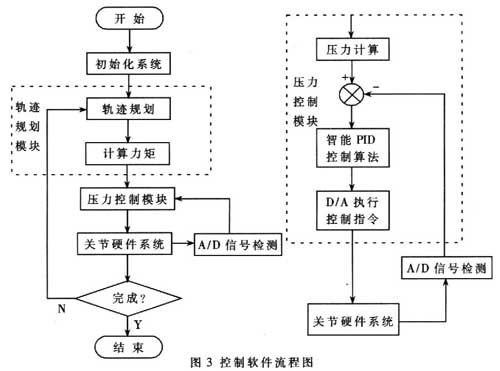 2 КөСйј°ПөНіУҰУГ 2.1 Жш¶Ҝ№ШҪЪПөНіДЈРН ОӘБЛКөПЦ¶ФұҫОДЛщҙоҪЁөДЖш¶ҜИЛ№ӨјЎИвЗэ¶ҜтЎсю№ШҪЪөДЧјИ·ЛЕ·юҝШЦЖ.КЧПИТӘ¶ФЖш¶ҜИЛ№ӨјЎИвҪшРРҪЁДЈЎЈMeKibbenЖш¶ҜИЛ№ӨјЎИвУЙУЪҫЯУР·ЗПЯРФЎўКұұдМШРФЈ¬ІўЗТФЪ№ӨЧчКұ°йЛжУРіЩЦНПЦПуЈ¬Тт¶шДСУЪ¶ФЖдҪшРРҪЁДЈәНҝШЦЖЎЈҙу¶аКэТСУРСРҫҝЦР¶ФУЪMcKibbenЖш¶ҜИЛ№ӨјЎИвөДҪЁДЈ¶јІЙУГChouәНHannaford»щУЪРй№ҰФӯАнёшіцөДАнВЫДЈРНЎЈҙЛДЈРНёшіцБЛјЎИвіцБҰөДАнПл№АјЖЈ¬И»¶шҙЛАнВЫДЈРНЦұҪУУҰУГУЪКөјКҝШЦЖІўІ»ДЬөГөҪБјәГөДР§№ыЎЈұҫСРҫҝЦРІЙУГБЛReynoldsөИМбіцөДИэФӘјЎИв¶ҜБҰС§ДЈРНЈ¬Ҫ«Жш¶ҜјЎИвҪьЛЖОӘУЙ·ЗПЯРФЧиДбТтЧУЎў·ЗПЯРФөҜ»ЙТтЧУәН·ЗПЯРФКХЛхБҰТтЧУІўБӘ№№іЙөД¶ҜБҰС§ПөНіЈ¬ФтДЈРН·ҪіМОӘЈә ЖдЦРЈ¬xОӘјЎИвКХЛхіӨ¶ИЈ¬өұјЎИвНкИ«ЙмХЕКұx=0ЎЈK0ЎўK1ОӘөҜ»ЙТтЧУПөКэЈ¬B0ЎўB1ОӘЧиДбТтЧУПөКэЈ¬F0ЎўF1ОӘКХЛхБҰТтЧУЎЈ¶ФУЪұҫОДІЙУГөДЖш¶ҜИЛ№ӨјЎИвЈ¬НЁ№эФЪұҫПөНіЙПөДКөСйЈ¬ҝЙ¶ФКҪ(1)ЦРөДИэФӘјЎИвДЈРНІОКэҪшРРЧјИ·№АјЖЎЈөұјЎИвС№БҰpИЎЦөФЪ200kPaЎ«650kPaЦ®јдКұЈ¬НЁ№эКөСйөГөҪөДДЈРНПөКэҝЙөГөҪВъТвөДҪьЛЖР§№ыЎЈУҰУГҙЛИэФӘјЎИвДЈРНЈ¬ұҫОДЛщҪйЙЬөДИнјюПөНі¶Ф№ШҪЪҪшРРБЛұХ»·№мјЈёъЧЩҝШЦЖЈ¬ЖдҝШЦЖҫ«¶ИУЕУЪҙ«НіөДАнВЫДЈРНЎЈ 2.2 ПөНіУҰУГ ФЪұҫОД№№ҪЁөДІЙУГИбРФЗэ¶ҜЖчMcKibbenЖш¶ҜИЛ№ӨјЎИвЧчОӘЗэ¶ҜФҙөД»ъЖчИЛөҘЧФУЙ¶ИтЎсю№ШҪЪПөНіЙПЈ¬ҝЙ¶ФMcKibbenРНЖш¶ҜИЛ№ӨјЎИвөДҪЁДЈәНҝШЦЖҪшРРҪшТ»ІҪөДСРҫҝЎЈНЁ№эФЪұҫПөНіЙПөДКөСйЈ¬ФЪ¶ФИэФӘјЎИвДЈРНІОКэҪшРРЧјИ·№АјЖөД»щҙЎЙПЈ¬АыУГұҫОДКөПЦөДҝШЦЖИнјюПөНіҝЙКөПЦБЛұХ»·өД№ШҪЪ№мјЈёъЧЩҝШЦЖЎЈ ФЪҪшТ»ІҪ№ӨЧчЦРЈ¬Ҫ«»щУЪТСУРөДЖҪМЁәНұХ»·ҝШЦЖ·Ҫ·ЁЦШөгСРҫҝБҪёцОКМвЎЈКЧПИСРҫҝ№ШҪЪёХ¶ИҝЙҝШөД№мјЈёъЧЩҝШЦЖЎЈАыУГҙЛИЯУаПөНіөД№ШҪЪёХ¶ИБҝКөПЦУЕ»ҜөДДҝөДЈ¬К№»ъЖчИЛНЁ№эёьәГөШАыУГЧФЙн№ШҪЪөДұ»¶Ҝ¶ҜБҰС§МШРФАҙҪөөНДЬБҝЛрәДЎЈЖдҙОСРҫҝФЪУРіе»чЗйҝцПВНЁ№эҝШЦЖ№ШҪЪёХ¶ИҪөөНіе»чУ°ПмЈ¬Ҫш¶шОӘҙоҪЁУЙЖш¶ҜјЎИвЗэ¶ҜөДЛ«Чг»ъЖчИЛМṩАнВЫЧјұёЎЈ |
НшУСЖАВЫ