
ЕчЛњЧ§ЖЏаОЦЌLMD18200дРэМАгІгУ
ЗЂВМЪБМфЃК2010-12-4 16:56
ЗЂВМепЃКdesigner
|
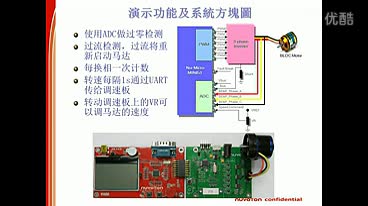
LMD18200ЪЧУРЙњЙњМвАыЕМЬхЙЋЫО(NS)ЭЦГіЕФзЈгУгкжБСїЕчЖЏЛњЧ§ЖЏЕФHЧХзщМўЁЃЭЌвЛаОЦЌЩЯМЏГЩгаCMOSПижЦЕчТЗКЭDMOSЙІТЪЦїМўЃЌРћгУЫќПЩвдгыжїДІРэЦїЁЂЕчЛњКЭдіСПаЭБрТыЦїЙЙГЩвЛИіЭъећЕФдЫЖЏПижЦЯЕЭГЁЃLMD18200ЙуЗКгІгУгкДђгЁЛњЁЂЛњЦїШЫКЭИїжжздЖЏЛЏПижЦСьгђЁЃБОЮФНщЩмСЫLMD18200аОЦЌЕФНсЙЙЁЂдРэМАЦфЕфаЭгІгУЁЃ 1ЁЂ жївЊадФм l ЗхжЕЪфГіЕчСїИпДя6AЃЌСЌајЪфГіЕчСїДя3AЃЛ l ЙЄзїЕчбЙИпДя55VЃЛ l Low RDS(ON) typically 0.3W per switchЃЛ l TTL/CMOSМцШнЕчЦНЕФЪфШыЃЛ l Юо ЁАshoot-throughЁБ ЕчСїЃЛ l ОпгаЮТЖШБЈОЏКЭЙ§ШШгыЖЬТЗБЃЛЄЙІФмЃЛ l аОЦЌНсЮТДя145ЁцЃЌНсЮТДя170ЁцЪБЃЌаОЦЌЙиЖЯЃЛ l ОпгаСМКУЕФПЙИЩШХадЁЃ 2ЁЂ ЕфаЭгІгУ l Ч§ЖЏжБСїЕчЛњЁЂВНЛњЕчЛњ l ЫХЗўЛњЙЙЯЕЭГЮЛжУгызЊЫй l гІгУгкЛњЦїШЫПижЦЯЕЭГ l гІгУгкЪ§зжПижЦЯЕЭГ l гІгУгкЕчФдДђгЁЛњгыЛцЭМвЧ 3ЁЂ ФкВПНсЙЙКЭв§НХЫЕУї LMD18200ЭтаЮНсЙЙШчЭМ1ЫљЪОЃЌФкВПЕчТЗПђЭМ2ШчЭМЫљЪОЁЃЫќга11Иів§НХ,ВЩгУTO-220КЭЫЋСажБВхЪНЗтзАЁЃ   Иїв§НХЕФЙІФмШчЯТЃК в§НХ УћГЦ ЙІФмУшЪі 1ЁЂ11 ЧХБл1ЃЌ2ЕФздОйЪфШыЕчШнСЌНгЖЫ дкНХ1гыНХ2ЁЂНХ10гыНХ11жЎМфгІНгШы10uFЕФздОйЕчШн 2ЁЂ10 HЧХЪфГіЖЫ 3 ЗНЯђЪфШыЖЫ зЊЯђЪБЃЌЪфГіЧ§ЖЏЕчСїЗНЯђМћБэ1ЁЃИУНХПижЦЪфГі1гыЪфГі2ЃЈНХ2ЁЂ10ЃЉжЎМфЕчСїЕФЗНЯђЃЌДгЖјПижЦТэДяа§зЊЕФЗНЯђЁЃ 4 ЩВГЕЪфШыЖЫ ЩВГЕЪБЃЌЪфГіЧ§ЖЏЕчСїЗНЯђМћБэ1ЁЃЭЈЙ§ИУЖЫНЋТэДяШЦзщЖЬТЗЖјЪЙЦфЩВГЕЁЃЩВГЕЪБЃЌНЋИУНХжУТпМИпЕчЦНЃЌВЂНЋPWMаХКХЪфШыЖЫЃЈНХ5ЃЉжУТпМИпЕчЦНЃЌ3НХЕФТпМзДЬЌОіЖЈгкЖЬТЗТэДяЫљгУЕФЦїМўЁЃ3НХЮЊТпМИпЕчЦНЪБЃЌHЧХжа2ИіИпЖЫОЇЬхЙмЕМЭЈЃЛ3НХГЪТпМЕЭЕчЦНЪБЃЌHЧХжа2ИіЕЭЖЫОЇЬхЙмЕМЭЈЁЃНХ4жУТпМИпЕчЦНЁЂНХ5жУТпМЕЭЕчЦНЪБЃЌHЧХжаЫљгаОЇЬхЙмЙиЖЯЃЌДЫЪБЃЌУПИіЪфГіЖЫжЛгаКмаЁЕФЦЋСїЃЈ1.5mAЃЉЁЃ 5 PWMаХКХЪфШыЖЫ PWMаХКХгыЧ§ЖЏЕчСїЗНЯђЕФЙиЯЕМћБэ1ЁЃИУЖЫгы3НХЃЈЗНЯђЪфШыЃЉШчКЮЪЙгУЃЌОіЖЈгкPWMаХКХРраЭЁЃ 6ЁЂ7 ЕчдДе§ЖЫгыИКЖЫ 8 ЕчСїШЁбљЪфГіЖЫ ЬсЙЉЕчСїШЁбљаХКХЃЌЕфаЭжЕЮЊ377 %26;micro;A/AЁЃ 9 ЮТЖШБЈОЏЪфГі ЮТЖШБЈОЏЪфГіЃЌЬсЙЉЮТЖШБЈОЏаХКХЁЃаОЦЌНсЮТДя145ЁцЪБЃЌИУЖЫБфЮЊЕЭЕчЦНЃЛНсЮТДя170ЁцЪБЃЌаОЦЌЙиЖЯЁЃ Бэ1 LMD18200ТпМецжЕБэ PWM зЊЯђ ЩВГЕ ЪЕМЪЪфГіЧ§ЖЏЕчСї ЕчЛњЙЄзїзДЬЌ H H L СїГі1ЁЂСїШы2 е§зЊ H L L СїШы1ЁЂСїГі2 ЗДзЊ L %26;#215; L СїГі1ЁЂСїГі2 ЭЃжЙ H H H СїГі1ЁЂСїГі2 ЭЃжЙ H L H СїШы1ЁЂСїШы2 ЭЃжЙ L X H NONE LMD18200ЙЄзїдРэЃК ФкВПМЏГЩСЫЫФИіDMOSЙмЃЌзщГЩвЛИіБъзМЕФHаЭЧ§ЖЏЧХЁЃЭЈЙ§ГфЕчБУЕчТЗЮЊЩЯЧХБлЕФ2ИіПЊЙиЙмЬсЙЉеЄМЋПижЦЕчбЙЃЌГфЕчБУЕчТЗгЩвЛИі300kHzзѓгвЕФЙЄзїЦЕТЪЁЃПЩдкв§НХ1ЁЂ11ЭтНгЕчШнаЮГЩЕкЖўИіГфЕчБУЕчТЗЃЌЭтНгЕчШндНДѓЃЌЯђПЊЙиЙмеЄМЋЪфШыЕФЕчШнГфЕчЫйЖШдНПьЃЌЕчбЙЩЯЩ§ЕФЪБМфдНЖЬЃЌЙЄзїЦЕТЪПЩвдИќИпЁЃв§НХ2ЁЂ10НгжБСїЕчЛњЕчЪрЃЌе§зЊЪБЕчСїЕФЗНЯђгІИУДгв§НХВНЕНв§НХ10ЃЛЗДзЊЪБЕчСїЕФЗНЯђгІИУДгв§НХ10ЕНв§НХ2ЁЃЕчСїМьВтЪфГів§НХ8ПЩвдНгвЛИіЖдЕиЕчзшЃЌЭЈЙ§ЕчзшРДЪфГіЙ§СїЧщПіЁЃФкВПБЃЛЄЕчТЗЩшжУЕФЙ§ЕчСїуажЕЮЊ10AЃЌЕБГЌЙ§ИУжЕЪБЛсздЖЏЗтЫјЪфГіЃЌВЂжмЦкадЕФздЖЏЛжИДЪфГіЁЃШчЙћЙ§ЕчСїГжајЪБМфНЯГЄЃЌЙ§ШШБЃЛЄНЋЙиБеећИіЪфГіЁЃЙ§ШШаХКХЛЙПЩЭЈЙ§в§НХ9ЪфГіЃЌЕБНсЮТДяЕН145ЖШЪБв§НХ9гаЪфГіаХКХЁЃ 4ЁЂ ЕфаЭгІгУ LMD18200ЕфаЭгІгУЕчТЗШчЭМ3ЫљЪОЁЃ  LMD18200ЬсЙЉЫЋМЋадЧ§ЖЏЗНЪНКЭЕЅМЋадЧ§ЖЏЗНЪНЁЃЫЋМЋадЧ§ЖЏЪЧжИдквЛИіPWMжмЦкРяЃЌЕчЖЏЛњЕчЪрЕФЕчбЙМЋадГЪе§ИКБфЛЏЁЃЫЋМЋадПЩФцЯЕЭГЫфШЛгаЕЭЫйдЫааЦНЮШадЕФгХЕуЃЌЕЋвВДцдкзХЕчСїВЈЖЏДѓЃЌЙІТЪЫ№КФНЯДѓЕФШБЕуЃЌгШЦфЪЧБиаыдіМгЫРЧјРДБмУтПЊЙиЙмжБЭЈЕФЮЃЯеЃЌЯожЦСЫПЊЙиЦЕТЪЕФЬсИпЃЌвђДЫжЛгУгкжааЁЙІТЪжБСїЕчЖЏЛњЕФПижЦЁЃБОЮФжаНЋНщЩмЕЅМЋадПЩФцЧ§ЖЏЗНЪНЁЃЕЅМЋадЧ§ЖЏЗНЪНЪЧжИдквЛИіPWMжмЦкФк,ЕчЖЏЛњЕчЪржЛГаЪмЕЅМЋадЕФЕчбЙЁЃ ИУгІгУЕчТЗЪЧMotorola 68332CPUгыLMD18200НгПкР§згЃЌЫќУЧзщГЩСЫвЛИіЕЅМЋадЧ§ЖЏжБСїЕчЛњЕФБеЛЗПижЦЕчТЗЁЃдкетИіЕчТЗжаЃЌPWMПижЦаХКХЪЧЭЈЙ§в§НХ5ЪфШыЕФЃЌЖјзЊЯђаХКХдђЭЈЙ§в§НХ3ЪфШыЁЃИљОнPWMПижЦаХКХЕФеМПеБШРДОіЖЈжБСїЕчЛњЕФзЊЫйКЭзЊЯђЁЃВЩгУвЛИідіСПаЭЙтЕчБрТыЦїРДЗДРЁЕчЖЏЛњЕФЪЕМЪЮЛжУЃЌЪфГіABСНЯрЃЌМьВтЕчЛњзЊЫйКЭЮЛжУЃЌаЮГЩБеЛЗЮЛжУЗДРЁЃЌДгЖјДяЕНОЋШЗПижЦЕчЛњЁЃ  5ЁЂ НсЪјгя ЕчЖЏЛњЕФЪ§зжПижЦЪЧЕчЖЏЛњПижЦЕФЗЂеЙЧїЪЦЃЌгУЕЅЦЌЛњЖдЕчЖЏЛњНјааПижЦЪЧЪЕЯжЕчЖЏЛњЪ§зжПижЦЕФзюГЃгУЕФЪжЖЮЁЃЪЙгУзЈУХЕФЕчЛњПижЦаОЦЌLMD18200ПЩвдМѕЧсЕЅЦЌЛњИКЕЃЃЌЙЄзїИќПЩППЁЃ |



ЭјгбЦРТл