
应用于光伏水泵系统中的无位置传感器无刷直流电机的控制
发布时间:2010-12-4 16:52
发布者:designer
|
介绍了应用于光伏水泵系统中的直流无刷电机及其控制方法,利用定子绕组反电势信号,用Motorola公司的MC68HC908JK3ECP单片机实现了对直流无刷电机的控制。实验证明,过零点识别电路简单有效,三段式起动适用于光伏水泵系统。 近年来,随着电力电子器件及控制理论的迅速发展,永磁直流无刷电机以其高效性,良好的调速性,易于维护性而得到了广泛的应用。传统的永磁直流无刷电机往往采用位置传感器来确定转子的位置,这不仅增大了电机的安装体积,增加了成本,而且降低了电机的可靠性。目前,无传感器直流无刷电机一般采用三段式起动方式,起动转矩在开始起动时比较小,并且有脉动,对于有起动转矩要求的系统存在着局限性,而在中小型太阳能光伏水泵系统中,负载转矩是随着转速的增加而增加的,不计摩擦力,在静止时负载转矩为零,所以,直流无刷电机可以应用于光伏水泵系统,并且整个系统是直流的,无须逆变,那么,在光伏水泵系统中应用直流无刷电机,对于提高系统效率,简化系统装置就具有重大的意义。 1 光伏水泵系统简介 光伏水泵系统由光伏阵列,控制器,电机,水泵4部分组成。光伏阵列由许多太阳电池串并联构成,直接把太阳能转化为直流电能。目前所用的太阳电池都为硅太阳电池,包括单晶硅、多晶硅及非晶硅太阳电池。由于光伏阵列的输出伏-安特性曲线具有强烈的非线性,而且和太阳辐照度、环境温度、阴、晴、雨、雾等气象条件有密切关系,所以,如果要使光伏水泵系统工作在比较理想的工况,就需要用控制器去调节、控制整个系统。电机是用来驱动水泵的,由于电机的功率因数及电压等级在很大程度上受到太阳电池阵列的电压等级和功率等级的制约,因此,对水泵扬程、流量的要求被反映到电机上,往往在兼顾阵列结构的条件下专门进行设计。对于要求流量小、扬程高的用户,宜选用容积式水泵;对于需要流量较大,但扬程却较低的用户,一般宜采用自吸式水泵。 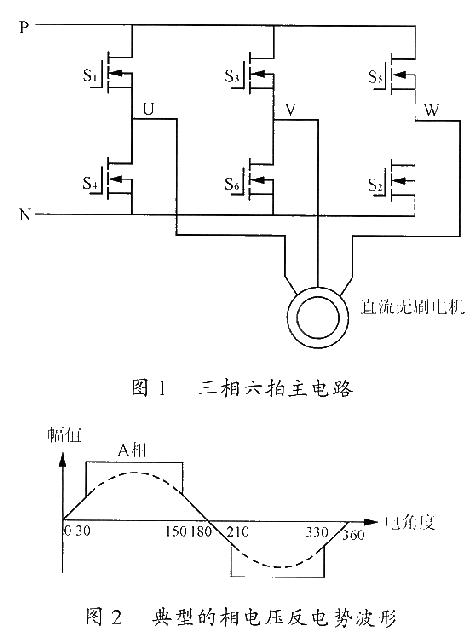 2 单片机M68HC908JK3ECP介绍 这是Motorola公司的8位单片机家族中的成员之一,同样具有高性能,低成本的优点。它内嵌4k闪速存储器FLASH,128字节RAM;具有10个通道的8位精度ADC模块,15个I/O端口;时钟模块具有输入捕捉,输出比较及脉宽调制等功能,能满足系统要求。 3 无传感器直流无刷电机控制原理 无刷电机的定子为三相对称绕组,采用两相通电方式时控制电路按照一定的顺序向定子的两相通入直流电流,产生定子磁势Fa;转子为永磁材料,产生磁势Ff,通过两者的相互作用,可以产生电磁转矩T=FaFf|sinθ|,显然,当θ=60%26;#176;~120%26;#176;时,平均电磁转矩最大。故检测转子磁势位置时,当定转子磁势夹角为60%26;#176;时,三相绕组中的某两相导通,转过60%26;#176;时,其中一相的功率管关断,另一相中的功率管导通。这样,保证定转子磁势夹角为60%26;#176;~120%26;#176;,达到转矩最大的目的。由于每次转过60%26;#176;只关断一个功率管,故每个功率管导通角度为120%26;#176;,这种方式为120%26;#176;导通方式。 主电路采用三相全控桥,如图1所示。图2为三相6拍工作方式下典型的相电压反电势波形图。由图2我们可以清楚地看到,在该相悬空状态(过零点前后30%26;#176;区域)下,绕组感应反电势按正弦规律变化,平顶部分为绕组通电激励时逆变换相主电路电压钳位引起的。换相点发生在过零点后30%26;#176;,使用反电势法来实现电子换相,就是在过零点检测电路检测到过零点后30%26;#176;进行换相。三相6拍工作方式下,导通次序为S1,S2-S2,S3-S3,S4-S4,S5-S5,S6-S6,S1-S1,S2。基于反电势的电子换相方法有多种,如“1/2母线电压比较法”、“端电压比较法”等,但这些测量方法都存在抗干扰能力弱的问题,特别是在PWM调制情况下,测量时必须采取专门措施避开或抑制干扰,增加了控制电路的复杂性,并且可能产生换相滞后。采用“虚拟中点法”可以解决以上问题,并且在PWM调制情况下,其开关噪声不会影响相绕组的过零测量,检测电路也较简单。 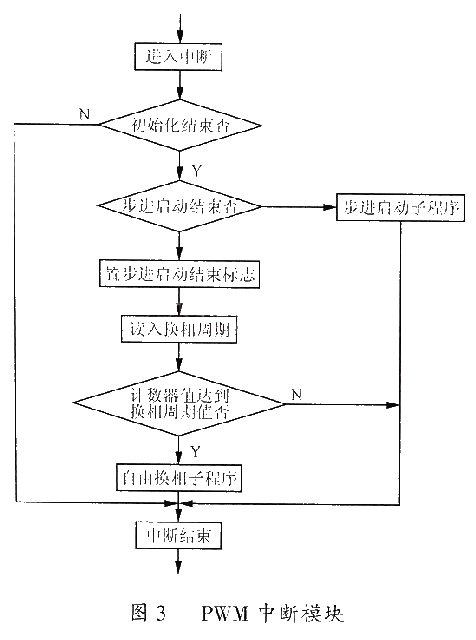 在静止或低速状态下反电势值为0或很小,无法用反电势法来判定转子的位置,通常采用三段式起动方式来解决这个问题,即先按他控式同步电机的运行状态从静止开始加速,当达到一定的转速时再切换到反电势法控制状态,包括转子定位,步进起动和自由切换三个阶段。转子定位时首先导通两个功率管,一般来说先导通S6及S1,一定时间后就完成转子的初始定位。步进起动时从初始位置开始,按前面的导通次序依次导通各功率管,但导通时间按一定规律递减,以达到提速的目的。步进起动结束后进行自由切换,保证换相的正确性,同时,PWM斩波使直流侧电压逐渐加到主电路上,使无刷电机的转速按控制要求加速,相当于电机转速的软起动过程,这样就避免了电机在起动初期会产生大电流,减少了对主电路的冲击,延长了功率管的寿命。 4 系统实现 系统硬件电路由主电路、驱动电路、过零点检测电路、采样电路、各种保护电路组成。过零点检测电路检测到过零信号,并把过零信号送到JK3单片机的捕捉口,JK3单片机接收到过零信号,由软件计算出延迟时间,并在延迟时间到后发出换相脉冲信号,经驱动电路转换为驱动信号去驱动各功率管,这样就实现了单片机对直流无刷电机的控制。保护电路主要有过电压充电保护,低水位保护。 系统软件采用模块化设计,包括初始化模块,PWM中断模块,捕捉中断模块,采样保护模块。PWM中断模块实现了无刷电机的步进起动,自由切换运行。PWM中断模块的流程图如图3所示。 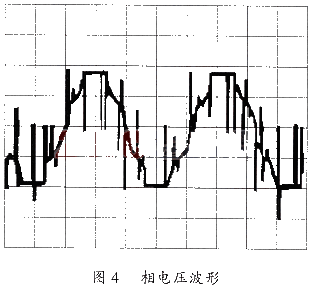 初始化模块主要完成程序所用变量的初始化,PWM中断初始化,捕捉中断初始化,发初始定位脉冲;捕捉中断完成反电势过零点的捕捉及换相周期的确定;采样保护模块主要用来采集直流侧电压和电流,以及判定和处理故障。实验数据证明,换相时刻的准确性和相位跟踪的快速性对电机控制的性能影响极大,电子开关的准确换相点每次都在该相不激励绕组的反电势过零后30%26;#176;的电角度位置,由于电机的运行是变速运行,换相周期是变化的,所以并不能准确确定延迟30%26;#176;电角度的换相时间,只能根据前若干个换相周期的变化趋势,对该次换相时刻进行合理有效的滤波和预估,有数字滤波和锁相跟踪两种方式。 图4为系统正常运行时测得的线电压波形,毛刺部分是由PWM斩波和换相引起的。从图中可以看出,电压波形比较接近于理想情况,说明换相点准确,从而验证了对整个系统控制思想是正确的。 5 结语 上述思想已经在500W太阳能光伏水泵系统中得到验证。系统起动时起动电流正常,步进起动结束后加速平稳。 |



网友评论