
基于ARM单片机的汽车电动助力转向系统的研究
发布时间:2010-12-2 20:29
发布者:conniede
|
电动助力转向系统(EPS)是汽车工程领域的热门课题之一,目前研究的主要内容为EPS系统的控制规则和硬件控制器(ECU)的设计,而控制规则的实现必须以一个稳定、可靠的控制器为基础。现有的控制器多数基于功能增强的8位单片机,也有的用DSP。目前,以32位处理器作为高性能嵌入式系统开发的核心是嵌入式技术发展的必然趋势。ARM处理器因其具有突出的优点在32位微控制器领域里得到非常广泛的应用,在32位嵌入式系统应用中稳居世界第一。在汽车电子技术领域,从车身控制、底盘控制、发动机管理、主被动安全系统到车载娱乐、信息系统等,都离不开嵌入式技术的支持,因此,ARM处理器在汽车电子领域有着良好的应用前景。本文研究了电动助力转向系统(EPS)及其控制器(ECU)的结构和工作原理,并在此基础上研究了基于ARM S3C44B0X单片机的电动助力转向控制系统。 1 EPS工作原理 图1是一个典型的电动助力转向系统原理图。当汽车转向时,转矩传感器测出方向盘的输出转矩,送给控制器ECU,控制器再综合由车速传感器送来的车速信号,并根据相应的控制策略确定一个目标电流,控制电动机转动。电动机的输出转矩通过离合器、减速机构施加给转向柱输出轴,并经过齿轮齿条等转向机构的作用使车轮偏转一定的角度,从而起到对转向系统的助力作用。 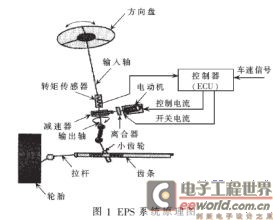 2 控制器的结构和原理 控制器主要由A/D采集电路、H桥电机控制电路和系统保护电路等组成,其结构如图2所示。当车辆启动后,系统接收到点火信号,开始进入工作状态,采集转矩信号和车速信号并送给单片机。根据已定的控制规则,由系统确定一个目标电流和电机转动的方向,并以PWM调制的方式通过H桥电路来驱动电机转动。同时,系统对电机的输出电流进行采样,一方面将采样结果与目标电流相比较,用以对电机进行控制;另一方面结合车速信号,用以对系统的保护。当电机电流大于设定值或车速高于设定值时,为了保护电机和系统的安全,控制器将对继电器发出一个控制信号,断开电机电源,停止助力,待系统正常后,再恢复助力功能。  3 控制器的设计 本文设计的控制器采用32位的ARM S3C44B0X单片机作为控制器的核心,由于S3C44B0X单片机集成了丰富的硬件资源,使得电路设计大为简化,提高了系统的可靠性,同时也为系统将来的扩展和升级留有一定余地。方向控制信号和PWM信号相结合,经光耦加载到H桥驱动电路,控制电机的运行状态,电路简单易行。脉宽调制方式采用单极性PWM,避免了MOS管直通的可能性,不仅可靠,脉宽占空比也易于调整。 3.1 ARM S3C44B0X介绍 SUMSUNG公司的S3C44B0X是基于ARM7 TDMI的体系结构,并在此基础上集成了丰富的外围功能模块,主要有:8KB的Cache,外部扩充存储控制器,LCD控制器,2个UART,5个PWM定时器和1个内部定时器,8路10位ADC,71个通用可编程I/O口,8个外部中断源及看门狗定时器。同时,ARM单片机支持C语言开发,有利于系统控制软件的开发和调试。 3.2 A/D数据的采集 S3C44B0X采用的是逐次逼近式10位ADC,输入电压范围为0~2.5V,转换精度为2.5V/210=2.4mV。对于转矩传感器,其输出电压范围为0~5V,所以只需对信号进行低通滤波处理和分压处理。对于电机的采样电流,由于有正负区别,还应通过电平转换使其成为正电压。其电路如图3所示。其中,R1的作用是将霍尔传感器的输出信号(0~50mA)转换成相应的电压信号。  3.3电机控制电路 电机的控制电路由方向控制电路和光耦隔离MOSFET H桥电机驱动电路组成。电机驱动电路原理如图4所示。T1、T2、T3、T4为光耦部件,一方面用于系统强电和弱电的隔离,另一方面用于驱动MOSFET部件。所以在选择光耦型号时,应选择输出功率较强的光耦(如TLP250,其输出电流最大可达1.5A)。电机的PWM控制信号和方向控制信号都是经光耦后加载到MOSFET部件的。当T1和T4导通、T2和T3关断时,对应的Q1、Q2导通,Q2、Q3关断,电机电流经Q1、MOTOR、Q4流向地,此时电机正转;电机反转时,器件的通断情况正好相反。 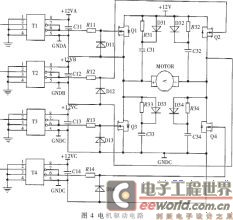 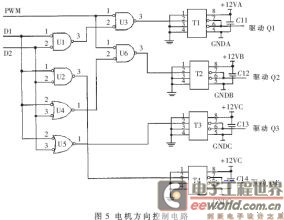 方向控制电路主要由与门和或非门组成,其电路原理如图5所示。U1、U2、U3、U6为与门,U4、U5为或非门,系统采用单极性PWM调制方式,D1、D2为方向控制信号。D1、D2共有四种组合。11时电机正转,00时电机反转,01和10时电机停止。当D1、D2为11时,与门U1、U2输出高电平,其中,U2的信号用于驱动光耦T4,开启MOS管Q4。U3根据PWM信号和U1的信号驱动光耦T1,开启MOS管Q1,即Q1、Q4导通。此时,或非门U4、U5和与门U6的输出为低电平,光耦T2、T3截止,MOS管Q2、Q3关断,电机正转。当D1、D2为00时,情况正好相反,T1、T4截止,Q1、Q2关断,T2、T3开启,Q2、Q3导通,电机反转。 3.4 电路的保护设计 保护电路主要由MOSFET缓冲电路和系统的继电器保护电路组成。开关器件在开通和关断过程中可能同时承受过压、过流、过大的di/dt、du/dt以及过大的瞬时功率,缓冲电路就是在开关过程中保护开关器件,抑制高电压和大电流的防护措施。本设计采用的是RCD充、放电缓冲电路,如图6所示。当MOSFET关断时,经二极管D向电容C充电,由于二极管正向导通时压降很小,所以关断时的过压吸收效果与电容的吸收效果相当。当MOSFET开通时,电容C通过电阻R放电,限制了MOSFET中的开通尖峰电流。RCD缓冲电路能有效地改善开关器件的开关特性,减小开关器件本身的功耗发热。 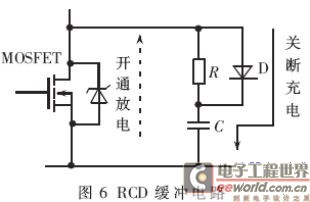 继电器保护电路主要是用于电机的过流保护并确保EPS在设定的车速范围内工作。ECU通过对电机电流的采样来确保电机工作在额定电流范围内。一旦电机电流高于设定的保护值,或车速超出设定范围,ECU就会向继电器发出一个关断信号,切断电机的电源,停止助力。 4 系统控制策略及仿真 国内外学者研究了不同的EPS控制策略,如PID控制[5~6]、H_∞鲁棒控制、模糊控制等。由于转矩信号和车速信号的输入特点非常适合采用模糊控制,而PD控制则具有较好的控制性能,因而综合这两种方法的特点,本文采用了模糊PD控制策略。其控制结构框图如图7所示。 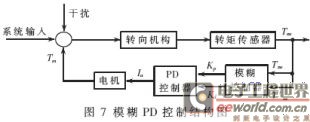 这里,系统输入为地面反作用力矩,Tsw为方向盘把持力矩,Kp为PD控制的比例系数,Kd为PD的微分系数,Ia为目标电流,Tm为电机输出转矩。模糊控制器通过对转矩传感器信号的采集,在线整定Kp、Kd参数,用于PD控制,再由PD控制来确定系统的目标电流。在MATLAB环境下应用上述控制策略对EPS系统进行原地转向仿真,给定如图8所示的转向盘转向力矩的输入曲线,设定系统电流上限为30A。经过仿真计算得到的EPS系统对该输入的电流响应如图9所示。 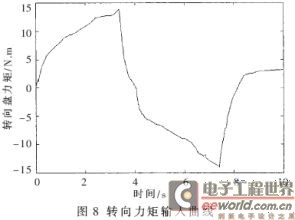 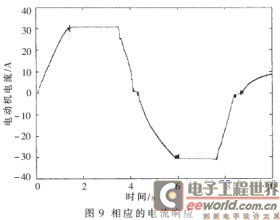 从仿真结果可以看出,采用该种控制策略,电动机输出电流对方向盘输入转矩有较好的跟踪性能,说明本文研究的模糊PD控制策略具有良好的助力效果。 |


网友评论