
ЕЅФПЪгОѕГЕЕРЦЋРыБЈОЏЯЕЭГ
ЗЂВМЪБМфЃК2010-11-29 16:04
ЗЂВМепЃКtechshare
|
вЛЁЂв§бд дкЪРНчЗЖЮЇФкЃЌЙЋТЗНЛЭЈЪТЙЪЕМжТОЊШЫЕФШЫдБЩЫЭіКЭОМУЫ№ЪЇЁЃОнЭГМЦЃЌдМга44%ЕФЦћГЕЪТЙЪгыГЕСОЦЋРые§ГЃГЕЕРааЪЛгаЙиЃЌЦфжївЊдвђЪЧМнЪЛдБзЂвтСІВЛМЏжаЛђепЦЃРЭМнЪЛЃЌдьГЩГЕСОЕФЮовтЪЖЦЋРыЁЃГЕЕРЦЋРыБЈОЏЯЕЭГЃЈМђГЦLDWSЛђRDWSЃЉе§ЪЧЛљгкЛљБОНЛЭЈЙцдђЕФГЕСОАВШЋЯЕЭГЃЌЦфжївЊЙІФмЪЧИЈжњЙ§ЖШЦЃБЙЛђепГЄЪБМфЕЅЕїМнЪЛЕФМнЪЛдББЃГжГЕСОдкГЕЕРФкааЪЛЁЃгЩгкLDWSОпгаЯджјЬсИпГЕСОааЪЛжїЖЏАВШЋадЕФЧБСІЃЌЕУЕНСЫЙњФкЭтбаОПШЫдБдНРДдНЖрЕФжиЪгЁЃвђДЫИУЯЕЭГОпгаЙуЗКЕФЪаГЁЧБСІгыгІгУМлжЕЁЃ ЖўЁЂЯЕЭГзмЬхЩшМЦ ГЕЕРЦЋРыБЈОЏЯЕЭГЕФЯЕЭГзмЬхЩшМЦШчЭМ1ЫљЪОЃЌжївЊАќРЈШэМўЩшМЦМДШЫЛњНчУцЩшМЦКЭгВМўЩшМЦСНДѓВПЗжЁЃШЫЛњНчУцЮЊPCЖЫЩЯЕФЭМаЮЛЏПижЦЬЈЃЌгУгкФЃФтЦћГЕЕФжЦЖЏаХКХКЭзЊЯђаХКХвдМАГЕЫйаХКХЕШЃЌЭЈЙ§ДЎПкНЋаХКХДЋЫЭИјDSPЃЌЭЌЪБЯдЪОгЩDSPЫЭРДЕФГЕСОЦЋРыЪ§ОнКЭЪЕЪБЕРТЗГЁОАЁЃгВМўВПЗжгЩDSPЙЙГЩЃЌИКд№ЪЕЪБГЕЕРМьВтгыЪЖБ№ЃЌГЕЕРЦЋРыСПЕФМЦЫуЁЃ 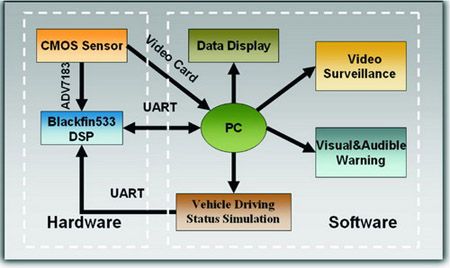 ЭМ1ЯЕЭГЩшМЦ ЯЕЭГЭЈЙ§ЭМЯёДЋИаЦїЛёШЁГЕЕРМИКЮНсЙЙЃЌЭЈЙ§ГЕСОдЫЖЏВЮЪ§ДЋИаЦїЛёШЁОіВпЫуЗЈЫљБиашЕФГЕСОдЫЖЏВЮЪ§ШчГЕЫйЁЂГЕСОзЊЯђзДЬЌЕШЃЌзлКЯЗжЮіХаЖЯГЕСОЦЋРыГЕЕРЕФГЬЖШЁЃШчЙћГЕСОЦЋРыСПГЌЙ§ЩшЖЈуажЕЃЌПижЦЬЈНчУцЩЯЕФБЈОЏЕЦНЋЛсЩСССЃЌЭЌЪБЗЂГіЗфУљБЈОЏЩљЁЃ Ш§ЁЂШЫЛњНчУцЩшМЦ дкШЫЛњНчУцЩшМЦЩЯВЩгУVisualC++6.0ПЊЗЂЛЗОГКЭNIЙЋЫОЕФMeasurement StudioБрГЬЙЄОпЙВЭЌПЊЗЂЃЌгУVCЭъГЩГЬађЕФжївЊЙІФмЃЌгУMeasurement StudioЕФОЋУРПиМўЭъГЩГЬађЕФНчУцБрГЬЁЃдкЯЕЭГгыDSPЭЈаХЩЯЮвУЧВЩгУЮЂШэЙЋЫОЕФMSSCOMПиМўНјааБрГЬЃЌМѕаЁЙЄзїСПЃЌНЕЕЭПЊЗЂФбЖШЁЃШэМўЯЕЭГЗжЮЊШ§ИіФЃПщЃКЯдЪОФЃПщЁЂПижЦФЃПщЁЂЭЈаХФЃПщЁЃЯдЪОФЃПщИКд№НЋDSPЗЂРДЕФБЈОЏаХКХЃЌГЕЕРЦЋвЦаХКХНјааЭМаЮЛЏЯдЪОЃЌПижЦФЃПщжївЊЯђDSPЗЂЫЭПижЦУќСюЃЌЭЈаХФЃПщИКд№PCгыDSPМфаХКХЕФНЛЛЅЁЃШЫЛњНчУцИїФЃПщМфЕФЙиЯЕШчЭМ2ЫљЪОЁЃ 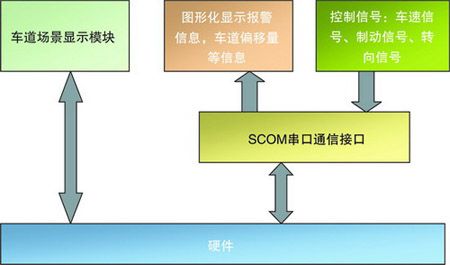 ЭМ2ШЫЛњНчУцЩшМЦ ЫФЁЂгВМўЩшМЦ ЯЕЭГгВМўжївЊЪЧвдDSPЮЊКЫаФЕФЪЕЪБДІРэЦНЬЈЃЌжївЊЭъГЩЭМЯёВЩМЏЁЂГЕЕРМьВтгыЪЖБ№ЁЂГЕЕРЦЋвЦСПМЦЫуЕШЙІФмЃЌВЂНЋМЦЫуНсЙћДЋЫЭИјПижЦЬЈНчУцзїЖЏЬЌЯдЪОЁЃ DSPгВМўЯЕЭГАќРЈЪгЦЕA/DФЃПщЁЂЪЕЪБЭМЯёДІРэФЃПщЁЂЪгЦЕD/AФЃПщЁЂUARTЭЈаХФЃПщЁЂЭтВПДЂДцЦїФЃПщЁЃЪгЦЕA/DФЃПщВЩгУADV7183ЪгЦЕНтТыаОЦЌЃЌЭМЯёДІРэаОЦЌВЩгУADIЙЋЫОЕФBlackfin-533ЖрУНЬхЪ§зжаХКХДІРэЦїЃЌADM3202RS-232ЭЈгУвьВНЪеЗЂЦїЁЃDSPЯЕЭГПђЭМШчЭМ1зѓЗНащЯпПђЫљЪОЁЃ дкПЊЗЂжаЮвУЧВЩгУADIЙЋЫОЕФBF-533EZ-KitLiteЦРЙРАхЃЌИУЦНЬЈОпгаСМКУЕФПЩВйзїадКЭЗсИЛЕФЭтЩшНгПкЃЌЮЊЮвУЧНЕЕЭСЫЯЕЭГПЊЗЂФбЖШЃЌНкдМСЫЪБМфЁЃ дкDSPЖЫЃЌЭМЯёОCMOSЩуЯёЭЗзЊЛЛГЩЪгЦЕаХКХЫЭШыADV7183ЪгЦЕБрТыЦїЃЌЮвУЧДгНтТыЪгЦЕСїжаЕФССЖШЗжСПЛёЕУЛвЖШЭМЯёађСаЃЌЪзЯШНјааЭМЯёдЄДІРэЃЌгЩ3ЁС3ЕФИпЫЙФЃАхЖдЭМЯёНјааТЫВЈЃЌТЫГ§ВПЗжЫцЛњдыЩљЃЌШЛКѓНјааГЕЕРБъжОМьВтЁЃгЩгкНсЙЙЛЏЕРТЗЩЯЕФГЕЕРБъЪЖЯпгыТЗУцБГОАОпгаНЯЧПЕФЖдБШЖШЃЌГЕЕРБпдЕНЯУїЯдЃЌвђДЫРћгУБпдЕМьВтЫуЗЈФмЙЛНЯКУЕиМьВтГіГЕЕРБпдЕЁЃФПЧАНЯКУЕФБпдЕМьВтЫуЗЈЪЧCannyЗЈЃЌМьВтЕФГЕЕРБпдЕзМШЗЃЌЯпЬѕНЯЯИЃЌЕЋЪЧМЦЫуСПДѓЁЃSobelЫуЗЈЯрЖдгкCannyЗЈЕФЯпЬѕНЯДжЃЌЕЋМЦЫуСПНЯаЁЃЌБугкЪЕЪБЯЕЭГгІгУЁЃвђДЫЃЌЯЕЭГВЩгУСЫSobelЗЈЃЌШЛКѓВЩгУOstuЗЈЖдБпдЕдіЧПЕФЭМЯёађСаНјааЖўжЕЛЏЃЌИУЫуЗЈФмЙЛздЖЏШЗЖЈЗжИюуажЕЃЌЪЙЧАОАгыБГОАСНРрЕФЗНВюзюДѓЁЃ ОЙ§ЗжИюКѓЕФЖўжЕЭМЯёжаАќКЌСЫГЕЕРБъЪЖЯпЃЌЕЋЛЙКЌгаКмЖрдгЩЂЯпЬѕЃЌвђДЫвЊЖдГЕЕРЯпНјааЪЖБ№ЃЌНЋЦфДгдгЩЂЯпЬѕжаЬсШЁГіРДЁЃЛљгкЖдЕРТЗЕФЯШбщжЊЪЖЃЌШ§ЮЌГЁОАжаЕФжБЯпЭЖгАЕНЖўЮЌЦНУцЩЯврЮЊжБЯпЃЌЖјЪЕМЪЕРТЗжаГіЯжжБЕРЕФИХТЪдЖДѓгкЭфЕРГіЯжЕФИХТЪЃЌЫљвдЮвУЧВЩгУСЫМђЛЏЕФЕРТЗФЃаЭЃЌМДжБЯпГЕЕРФЃаЭЁЃМьВтжБЯпЕФГЃгУЗНЗЈЪЧHoughБфЛЛЃЌгЩгкБъзМHoughБфЛЛМЦЫуСПЬЋДѓЃЌВЛФмдкDSPЩЯЪЕЯжЃЌЮвУЧНЋЭМЯёАДживЊадЗжЮЊШ§ИіЧјгђШчЭМ3ЫљЪОЁЃ 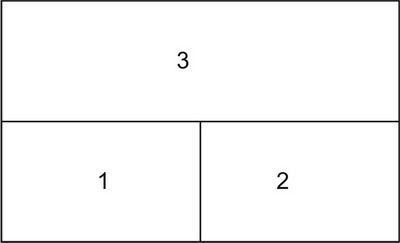 ЭМ3ЭМЯёЧјгђЪОвтЭМ ЮвУЧжЛдкЧјгђ1КЭЧјгђ2зіHoughБфЛЛЃЌЧјгђ3ВЛзіДІРэЃЌВЂдіДѓСЫHoughБфЛЛЕФНЧЖШЫбЫїВНГЄЃЌНјвЛВНМѕаЁМЦЫуСПЁЃЧјгђ1жаМьВтЕНаБТЪдкЃЈ0ЃЌ90ЃЉЖШЁЂГЄЖШЮЊ30ЯёЫивдЩЯЕФжБЯпЖЮХаЖЈЮЊзѓГЕЕРЃЌдкЧјгђ2жаМьВтЕНЕФаБТЪдкЃЈ0ЃЌ-90ЃЉЖШЁЂГЄЖШЮЊ30ЯёЫивдЩЯЕФжБЯпЖЮЮЊгвГЕЕРЁЃ ЕБГЕЕРМьВтГіРДвдКѓЃЌашвЊИљОнГЕЕРаХЯЂХаЖЯГЕСОдкГЕЕРжаЕФЮЛжУЃЌвђДЫГЕЕРЦЋРыОіВпЫуЗЈвВЪЧГЕЕРЦЋРыБЈОЏЯЕЭГЕФЙиМќЃЌЫќжївЊЪЧШЗЖЈвЛИіКЯЪЪЕФдЄОЏСПЯђМнЪЛдБЬсЙЉБЈОЏЃЌФмЙЛБЃжЄМАЪБКЭзМШЗБЈОЏЃЌЭЌЪБВЛЛсЖдМнЪЛдБдьГЩЙ§ЖрЕФИЩШХЁЃФПЧАГЃгУЕФЦЋРыОіВпЫуЗЈЖМашвЊЖдЯрЛњНјааБъЖЈЃЈШчTLCЗНЗЈЃЉЃЌдіМгСЫЯЕЭГЕФИДдгадЃЌВЂИјАВзАДјРДВЛБуЁЃБОЯЕЭГВЩгУЕФГЕЕРМаНЧЗЈЃЌВЛашвЊЖдЯрЛњНјааБъЖЈЃЌАВзАЪБ БЃГжЯрЛњгыГЕСОЦНааМДПЩЁЃШчЙћГЕСОЕФзѓгвГЕЕРМаНЧжЎКЭГЌЙ§ФГвЛЩшЖЈуажЕЃЌдђШЯЮЊГЕСОЦЋРые§ГЃГЕЕРЃЌЯЕЭГИљОнЕБЧАааЪЙзДПізлКЯХаЖЯМнЪЛдБЪЧЗёЮовтЪЖЦЋРыСЫааГЕЕРЃЌВЂЗЂГіБЈОЏЃЌЬсабМнЪЛдБОРе§ааГЕТЗЯпЁЃЭМ4ЮЊГЕЕРЦЋРыЫуЗЈСїГЬЭМЁЃ 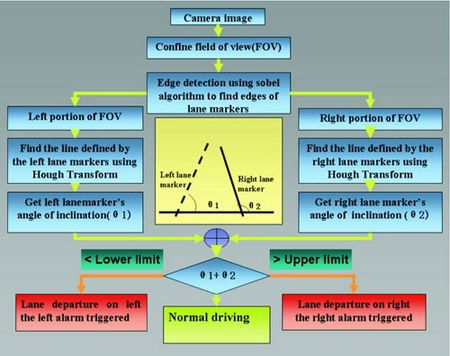 ЭМ4ГЕЕРЦЋРыЫуЗЈСїГЬЭМ ЮхЁЂЗТецНсЙћгыЗжЮі ЭМ5ЃЈaЃЉЮЊГЕСОЮЛгкГЕЕРжааФИННќааЪЛЃЌЃЈbЃЉЮЊГЕСОЮЛгкГЕЕРЦЋзѓааЪЛЃЌЃЈcЃЉЮЊГЕСОЮЛгкГЕЕРЦЋгвааЪЛЃЌЃЈdЃЉЃЈeЃЉЃЈfЃЉЗжБ№ЮЊЃЈcЃЉЃЈbЃЉЃЈcЃЉЫљЪОааЪЙзДЬЌЯТЕФПижЦЬЈЯдЪОНчУцЁЃШчЃЈdЃЉЫљЪОЃЌЕБГЕСОЮЛгкГЕЕРжааФИННќааЪЙЪБЃЌГЕЕРЦЋвЦСПЕФжЕдк0жЕИННќАкЖЏЃЌБэЪОГЕСОВЂЮДЗЂЩњЦЋРыЃЌДЫЪБЦЋРыБЈОЏЕЦвВЮДЕуССЁЃШчЃЈeЃЉЫљЪОЃЌЕБГЕСОЮовтЪЖааЪЛЕНГЕЕРзѓБпЪБЃЌГЕЕРЦЋвЦСПдк-20ЕН-30жЎМфАкЖЏЃЌДЫЪБзѓЦЋБЈОЏЕЦЩСССЃЌЭЌЪБЗЂГіНЯЕЭЦЕТЪЕФЗфУљБЈОЏЩљЃЌБэЪОГЕСОЯђзѓЦЋРыЁЃЕБГЕСОЦЋЯђгвБпГЕЕРЪБШчЃЈcЃЉЫљЪОЃЛЦЋвЦСПЕФжЕдк20ЕН30жЎМфБфЛЏЃЌгвЦЋБЈОЏЕЦЩСССЃЌВЂЗЂГіНЯИпЦЕТЪЕФЗфУљБЈОЏЩљЃЌШчЭМЃЈfЃЉЫљЪОЁЃ ГЕСОдкащЯпЕРТЗЩЯааЪЛЕФЧщПіШчЭМ6ЫљЪОЃЌЃЈbЃЉБэЪОГЕЕРЦЋРыСПдк0жЕИННќБфЛЏЃЌЫЕУїГЕСОУЛгаЗЂЩњЦЋРыЃЌЃЈcЃЉЮЊГЕСОзѓЦЋЪБЕФЦЋРыСПЕФжЕЃЌЦфжЕдк-20ИННќБфЛЏ ЃЌЃЈdЃЉЮЊГЕСОгвЦЋЪБЕФЦЋРыСПжЕЃЌЦфжЕдк-20ЕН-30жЎМфБфЛЏЁЃ  ЭМ5ГЕСОдкЪЕЯпГЕЕРЩЯааЪЛЕФЪЕбщНсЙћ 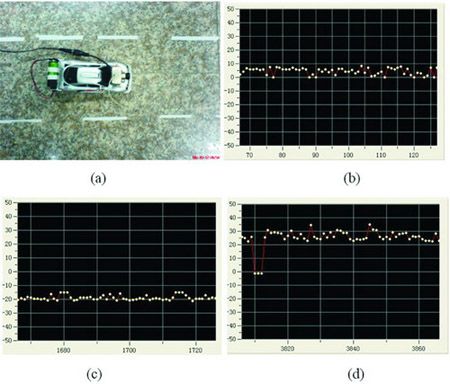 ЭМ6 ДгвдЩЯФЃаЭГЕСОЕФЪЕбщНсЙћПЩвдПДГіЃЌЯЕЭГФмЙЛНЯКУЕиЪЪгІВЛЭЌЯпаЭЕФГЕЕРЯпЃЌВЂФмдкФЃаЭГЕСОЦЋРыЪБзіГіе§ШЗЕФХаЖЯЃЌЗЂГіВЛЭЌЕФБЈОЏЬсЪОЃЌДяЕНСЫЩшМЦвЊЧѓЁЃ |




ЭјгбЦРТл