
基于DSP的空间电压矢量PWM技术研究
发布时间:2010-11-25 23:06
发布者:designer
|
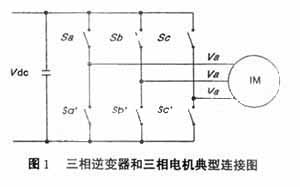
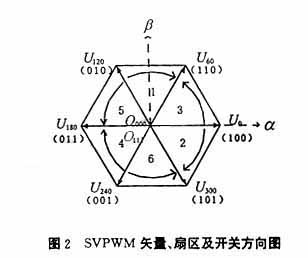
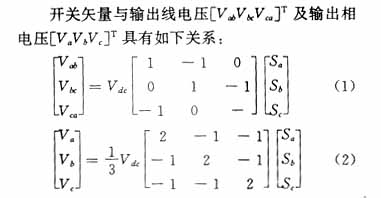
1 引言 近年来,在高性能全数字控制的电气传动系统中,作为电力电子逆变技术的关键,PWM技术从最初追求电压波形正弦,到电流波形正弦,再到磁通的正弦,取得了突飞猛进的发展。在众多正弦脉宽调制技术中,空间电压矢量PWM(或称SVPWM)是一种优化的PWM技术,能明显减小逆变器输出电流的谐波成分及电机的谐波损耗,降低脉动转矩,且其控制简单,数字化实现方便,电压利用率高,已有取代传统SPWM的趋势。本文对空间电压矢量PWM的原理进行了深入分析,重点推导了每一扇区开关矢量的导通时间,并在TI公司生产的DSP上实现三相逆变器的控制,证明了分析的正确和可行性。 2 空间电压矢量PWM原理 图1为三相电压源逆变器示意图,Sa、Sb、Sc为逆变器桥臂的开关,其中任一桥臂的上下开关组件在任一时刻不能同时导通。不考虑死区时,上下桥臂开关互逆。将桥臂输入点a、b、c的开关状态用下面的开关函数表示: Sk=1(桥臂k,上桥臂导通,下桥臂关断);Sk=0(桥臂k,上桥臂关断,下桥臂导通)。由a、b、c的不同的开关组合,可以有23=8个开关矢量(Sa Sb Sc),即V0(000)~V7(111),其中有六个有效开关矢量V1~V6和两个零开关矢量V0和V7。利用V0~V78个矢量的线性组合可以近似模拟等幅旋转向量,由磁链和电压间简单的积分关系,可知此时实际的电机气隙磁通轨迹接近圆形。图2为SVPWM矢量、扇区及每个扇区开关方向图。按图2,有表1所示扇区号与k的关系。
其中k为以a轴为起点,以π/3为单位,逆时针方向排列的序号,若θ为矢量与α轴夹角,则有
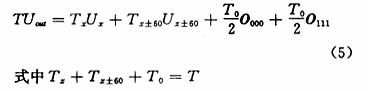
SVPWM技术的目的是通过合成与基本矢量相应的开关状态,得到参考电压Uout。对于任意小的时间周期T,逆变器输出平均值与Uout平均值相等,如式(3)所示:
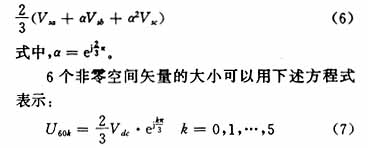
其中Tx、Tx+60(或Tx-60)分别为一个周期内,开关状态Ux、Ux+60(或Ux-60)对应的作用时间,Ux与Ux+60(或Ux-60)是合成Uout的基本空间矢量。如果假定在很小的时间T内参考电压Uout的变化很小,则式(3)可以变为式(4):
在一个完整的调制周期T内,除了Tx和Tx±60的导通时间,其余为零矢量O000和O111作用时间(零状态时间)T0,当作用时间相等时,直流利用率可以大大提高,故可将(4)式表示为(5)式:
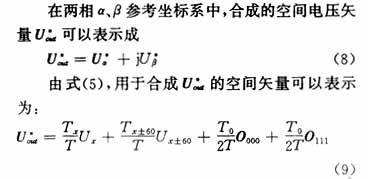
根据三相系统向两相系统变换保持幅值不变的原则,定子电压的空间矢量可以表示为:Us=
式中,Vdc为逆变器的直流母线电压,而两个零矢量则用O000和O111表示,其实际值为0。
考虑到在具体实现SVPWM时,零状态存在于每一个区域中,一般每个调制周期均以O000开始,同时为减少开关损耗,相邻两个作用矢量只有一个开关量变化,即(Sa Sb Sc)中只有一个变化,故在O000之后应将U0、U120、U240选作作用矢量,即在每个扇区中非零矢量的作用顺序如图2所示。同时,注意到相反方向的两个矢量(即空间上相差180°的两个矢量,如U60与U240),其开关量(110)与(001)完全互补,故我们可以通过计算0~180°范围内(即3、1、5扇区)每个矢量的作用时间推出180°~360°矢量作用时间,进而计算出所有扇区的矢量作用时间。 当k=1时,相应的电压矢量为U0和U60,由(7)式知:
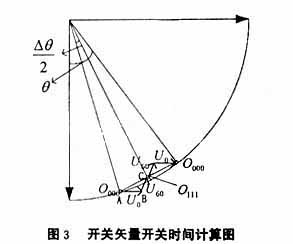
3 开关矢量开关时间的计算 由上述分析,我们可以画出如图3所示的开关矢量开关时间计算图[3],图3是k=1时开关时间计算图,注意到为使计算方便,坐标系如图3定义:
其 中Ui——线电压有效值; Up——相电压有效值; Λ——每相磁链有效值; Upm——相电压幅值。 代入式(10),可得:
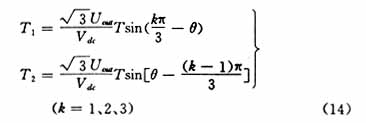
综合以上三式,可得出k=1、2、3时一个周期内两个相邻矢量的作用时间:
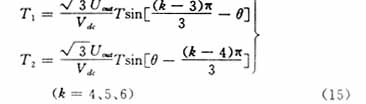
由前面的分析可知,k=4、5、6时一个周期内相应矢量的作用时间分别与k=1、2、3时作用矢量顺序相反而时间值相等,即
式(14)、(15)组成了SVPWM中各扇区相应电压矢量的作用时间表达式,本文后面的软件实现中将直接利用该结果。
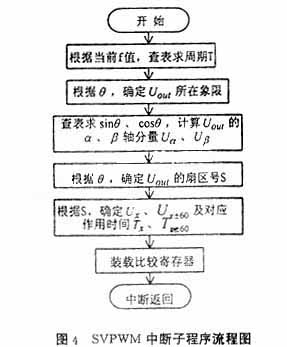
4 基于TMS320F240的空间矢量脉宽调制技术的算法实现 采用TMS320F240系统实现SVPWM具有精度高且实现方便的特点。TMS320F240系统的指令周期为50 ns,运算速度快;指令系统丰富灵活,指令效率高;有544k字片内RAM,16k字闪存(FlashEEPROM);3个全比较单元输出六路互补PWM[4]。在实现SVPWM的过程中,可以采用定时器连续加/减计数从而生成对称PWM。 软件实现中,以Uα、Uβ作为输入,直流母线电压Vdc为参数,输出为三相对称PWM模式。程序编写包括主程序和一个定时器周期寄存器中断子程序,主程序根据电机控制策略计算出所需要的频率f,等待中断的产生。在定时器中,根据此时f和Uout的当前位置确定出下一个载波周期中Uout的位置,查转换模式表得到需要的两个作用矢量,并计算出它们的作用时间T1,T2。 图4为SVPWM中断的子程序流程图。在进入中断前,系统配置、外设、I/O、GP定时器及各变量均已初始化完毕。
下面对该流程图具体实现作一说明。 (1)判断矢量Uout所处扇区
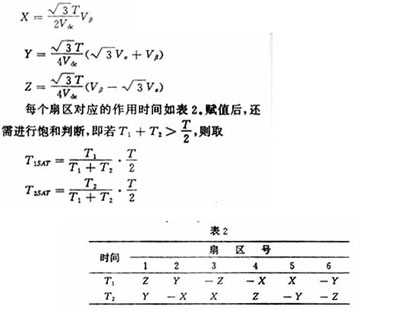
(2)确定每个扇区中相应电压矢量的作用时间 事实上,由前面的分析可知,由于三角函数具有对称性和周期性,两个相邻电压矢量的作用时间Tx、Tx±60只有三个数值,具体实现时,由于是对称PWM,故将Tx、Tx±60分成对称的两个部分,即下述的X,Y,Z:
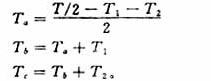
(3)确定开关顺序,为比较寄存器赋值 定义电压矢量变化点距离时间零点的时间间隔分别为Ta、Tb、Tc,则有:
由每个扇区的工作图,为每个扇区的比较寄存器赋值如表3:
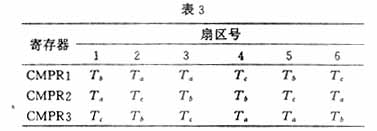
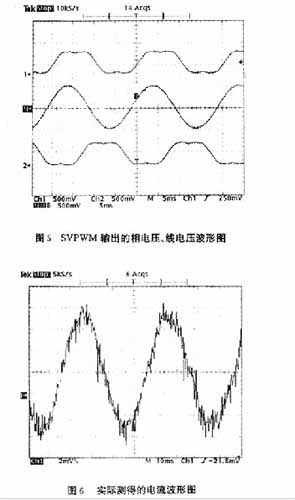
5 实验结果 本文结合电动汽车电机控制系统,采用TMS320F240 DSP汇编语言编写了开环、载波频率为10 kHz、变频范围为0~100 Hz的SVPWM控制程序。逆变器逆变开关采用IGBT,直流电源为蓄电池,驱动的电机为三相异步电机,定子绕组星形接法,并带一它励直流发电机作为负载。程序每周期内只发生一次定时器周期中断,实时性好,且占用CPU较少,使CPU有很大能力去完成其它任务,实现更复杂、完善的电机控制。实验结果证明了该算法的正确性。图5、图6分别为控制器输出经过低通滤波后的相电压、线电压波形和实际测得的电流波形图。由图中可见,电压电流的正弦性很好,消除谐波明显,SVPWM是一种较为优化的PWM。
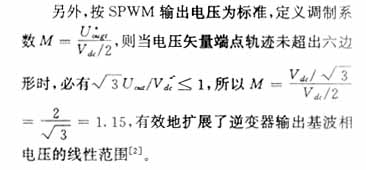
6 结论 本文详细阐述了空间电压矢量SVPWM技术的原理,推导了每个扇区开关矢量的作用时间,提出了用一半扇区的开关时间代替全部开关时间的算法,并在TI公司生产的DSP上实现。经过分析和实验,结果表明: (1)在相同的直流母线电压下,采用SVPWM方式有效地扩展了逆变器输出基波相电压的线性范围,其线性范围内的输出最大基波相电压幅值是传统SPWM输出最大基波相电压的1.15倍,能有效提高电源电压利用率。 (2)只计算0~180°范围内(即3、1、5扇区)每个矢量的作用时间,再利用各扇区间矢量的关系及开关顺序,推出180°~360°矢量的作用时间,进而计算出所有扇区的矢量作用时间,是完全可能及正确的。 (3)在高性能全数字化的矢量控制系统中,应用DSP处理器,如TI公司生产的TMS320F24x系列产品,由于DSP快速的运算能力和数据处理能力,空间电压矢量PWM技术实现更准确、方便,更接近理想正弦磁通控制。 |











网友评论