
”…DSP–ΨΤ§…ζ≥…Βγ―ΙΩ’Φδ ΗΝΩ¬ωΩμΒς÷Τ≤®
ΖΔ≤Φ ±ΦδΘΚ2010-11-25 22:59
ΖΔ≤Φ’ΏΘΚdesigner
|
1ΓΓ“ΐΓΓ―‘ ‘ΎΒγΤχ¥ΪΕ·÷–Θ§ΙψΖΚ”Π”Ο¬ωΩμΒς÷ΤΘ®PWMΘ≠Pulse Width ModulationΘ©ΩΊ÷ΤΦΦ θΓΘΥφΉ≈ΒγΤχ¥ΪΕ·œΒΆ≥Ε‘ΤδΩΊ÷Τ–‘ΡήΒΡ“Σ«σ≤ΜΕœΧαΗΏΘ§»ΥΟ«Ε‘PWMΩΊ÷ΤΦΦ θ’ΙΩΣΝΥ…ν»κ―–ΨΩΘΚ¥”Ήν≥θΉΖ«σΒγ―Ι≤®–Έ’ΐœ“Θ§ΒΫΒγΝς≤®–Έ’ΐœ“Θ§‘ΌΒΫ¥≈Ά®ΒΡ’ΐœ“Θ§PWMΩΊ÷ΤΦΦ θ≤ΜΕœ¥¥–¬ΚΆΆξ…ΤΓΘ±ΨΈΡΥυ≤…”ΟΒΡΒγ―ΙΩ’Φδ ΗΝΩΘ®SVPWMΘ≠Space Vector PWMΘ©ΨΆ «“Μ÷÷”≈Μ·ΒΡPWMΖΫΖ®Θ§ΡήΟςœ‘Φθ–ΓΡφ±δΤς δ≥ωΒγΝςΒΡ–≥≤®≥…Ζ÷ΚΆΒγΜζΒΡ–≥≤®ΥπΚΡΘ§ΫΒΒΆ¬ωΕ·ΉΣΨΊΘ§”…”ΎΤδΩΊ÷ΤΦρΒΞΘ§ ΐΉ÷Μ· Βœ÷ΖΫ±ψΘ§ΡΩ«Α“―”–Χφ¥ζ¥ΪΆ≥SPWMΘ®SinusoidalPWMΘ©ΒΡ«ς ΤΓΘΈΔΜζΦΦ θΒΡ≤ΜΕœΖΔ’Ι ΙΒΟ ΐΉ÷Μ·PWM”–ΝΥ Βœ÷ΒΡΩ…ΡήΚΆΙψάΪΒΡ”Π”Ο«ΑΨΑΓΘ±ΨΈΡ≤…”ΟΟάΙζΒ¬÷ί“«ΤςΘ®TIΘ©ΙΪΥΨΉ®ΈΣΒγΜζΩΊ÷ΤΕχΆΤ≥ωΒΡ ΐΉ÷–≈Κ≈¥ΠάμΤςΘ®DPSΘ©TMS320C24xœΒΝ–÷–ΒΡTMS320F240 Βœ÷SVPWM±δΤΒΒςΥΌΓΘ±ΨΈΡΫι…ή”…TMS320F240 Βœ÷SVPWMΒΡΝΫ÷÷ΖΫΖ®ΓΘ“Μ÷÷”ΟTMS320F240ΒΡ≥ΘΙφ±»ΫœΙΠΡή Βœ÷ΓΘ≥ΤΈΣSWSVPWMΘ®»μΦΰSVPWMΘ©ΘΜΝμ“Μ÷÷”ΟTMS320F240ΙΧ”–ΒΡ…ζ≥…SVPWMΒΡ”≤ΦΰΒγ¬Ζ Βœ÷Θ§≥ΤΈΣHWSVWMΘ®”≤ΦΰSVPWMΘ©ΓΘ 2ΓΓSVPWMΒΡΜυ±Ψ‘≠άμΦΑΧΊΒψ Βγ―ΙΩ’Φδ ΗΝΩΖ®Θ®SVPWMΘ§≥Τ¥≈Ά®’ΐœ“PWMΘ© «¥”ΒγΕ·ΜζΒΡΫ«Ε»≥ωΖΔΘ§Ή≈―έ”Ύ ΙΒγΜζΜώΒΟΖυ÷ΒΚψΕ®ΒΡ‘≤–Έ¥≈≥ΓΘ§Φ¥’ΐœ“¥≈Ά®ΓΘΥϋ“‘»ΐœύΕ‘≥Τ’ΐœ“≤®Βγ―ΙΙ©Βγ ±ΫΜΝςΒγΕ·ΜζΒΡάμœκ‘≤–Έ¥≈Ά®ΙλΦΘΈΣΜυΉΦΘ§”ΟΡφ±δΤς≤ΜΆ§ΒΡΩΣΙΊΡΘ Ϋ≤ζ…ζΒΡ ΒΦ ¥≈Ά®»Ξ±ΤΫϋΜυΉΦ¥≈Ά®‘≤Θ§¥”Εχ¥οΒΫΫœΗΏΒΡΩΊ÷Τ–‘ΡήΓΘ»ΐœύΒγ―Ι‘¥–ΆΡφ±δ«≈ΒΡ…œ«≈±έΚΆœ¬«≈±έΩΣΙΊΉ¥Χ§ΜΞ≤ΙΘ§Ι Ω…”Ο3Ηω…œ«≈±έΒΡΙΠ¬ ΤςΦΰΒΡΩΣΙΊΉ¥Χ§Οη ωΡφ±δΤςΒΡΙΛΉςΉ¥Χ§Θ§Φ«ΙΠ¬ ΤςΦΰΩΣΆ®Ή¥Χ§ΈΣΓΑ1Γ±Θ§ΙΊΕœΉ¥Χ§ΈΣΓΑ0Γ±Θ§‘ρ…œ«≈±έΒΡΩΣΙΊΉ¥Χ§”–8÷÷ΉιΚœΘ§Ω…”Ο ΗΝΩΘέaΘ§bΘ§cΘίt±μ ΨΘ§Ζ÷±πΈΣΘέ0 0 0ΘίtΘ§Θέ0 0 1ΘίtΘ§Γ≠Θ§Θέ1 1 1ΘίtΓΘ 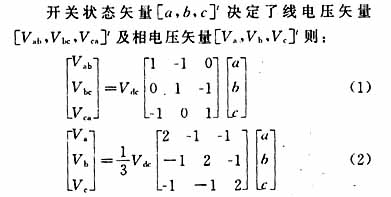 ΒΟΒΫœύΒγ―Ι ΗΝΩΚσΘ§‘Ό”Π”ΟΒγΜζΆ≥“Μάμ¬έΚΆabcΘ≠dqΉχ±ξΉΣΜΜΘΚ 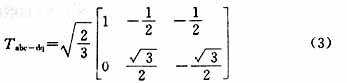 Ω…“‘ΫΪabcΉχ±ξΒΡ8÷÷ΩΣΙΊΉ¥Χ§ ΗΝΩΉΣΜΜΈΣdqΉχ±ξΒΡ8÷÷Βγ―Ι ΗΝΩΘ§Ζ÷±πΦ«ΈΣU0Θ§U60Θ§U120Θ§U180Θ§U240Θ§U300Θ§U000Θ§U111Θ§≥ΤΈΣΜυ±ΨΒγ―ΙΩ’Φδ ΗΝΩΘ§Τδ÷–U000Θ§U111ΈΣΝψ ΗΝΩΘ§»γΆΦ1Υυ ΨΓΘ 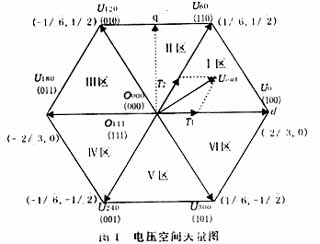 SVPWMΩΊ÷ΤΦΦ θΒΡΡΩ±ξΨΆ «“ΣΆ®ΙΐΩΊ÷ΤΩΣΙΊΉ¥Χ§ΉιΚœΘ§ΫΪΩ’ΦδΒγ―Ι ΗΝΩUoutΩΊ÷ΤΈΣΑ¥…ηΕ®ΒΡ≤Έ ΐΉς‘≤–Έ–ΐΉΣΓΘ‘ΎΡ≥Ηω ±ΩΧΘ§Uout–ΐΉΣ‘ΎΡ≥Ηω«χ”ρ÷–Θ§Ω…”…Ήι≥…’βΗω«χ”ρΒΡΝΫΗωΖ«Νψ ΗΝΩUxΚΆ  Ζ÷±πΑ¥Ε‘”ΠΒΡΉς”Ο ±ΦδT1ΓΔT2ΉιΚœΒΟΒΫΥυ“Σ«σΒΡUout δ≥ωΓΘ¥”“ΜΗωΩ’ΦδΒγ―Ι ΗΝΩ–ΐΉΣΒΫΝμ“ΜΗω ΗΝΩΒΡΙΐ≥Χ÷–Θ§”ΠΒ±Ήώ―≠ΙΠ¬ ΤςΦΰΒΡΩΣΙΊΉ¥Χ§±δΜ·Ήν–ΓΒΡ‘≠‘ρΘ§Φ¥”ΠΒ±÷Μ”–“ΜΗωΙΠ¬ ΤςΦΰΒΡΩΣΙΊΉ¥Χ§ΖΔ…ζ±δΜ·ΓΘΜυ”Ύ’β“Μ‘≠‘ρΘ§Ω…“‘―ΓΕ®ΗςΜυ±ΨΩ’ΦδΒγ―Ι ΗΝΩ÷°ΦδΒΡ–ΐΉΣΖΫœρΘ§œ»Ής”ΟΒΡUx±Μ≥ΤΈΣ÷ς ΗΝΩΘ§ΚσΉς”ΟΒΡ±Μ≥ΤΈΣΗ® ΗΝΩΓΘ”Ύ «UoutΩ…“‘±μ ΨΈΣ Ζ÷±πΑ¥Ε‘”ΠΒΡΉς”Ο ±ΦδT1ΓΔT2ΉιΚœΒΟΒΫΥυ“Σ«σΒΡUout δ≥ωΓΘ¥”“ΜΗωΩ’ΦδΒγ―Ι ΗΝΩ–ΐΉΣΒΫΝμ“ΜΗω ΗΝΩΒΡΙΐ≥Χ÷–Θ§”ΠΒ±Ήώ―≠ΙΠ¬ ΤςΦΰΒΡΩΣΙΊΉ¥Χ§±δΜ·Ήν–ΓΒΡ‘≠‘ρΘ§Φ¥”ΠΒ±÷Μ”–“ΜΗωΙΠ¬ ΤςΦΰΒΡΩΣΙΊΉ¥Χ§ΖΔ…ζ±δΜ·ΓΘΜυ”Ύ’β“Μ‘≠‘ρΘ§Ω…“‘―ΓΕ®ΗςΜυ±ΨΩ’ΦδΒγ―Ι ΗΝΩ÷°ΦδΒΡ–ΐΉΣΖΫœρΘ§œ»Ής”ΟΒΡUx±Μ≥ΤΈΣ÷ς ΗΝΩΘ§ΚσΉς”ΟΒΡ±Μ≥ΤΈΣΗ® ΗΝΩΓΘ”Ύ «UoutΩ…“‘±μ ΨΈΣ ”…”ΎT1ΓΔT2÷°ΚΆ–Γ”ΎTP÷°ΚΆ–Γ”ΎTPΘ®‘Ί≤®÷ήΤΎΘ©Θ§–η“Σ”ΟΝψ ΗΝΩU0 0 0ΜρU1 1 1≤ε»κΘ§≤ε»κ ±ΦδΈΣT0Θ§T1ΘΪT2ΘΪT0ΘΫTPΓΘΝψ ΗΝΩΕ‘UoutΒΡ¥σ–ΓΈό”ΑœλΘ§ΫωΕ‘…ηΕ®ΒΡΤΒ¬ ΤπΒΫ≤Ι≥ΞΉς”ΟΓΘ‘ΎΚήΗΏΒΡΩΣΙΊΤΒ¬ œ¬Θ§ΟΩΗωΉΣΜΜ÷ήΤΎ÷–UoutΩ…“‘Ω¥≥… «≥Θ ΐΘ§”……œ ΫΩ…–¥≥…ΘΚ  ”ΟΗΟ ΫΩ…“‘‘ΎdqΤΫΟφ÷–Θ§Ζ÷±π«σ≥ωT1Θ§T2ΓΘ Βγ―ΙΩ’Φδ ΗΝΩUoutΒΡ¥σ–Γ¥ζ±μ»ΐœύΒγΜζœΏΒγ―ΙΒΡ”––ß÷ΒΘ§ΤδΤΒ¬ “≤ «»ΐœύΒγΜζΒΡΤΒ¬ Θ§ΩΊ÷ΤUoutΒΡ¥σ–ΓΓΔ–ΐΉΣΥΌΕ»ΚΆΖΫœρΨΆΡή Βœ÷±δΤΒΒςΥΌΓΘΆΦ1Υυ Ψ”…Μυ±ΨΒγ―ΙΩ’Φδ ΗΝΩΉι≥…ΒΡΝυ±Ώ–ΈΒΡΡΎ«–‘≤ «UoutΥυΡή¥οΒΫΉν¥σΙλΦΘΘ§Υυ“‘UoutΒΡΉν¥σ÷ΒΈΣ  œύ”ΠΒΡΒγΜζΒΡœΏΒγ―ΙΚΆœύΒγ―ΙΈΣΚΆVdcΘ· œύ”ΠΒΡΒγΜζΒΡœΏΒγ―ΙΚΆœύΒγ―ΙΈΣΚΆVdcΘ· Θ§’β «Τ’Ά®SPWMΉν¥σ÷ΒΒΡ Θ§’β «Τ’Ά®SPWMΉν¥σ÷ΒΒΡ ±ΕΘ§“ρ¥ΥSVPWMΒΡ÷±ΝςΒγ―Ιάϊ”Ο¬ “≤ «ΉνΗΏΒΡΓΘ ±ΕΘ§“ρ¥ΥSVPWMΒΡ÷±ΝςΒγ―Ιάϊ”Ο¬ “≤ «ΉνΗΏΒΡΓΘ3ΓΓΜυ”ΎTMS320F240…ζ≥…SVPWM TMS320F24x «ΟάΙζTIΙΪΥΨ–¬ΩΣΖΔΒΡΉ®Ο≈”Ο”ΎΒγΜζΩΊ÷ΤΒΡDSP–ΨΤ§Θ§≥ΐΝΥDSPΥυΙΧ”–ΒΡΗΏΥΌΦΤΥψΧΊ–‘Θ®50nsΒΡ÷ΗΝν÷ήΤΎΘ©ΓΔ”≤Φΰ≥ΥΖ®Τς“‘ΆβΘ§ΜΙΡΎ≤ΩΦ·≥…ΝΥ»ΐœύPWM≤®–ΈΖΔ…ζΤςΘ§ΝΫ’ΏΒΡΫαΚœΘ§ ΙΈ“Ο«Άξ»ΪΡήΆ®Ιΐ Β ±ΦΤΥψά¥≤ζ…ζ»Έ“βΤΒ¬ ΒΡSVPWM≤®ΓΘ TMS320C24xœΒΝ–≤ζΤΖΈΣΒγΜζΩΊ÷Τ…ηΦΤΝΥΉ®Ο≈ΒΡPWM…ζ≥…Βγ¬ΖΘ§»γΆΦ2Υυ ΨΓΘ ¥”Τ§ΡΎ…ζ≥…PWMΒΡ”≤ΦΰΫαΙΙΆΦ2÷–Ω…“‘Ω¥ΒΫPWM…ζ≥…”…ΧΊΕ®ΒΡΦΡ¥φΤςΖ÷±πΩΊ÷ΤΘΚ 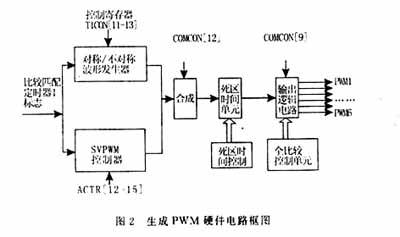 Θ®1Θ©COMCONΘέ12ΘίΩΊ÷ΤPWM δ≥ω «≥ΘΙφ±»ΫœΩΊ÷ΤPWMΖΫ ΫΘ®SWSVPWMΘ©Θ§ΜΙ «”≤ΦΰSVPWMΖΫ ΫΘ®HWSVPWMΘ©ΓΘ Θ®2Θ©ACTRΘέ12Θ≠15Θί÷– «Β±«Α ΗΝΩΘ§ΗυΨίUoutΒΡΈΜ÷Ο–¥»κœύ”ΠΒΡ÷ΒΘ§≤…”ΟHWSVPWM ± Ι”ΟΓΘ Θ®3Θ©T1CONΘέ11Θ≠13ΘίΩΊ÷Τ…ζ≥…Ε‘≥ΤΜρ≤ΜΕ‘≥ΤΒΡPWM≤®–ΈΘ§Υά«χ ±Φδ…η÷ΟDBTCONΘ§‘Ύ ±÷”ΈΣ50ns ±Θ§…η÷ΟΒΡΥά«χ ±ΦδΖΕΈß «0ΓΪ102Θ°4ΠΧsΓΘ Θ®4Θ©COMCONΩΊ÷ΤPWM δ≥ωΜρΗΏΉηΧ§ δ≥ωΘ§Ω…”Ο”ΎœΒΆ≥≥ωœ÷Ι ’œ ±ΦΑ ±±ΘΜΛΓΘ Θ®5Θ©CMPRxΘ®xΘΫ1Θ§2Θ§3Θ©3Ηω±»ΫœΦΡ¥φΤςΖ÷±πΕ‘”ΠΚΈ ±ΩΣΆ®aΓΔbΓΔc»ΐœύΘ§Τδ÷ΒΒΡ¥σ–Γ”…÷ςΓΔΗ® ΗΝΩΚΆΝψ ΗΝΩΒΡΉς”Ο ±ΦδΨωΕ®Θ§≤…”ΟSWSVPWM ± Ι”ΟΓΘ 3Θ°1ΓΓSWSVPWM…ζ≥…ΖΫΖ® ≤…”Ο»μΦΰ…ζ≥…SVPWMΒΡΙΐ≥Χ «Θ§Β±Ε® ±ΤςΒΡΦΤ ΐΤςάέΦ”ΒΫΒ»”ΎCMPRxΘΫ1Θ§2Θ§3Θ©ΒΡ÷Β ±Θ§ΨΆΜαΗΡ±δΩ’Φδ ΗΝΩΕ‘”ΠΒΡΩΊ÷Τ–≈Κ≈ δ≥ωΓΘάΐ»γ‘ΎCMPR1÷––¥»κ0Θ°25T0Θ§CMPR2÷––¥»κ0Θ°25T0ΘΪ0Θ°5T1Θ§CMPR3÷––¥»κ0Θ°25T0ΘΪ0Θ°5T1ΘΪ0Θ°5T2Θ§Ε® ±ΤςΒΡΦΤ ΐΤς÷Β“Μ“Μ”κCMPRxœύΤΞ≈δΘ§ΨΆΜα δ≥ωΆΦ3aΥυ ΨΒΡPWM≤®–ΈΓΘ“ρ¥ΥΘ§…ζ≥…SVPWMΒΡ≥Χ–ρΓΣΓΣΕ® ±Τς÷–ΕœΉ”≥Χ–ρ“ΣΆξ≥…ΒΡ»ΈΈώ“―Ψ≠Ζ«≥ΘΟς»ΖΝΥΓΘ‘Ύ÷ς≥Χ–ρ÷–ΗυΨίΩΊ÷Τ≤Ώ¬‘ΦΤΥψ≥ω–η“ΣΒΡΤΒ¬ Θ§Β»¥ΐ÷–ΕœΒΡ≤ζ…ζΓΘ‘ΎΕ® ±Τς÷–ΕœΉ”≥Χ–ρ÷–Θ§ΗυΨί¥Υ ±ΒΡfΚΆUoutΒΡΒ±«ΑΈΜ÷Ο»ΖΕ®≥ωœ¬“ΜΗω‘Ί≤®÷ήΤΎ÷–UoutΒΡΈΜ÷ΟΘ§»ΖΕ®÷ς ΗΝΩΚΆΗ® ΗΝΩΘ§≤ΔΦΤΥψ≥ωΥϋΟ«Ζ÷±πΉς≥ωΒΡ ±ΦδT1ΓΔT2Θ§ΒΟΒΫΖΔ…ζ«χ≈δΒΡ ±Φδ÷ΒΘ§–¥»κΒΫCMPRx÷–ΓΘ»γΆΦ3Υυ ΨΘ§Δώ«χ÷ς ΗΝΩ «U0Θ§Η® ΗΝΩ «UΓά60Θ§Δρ«χ÷ς ΗΝΩ «U120Θ§Η® ΗΝΩ «U60Θ§ΤδΥϋ«χ”ράύΆΤΓΘ 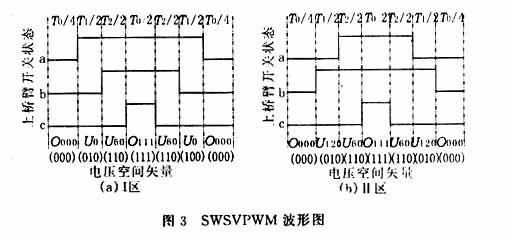 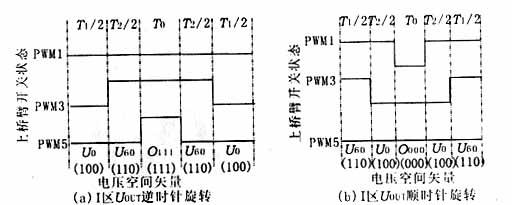  3Θ°2ΓΓHWSVPWM…ζ≥…ΖΫΖ® ‘ΎΟΩ“ΜΗωPWM÷ήΤΎ÷–Θ§ΫΪΆξ≥…Ε·ΉςΘΚ÷ήΤΎ“ΜΩΣ ΦΘ§ΨΆΗυΨίACTRΘέ14Θ≠12Θί÷–Ε®“εΒΡ ΗΝΩ…η÷ΟPWM δ≥ωΘΜ‘Ύœρ…œΦ« ΐΙΐ≥Χ÷–Θ§‘Ύ0Θ°5T1 ±ΩΧΖΔ…ζΒΎ“Μ¥Έ±»ΫœΤΞ≈δΘ®ΦΤ ΐΤς÷–÷Β”κCMPR1÷–÷ΒœύΒ»Θ©Θ§ΗυΨίACTRΘέ15ΘίΘ®0±μ ΨΡφ ±’κ–ΐΉΣΘ§1±μ ΨΥ≥ ±’κ–ΐΉΣΘ©Ε®“εΒΡ–ΐΉΣΖΫœρΘ§ΫΪPWM δ≥ωΉΣΜΜ≥…Η® ΗΝΩΘ§‘Ύ0Θ°5T1ΘΪ0Θ°5T2 ±ΩΧΘ§ΖΔ…ζΒΎΕΰ¥Έ±»ΫœΤΞ≈δ ±Θ®ΦΤ ΐΤς÷–÷Β”κCMPR2÷–÷ΒœύΒ»Θ©Θ§ΫΪPWM δ≥ωΉΣΜΜ≥…ΝΫ÷÷Νψ ΗΝΩ÷–ΒΡ“Μ÷÷ΘΜ‘Ύœρœ¬Φ« ΐΙΐ≥Χ÷–Θ§”κ«ΑΑκ÷ήΕ‘≥Τ δ≥ωΓΘΆΦ4Υυ Ψ «Δώ«χΚΆΔρ«χΒΡSVPWM≤®–ΈΆΦΘ§ΤδΥϋ«χ”ράύΆΤΓΘ 3Θ°3ΓΓSWSVPWMΚΆHWSVPWMΒΡ±»Ϋœ Ά®ΙΐΖ÷ΈωΩ…“‘Ω¥≥ωΘ§‘ΎΟΩΗωPWM÷ήΤΎΘ§SWSVPWM≤®–Έ“‘Νψ ΗΝΩU000ΩΣ ΦΚΆΫα χΘ§ΟΩΗωΡφ±δ«≈±έΉ¥Χ§ΨυΗΡ±δΘ§Υυ“‘Φ”»κΥά«χΚσ»ΐœύΒγ―Ι»‘»ΜΤΫΚβΘ§≤Δ≤Μ”ΑœλΡφ±δΤςœΏΒγ―ΙΘΜΕχHWSVPWM≤®–Έ «“‘ACTRΘέ14Θ≠12Θί÷–…η÷ΟΒΡ ΗΝΩΩΣ ΦΒΡΘ§≤Δ“‘ΥϋΫα χΘ§”–“ΜΗω«≈±έΉ¥Χ§ Φ÷’≤ΜΗΡ±δΘ§ΩΣΙΊ¥Έ ΐΦθ…ΌΝΥΘ§¥”ΕχΦθ…ΌΝΥΩΣΙΊΥπΚΡΘ§Υά«χ÷Μ”ΑœλΝΫΗω«≈±έΘ§Υυ“‘“ΐΤπœΏΒγ―Ι≤®–Έ–≥≤®Ζ÷ΝΩΘ§Β±ΩΣΙΊΤΒ¬ ΫœΗΏΘ®»γ20kHzΘ©ΓΔΥά«χ ±ΦδΫœ–Γ ±Θ§–≥≤®Ζ÷ΝΩΫœ–ΓΓΘΝμΆβHWSVPWMΦΤΥψΝΩ…ΌΘ§’Φ”ΟCPU ±Φδ…ΌΓΘ±μ1 «HWSVPWMΚΆSWSVPWMΒΡ±»ΫœΓΘ  4ΓΓ Β―ιΖ÷Έω άϊ”ΟTMS320F240–ΨΤ§Θ§Φ”…œ±Ί“ΣΒΡΆβΈßΒγ¬ΖΘ§ΙΙ≥…Ήν–ΓDSPœΒΆ≥ΓΘ÷«ΡήΙΠ¬ ΡΘΩι≤…”ΟΝΥΈςΟ≈Ή”ΒΡP221Θ§ΉνΗΏΩΣΙΊΤΒ¬ Ω…ΗΏ¥ο20kHzΘ§Υά«χ ±Φδ÷Μ”–2ΠΧsΘ§‘ΌΦ”…œΫχœΏ¬Υ≤®ΓΔ’ϊΝςΒγ¬ΖΘ§ΨΆΩ…“‘Ήω≥…“ΜΗωΦρΒΞ Β”ΟΒΡ±δΤΒΒςΥΌœΒΆ≥ΓΘ Β―ιΒγΜζ1Χ®ΈΣ750W»ΐœύ σΝΐΒγΕ·ΜζΘ§1Χ®100W»ΐœύ»ΤœΏ ΫΒγΕ·ΜζΘ§ΗΚ‘ΊΈΣ1Χ®180W≤Δάχ Ϋ÷±ΝςΖΔΒγΜζ¥χΜ§œΏ Ϋ±δΉηΤςΓΘ Β―ι≤…”ΟSWSVPWMΖΫΖ®Θ§≤Δ”κΤ’Ά®SPWMΖΫΖ®ΉωΝΥ±»ΫœΓΘ Β―ιΫαΙϊ»γΆΦ5ΓΔ6ΓΔ7Υυ ΨΘ§¥” Β―ιΙέ≤λΒΫΒΡ δ≥ωΒγ―Ι≤®–ΈΘ§ΒγΝς≤®–Έ’ΐœ“–‘ΚΟΘΜΆ®ΙΐFFT±δΜΜΘ§ΖΔœ÷SVPWMΒΡ–≥≤®œϊ≥ΐ–ßΙϊΟςœ‘Θ§”»Τδ6kΓά1¥Έ–≥≤®‘Ύ0ΓΪ1Θ°22kHzΖΕΈßΡΎΜυ±Ψ…œΕΦ±Μœϊ≥ΐΘ§Τδ–≥≤®Ζυ÷ΒΨυ±»Μυ≤®Ζυ÷Β–Γ30dB“‘…œΓΘ 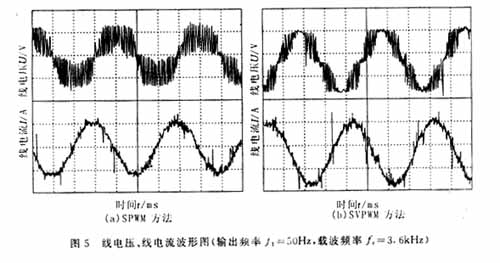 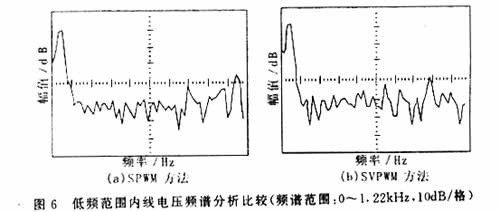 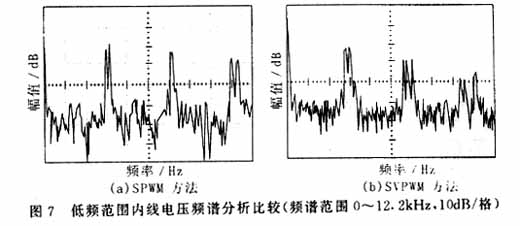 5ΓΓΫαΓΓ¬έ ±ΨΈΡ―–ΨΩΝΥ”ΟDSP–ΨΤ§TMS320F240 Βœ÷SVPWMΒΡΖΫΖ®ΓΘΨ≠ΙΐΖ÷ΈωΚΆ Β―ιΘ§ΫαΙϊ±μΟςΘΚ Θ®1Θ©SVPWM–≥≤®”≈Μ·≥ΧΕ»ΗΏΘ§œϊ≥ΐ–≥≤®–ßΙϊ±»SPWM“ΣΚΟΘ§ Βœ÷»ί“ΉΘ§≤Δ«“Ω…ΡήΧαΗΏΒγ―Ιάϊ”Ο¬ ΓΘ Θ®2Θ©SVPWM±»Ϋœ Κœ”Ύ ΐΉ÷Μ·ΩΊ÷ΤœΒΆ≥Θ§“‘ΈΔΩΊ÷ΤΤςΈΣΚΥ–ΡΒΡ ΐΉ÷Μ·ΩΊ÷ΤœΒΆ≥ «ΖΔ’Ι«ς ΤΘ§Υυ“‘SVPWM”Π «”≈œ»ΒΡ―Γ‘ώΓΘ Θ®3Θ©“‘TIΙΪΥΨΒΡTMS320F240ΈΣΚΥ–ΡΘ§ΙΙ≥…»Ϊ ΐΉ÷ΩΊ÷ΤœΒΆ≥Θ§Ω…“‘“‘ΝΫ÷÷ΖΫ Ϋ≤ζ…ζSVPWMΘ§‘Ύ“ΜΑψΒΡ÷––ΓΙΠ¬ ±δΤΒΒςΥΌœΒΆ≥÷–Θ§≤…”ΟΗΟ–ΨΤ§ Βœ÷SVPWMΩΊ÷ΤΦΦ θ «Ζ«≥Θ ΚœΒΡΓΘ |


Άχ”―Τά¬έ