
水下声学传感器网络无线多点通信系统研究
发布时间:2010-11-18 11:23
发布者:eetech
|
水下声学传感网络的一个重要用途是对水下传感器节点所覆盖的区域进行中长期的水下预警、目标检测、海洋水文环境要素监测等;同时,在未来多基地和舷外分布式传感器系统构成的庞大的反潜战网络中,水下数据通信是关键,而水下传感网承担着探测、数据通信的重要使命。所谓的水下无线传感网就是在一定的水下区域内,通过各种传感器节点获取水下信息,并对水下节点进行声学通信和组网,最终通过特定的节点,重新以无线电和有线的形式把在覆盖区域中所获取的信息纳入岸上的常规网络,并发送给观察者的水下子网。 由于水声信道的传输条件十分恶劣,特别是浅海水声信道,信道的带宽有限,取决于距离和频率,在这种有限的带宽内,声信号受强环境噪声,时变多径的影响,可能会导致严重的码间干扰(ISI)、大的多普勒频移扩展及长的传输时延。另外,无线电磁波和光波在水中的衰减非常大,无法实现远程传输。所以,在设计水声传感网时可以借鉴无线电组网技术,但是还要考虑水声信道的特点。 1 水下无线多点通信系统 1.1 系统的总体构架 基于水声信道的特点,同时考虑到频域上相邻点的间隔必须大于信道的相干带宽,所以采用FSK调制方式的跳频通信来实现。与陆地上的无线传感网络结构一样,水声传感网的拓扑结构可分为两大类:一种是小规模网络中采用典型的星型结构;另一种,大规模、多节点、分散密集的环境中,组建的分布式对等网络拓扑结构。 该设计实现的是小规模网络,采用星型结构,由一台PC机,一个主节点、多个分节点组成网络系统。一台和Internet网络连接的PC机是网络的监控中心,由主节点来广播信息实现数据传输与命令控制,终端设备直接受控于主节点,构建的水下无线传感网络,系统如图1所示。 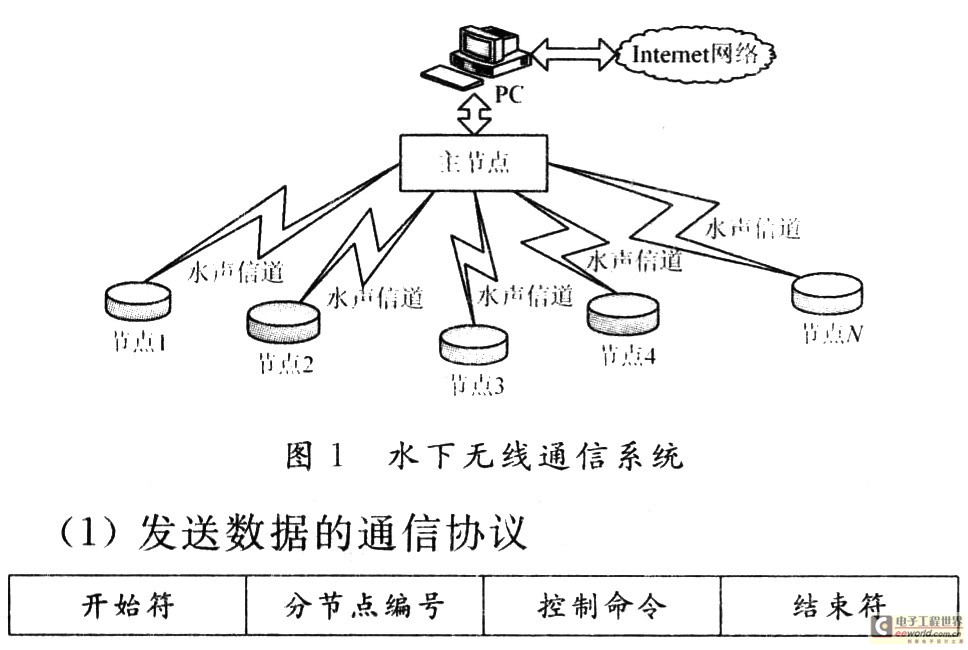 1.2 水下无线多点通信系统的通信协议 为了水下无线传感网络能稳定、无误码地完成命令发送和数据传输,也需要通信协议来保证其可靠性。结合水下无线传感网的需求,在此分别定义PC机到节点下行的发送数据通信协议,节点到PC机的上行接收数据通信协议两种不同的通信协议。 开始符 用“%”的ASCII码表示数据帧头。 从机编号 用0~99表示命令是要控制第几个分节点。0编号作为广播式设定,即如果是0编号,则水面中继器向各水声通信从机群发送控制信息。 控制命令 设定从节点需要处理的动作类型编号,控制指令的编号对应水下无线传感网分节点采取不同的控制操作。 结束符 用“MYM”的ASCII码表示数据帧尾。 (2)接收数据的通信协议  开始符 采用“%”的ASCII码表示数据帧头。 从机编号 当前回送的数据来自水下无线传感网的分节点编号。 数据类型 表示所传输的数据代表的含义。 数据内容 具体监测到的数据。 结束符 采用“MYM”的ASCII码占表示数据帧尾。 2 通信节点的系统设计 在水下无线传感网络里有两种设备:主节点和分节点。主节点主要负责各项监测任务的下达和数据等反馈信息的简单聚合与处理,是其余各节点与主控制PC机之间连接沟通的桥梁;分节点主要负责搜集传感器或者接口设备的测量数据,并直接向主节点反馈响应信号或数据。PC机和主节点之间的通信是通过RS 232实现的,而主节点和各节点之间的通信是通过水声换能器实现。 2.1 系统硬件结构 系统硬件结构如图2所示。 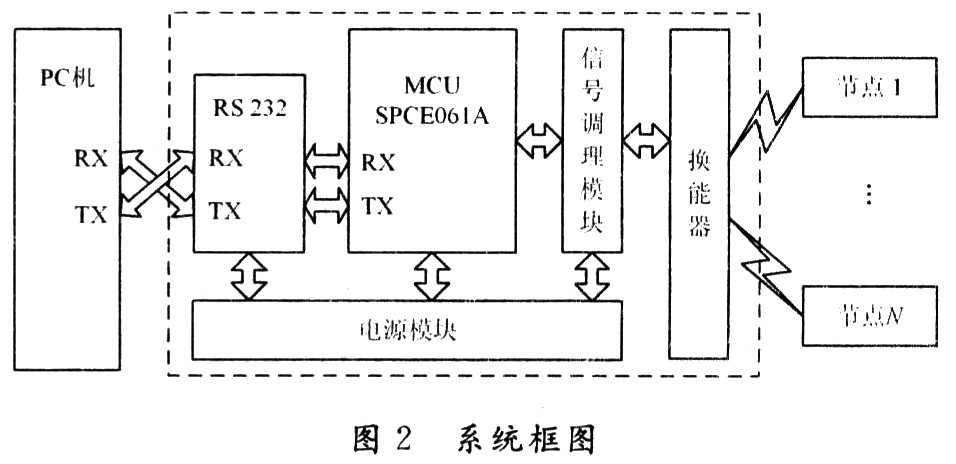 从图2可以看出,上位机控制系统通过主节点完成对无线传感网络的控制。系统控制核心为凌阳SPCE061A微处理器。它是凌阳科技推出的一款16位结构的微控制器。其功耗小,系统处于备用状态(睡眠状态)时的耗电仅为2μA/3.6 V;内置2 KWorldSRAM和32 KWord的FLASH;2个16位可编程定时器/计数器;2个10位数/模转换(DAC)输出通道;2个16位通用可编程输入/输出端口IOA和 IOB;丰富的中断资源:定时器A/B中断、时基中断、2个外部中断以及触键唤醒中断;7通道1O位电压模/数转换器(ADC)和单通道声音模/数转换器;通用异步串行输入/输出接口UART;可通过锁相环PLL振荡器选择系统时钟信号;低电压复位功能和低电压检测功能;WatchDog功能等。与其他单片机相比,SPCE061A是一款资源丰富、功能强大、集成度高的微控制器,采用此款单片机作为该系统的微控制器具有较高的性价比。 2.2 软件工作流程 主节点初始化后,系统常态处于等待接收PC机发送已准备好的信息或其他监控命令,收到数据后调用发送程序把收到的信息加上同步头向相应的分节点发送。其软件流程如图3所示。  在收到PC的信息后,MCU首先将信息存储,当所有的数据都接收完以后,将数据打包并按跳频图案发送,在经过信号调理模块的处理之后最后通过换能器将信号发送出去。 2.3 节点电源系统 系统中用到了MCU、运算放大器和多种IC电路,因此需要5路稳压电源。电压幅度的跨度从直流-12~12 V.输出给各路负载的电流参差不齐,所以电源系统的设计对于节点稳定工作起着重要的作用。在这里为了实现单电源为系统供电,所以要实现电压的转换。实现电压转换功能的电路有两大类,一类是开关型稳压电路,它利用自激励或他激励方法产生高频开关电流,用非线性储能元件(如电感)再次转换成直流,这类转换可以分为升压型的、降压型的和隔离型的。早先是用分立元件实现DC/DC电压转换,目前已经有各种性能较好的专用IC来完成电路的控制和转换功能。另一类是线性稳压电路,现在已经发展到LDo(LowDrop Outregulator),LDO是一种低压差线性稳压器。线性稳压器使用晶体管或FET运行在其线性区域内,从输人电压中减去超额部分的电压,其压差由晶体管的管压降分担,从而产生经过调节后的额定输出电压。根据以上所述要实现单电源供电不紧需要升降电压还需要实现正负电压的转换,如果电源转换全部采用开关电源实现,将得到很高的效率,但也使高频电磁波的干扰增大。同时考虑到系统对电流的要求,在这里采用开关电源和线性稳压电源相混合的结构。其中小电流负载的转换采用线性稳压和LDO实现,正负电压和大电流负载的转换采用开关电源实现。电源系统框图如图4所示。 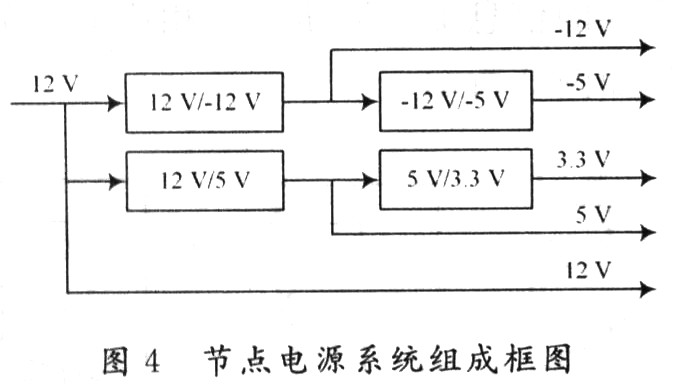 3 系统管理程序设计 PC机和主节点之间的通信是通过RS 232串口实现的,通信波特率9 600 b/s,为了能够同计算机接口和终端的TTL器件链接,必需进行电平和逻辑关系的变换,采用MAX 232芯片就可以实现TTL到EIA双向电平转换。PC机主控系统实现对主节点的控制和传感信息的获取、显示。所以主控系统界面应当包括节点的控制面板、显示窗口两大部分,如图5所示。  控制面板中给出了要发送信息的节点号的选择,在输入节点号之后,按下发送按钮主控系统就会通过主节点向相应的节点发送信息。节点在收到信息后执行相应的指令并反馈信息给PC。 4 结 语 这里介绍以高性能16位单片机为控制核心,采用跳频通信的方式实现水下多点通信系统。该系统具有传输数据可靠、界面友好、可扩展性强。在水池试验中取得了满意的效果。 |



网友评论