
单片机控制的小型发电机逆变电源的研制
发布时间:2010-11-17 16:24
发布者:designer
|
中频汽油发电机作为一项重要的电能源,在需要备用电源和流动性作业的场合具有重要作用。其特别适用于野外、矿山施工作业,企事业单位备用电源以及灾后小功率临时用电,具有简单可靠,便于维修等特点。由于汽油发电机输出的是频率和电压都与市电不同的三相交流电,电压和频率的值比较高,不符合大多数用电设备的使用要求,而且输出电压随负载的变化波动较大,因此需配备自动电压调节器(AVR)使输出电压和频率在负载变化时达到稳定。传统的模拟控制方法输出电压质量差,耗能大。而随着计算机技术和电力电子控制技术的发展,数字化、智能化控制已成为逆变电源发展的必然。与传统的控制方法相比,微机控制的中小型汽油发电机逆变电源设计灵活,系统可靠,能实现实时的监控和诊断。但目前的产品大多只有一种模式,即满载工作方式,不能实现转速随负载的变化而实时调节。主要原因是汽油发电机的精确数学模型在实际运行中较难得到,传统的基于线性系统的控制方法容易导致不良的动态过程或系统不稳定。 本设计采用非线性方法来解决这一问题,将模糊控制应用到控制系统中去。汽油发电机的油门采用步进电动机进行控制,整个系统分为节油模式和满载模式,在负载频繁变动的场合采用满载模式,其他场合采用节油模式,根据负载的变化自动调节发电机油门,整个系统通过硬件和软件上的灵活设计保证其在节油降耗的基础上具有良好的稳定性和动态性能。 基本工作原理 汽油发电机常被作为移动式的独立电源来使用,主要由汽油机、同步交流发电机和控制器组成。设计中所用汽油机发出的三相交流电频率为350~640Hz,电压为300~550V,通过三相整流桥变成直流高电压,然后经过降压环节(降压变换器)降至350V左右,最后通过逆变环节和LC滤波器变换成220V/50Hz的交流电供负载使用。为了降低主电路的开关损耗,逆变器采用单极倍频电压型SPWM软开关DC/AC变换电路。 控制电路以单片机为中心,为使输出电压在负载变化时能够稳定,首先在降压环节中引入了传统的PID控制算法,将降压环节输出电压稳定在350V,以使逆变器输出稳定的220V/50Hz的交流电。当降压环节不能使输出电压达到稳定时,则根据反馈电压与给定电压的偏差及偏差的变化率作为模糊控制器的输入量进行调节,得到合适的油门开度,即可实现输出电压的稳定和良好的动态性能。 控制系统的组成 整个系统用PIC16F877作为主控芯片,它在保持高速度和低价格的前提下集成了看门狗定时器、FLASH程序存储器、10位A/D转换接口、两路PWM输出等电路,所以在进行开发设计时,外部电路比较简洁,能较好的满足要求。 控制器方案主要包括硬件和软件两部分。硬件设计主要由驱动模块、油门控制电路、逆变桥专用SPWM控制器、SG3525脉宽调制电路、电压电流检测电路等组成。设计选用既有隔离功能又具备驱动能力的TLP250作为驱动模块;逆变桥控制器采用PIC16F873进行开发,直接利用单片机自身提供的PWM输出接口输出两路SPWM驱动脉冲;反馈信号的采样检测选用单片机内部分辨率高和抗干扰能力强的A/D进行转换;整个硬件设计方案简洁,可靠性较高。 系统的软件部分主要包括油门模糊控制程序,逆变控制器SPWM脉冲输出程序,主控芯片在过压过流情况下的中断保护程序以及与逆变控制器的通讯程序。其中,发电机油门的模糊控制程序是整个系统的难点和核心,如果控制量计算不合适非但不能达到节能降耗的目的,还将造成系统的振荡和输出电压不稳定。另外,汽油发电机属于独立电源,所以控制系统的供电需利用发电机模块绕组发出的13.5±0.5V的交流电变换而成。由于逆变电路需要几路相互独立的驱动电源,为了使电路简洁,本系统设计了有多路副边输出的反激式开关电源给控制系统供电。整个设计的原理框图如图1所示。 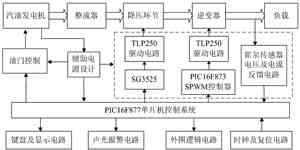 图1 系统主电路和控制电路框图 驱动电路和保护电路的设计 控制系统中降压环节和逆变器开关器件选用IGBT,根据IGBT的开关特性和对栅极驱动电路的要求,用TLP250设计的驱动电路如图2所示。PWM3为单片机发出的驱动信号,VCC为辅助电源的18V电平,G3和E3为IGBT的驱动信号,G3接IGBT的门极,E3接IGBT的源极。开通状态下的栅极驱动电压为13V,关断状态下的栅极驱动电压为-5V(稳压管反向偏置)。当G3与E3两端电压为13V时,IGBT导通,当其两端电压为-5V时,则强迫IGBT迅速关断。而当输出出现过电压时,电路将封闭TLP250的工作,从而实现对IGBT的保护。 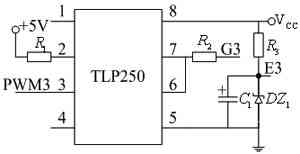 图2 IGBT驱动电路 为了使电源在恶劣环境及突发故障下能够安全可靠的工作,必须设计保护电路,比如防浪涌的软启动,防过压、欠压、过热、过流、短路等保护电路。本保护电路主要是完成系统的过流保护功能,它利用霍尔传感器检测电压电流信号,通过由LM324设计的滞回电压比较器封锁输出脉冲。 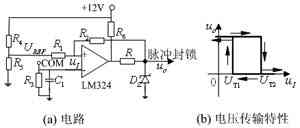 图3 过流保护电路 模糊控制器的设计 模糊控制的基本原理就是将控制器的输入量经过模糊化处理,按照一定的模糊语言规则进行推理,最后将推理得出的结果进行解模糊得到控制变量的精确输出值。如图4所示。 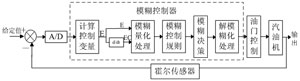 图4 模糊原理控制框图 模糊控制器的设计主要是实现模糊控制算法的软件设计,主要包括以下几个方面:确定模糊控制器的输入和输出变量,选择输入和输出变量的论域;变量的语言描述和赋值表的建立;设计模糊控制规则;确立模糊化和解模糊化方法,生成控制表。 1 控制器的输入和输出变量 从理论上讲,模糊控制系统所选用的模糊控制器维数越高,系统的控制精度也就越高。但维数选择太高,模糊控制规律过于复杂,基于模糊合成推理的控制算法的计算机实现也就更困难。根据本设计的特点采用二维模糊控制器,为了易于测量和控制,控制器的输入变量直接选用降压环节输出电压的偏差E和偏差的变化率EC,控制器的输出变量为汽油机的油门开度即步进电机的步进步数。 电压偏差的基本论域为[-60,60],偏差变化的基本论域为[-6,6],输出步进电动机步数的基本论域为[-32,32],步进电动机步数为负数表示电动机反转,油门开度变小。 电压偏差E,偏差的变化率EC和输出控制量Y所对应的语言变量模糊子集为{正大(PB),正中(PM),正小(PS),零(0),负小(NS),负中(NM),负大(NB)},所对应的离散模糊论域为{6,5,4,3,2,1,0,-1,-2,-3,-4,-5,-6},用αe和αC表示误差和误差变化的量化因子,用αu表示控制量的比例因子,则 αe=n1/|emax|=6/60=0.1,αC=n2/|eCmax|=6/6=1,αu=|umax|=32/6=5.33。 输入输出的隶属度函数通常有三角型、梯型和高斯型等几种形式。其中,高斯型隶属度函数是描述模糊子集比较合理的形式,但它的计算比较复杂,计算机实现困难。根据系统特点,本方案采用三角形隶属度函数,它的形状仅与直线斜率有关,适合于在线调整的自适应模糊控制系统。输入变量和输出变量的隶属度函数曲线分别如图5和图6所示。 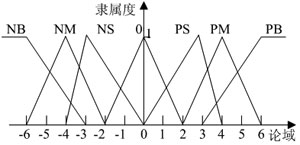 图5 E和EC的隶属度函数曲线 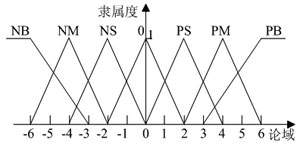 图6 Y的隶属度函数曲线 由于当输出电压误差较小时,仅靠降压环节的脉宽调整就能使电压稳定,所以在偏差较小时隶属度函数的形状要缓一些。输入输出变量的隶属度函数曲线是建立语言变量赋值表的依据,对于三角形的隶属度函数,赋值表中的隶属度可按以下公式计算: (1) 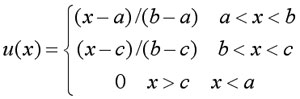 其中,a表示三角形左端对应的X轴的值,b为三角形顶端对应的X轴的值,c为三角形右端对应的X轴的值。表1为输出变量Y的语言变量赋值表,偏差和偏差变化率的语言变量赋值表格式和计算方法与此类似。 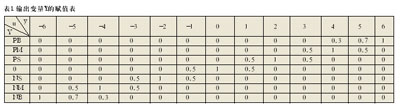 2 模糊控制规则的建立 本设计的模糊控制规则主要就是根据降压环节输出电压偏差和偏差的变化率确定汽油机油门开度的变化,原则就是当偏差较大时选择控制量以尽快消除误差,当偏差较小时,选择控制量防止超调,以系统稳定性为主,选用if E and EC then Y 的形式,可建立如下的控制规则表。 在建立模糊控制规则之后,我们可以计算每条规则的模糊关系Ri,这些模糊关系之间具有或的关系,因此描述整个控制系统总的模糊关系为R=R1∨R2∨R3……Rn。 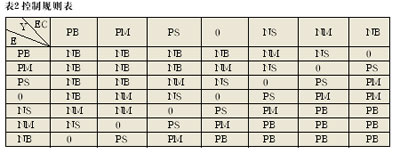 3 模糊控制查询表的生成 有了描述整个系统的控制规则的总模糊关系R后,接下来便是基于推理合成规则进行模糊推理,根据输出电压偏差和偏差变化率的赋值表求取控制量输出。由于模糊推理的结果是一个模糊集合,它反映的控制量输出语言变量属于其论域中各元素隶属度大小的一种组合,要想获得精确的输出量必须进行解模糊化处理即输出信息的模糊判决,方法通常包括最大隶属度法、中位数法、加权平均法等,本设计采用加权平均法,其算法公式为: (2)  其中,xi为离散论域中的元素,u(xi)为每个论域元素上的隶属度。计算所得的精确控制量再乘以比例因子,就得到实际的控制量。为了减小计算量,不必每次输出都进行模糊推理和模糊判决,我们可采用建立模糊查询表的办法,按照先前的步骤对E和EC离散论域中的元素分别进行模糊化,然后通过模糊推理和模糊判决得到对应的属于控制量离散论域的精确控制量Y,最后将所得结果制成模糊控制表,本系统模糊控制表如表3所示。  将模糊控制查询表保存到PIC16F877中,在实时控制中,计算机根据采样的量求得偏差和偏差的变化率,并对其量化得到元素EK和ECK,查表得到YK。由此可见,利用此模糊控制查询表,省去了大量模糊推理和模糊判决的时间,效率得到很大提高。  图7 满载时降压环节输出电压波形 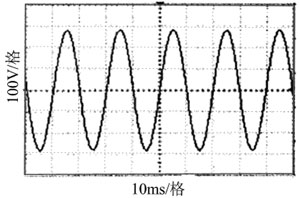 图8 满载时逆变器输出电压波形 逆变电源的特性测试 在实际运行试验中,需要根据系统的动态性能要求对模糊控制器进行动态的改进,比如模糊控制规则的简单调整,比例因子和量化因子的改变等。另外根据模糊控制不能消除静态误差的特点,本设计在降压环节加入了PID控制算法,逆变桥控制器采用固定的调制比形式,只要使降压环节的输出电压稳定,则负载两端就能输出稳定的220V/50HZ的正弦波。 采用以上方案设计了一台2kW的样机进行试验。图7和图8为逆变电源带2kW阻性负载时,降压环节和逆变器输出的电压波形。实践证明,本设计通过选用高性能的PIC单片机和在控制中加入模糊控制算法,避免了建立复杂的数学模型,实现了输出电压调节速度快,波动小的要求。整个方案外围电路简洁,系统可靠性高,是一款高性能的独立式逆变电源。 |



网友评论