
¥ΪΗ–ΤςΒΡ–≈Κ≈¬ΖΨΕΦΑΤδœύΙΊΧΊ–‘
ΖΔ≤Φ ±ΦδΘΚ2010-10-27 14:41
ΖΔ≤Φ’ΏΘΚtechshare
¥ΪΗ–Τς‘Ϋά¥‘ΫΕύΒΊ”Π”Ο”Ύ«Ε»κ ΫœΒΆ≥÷–ΓΘΥδ»Μ≥ΛΤΎ“‘ά¥ΙΛ“Β≤ζΤΖ“Μ÷±ΫΪΤδ”Ο”Ύ÷Τ‘λΩΊ÷ΤœΒΆ≥Θ§ΒΪœϊΖ―…η±Ηœ÷‘Ύ“≤ΩΣ Φ≤…”Ο¥ΪΗ–ΤςΓΘ÷Τ‘λ…ΧΟ«’ΐ‘ΎœϊΖ―≤ζΤΖ÷–Φ·≥…¥ΪΗ–ΤςΘ§“‘¥¥‘λ≥ωΗϋΚΟΒΡ”ΟΜßΧε―ιΘ§»γ‘Ύ ÷Μζ÷–‘ωΦ”Φ”ΥΌΕ»ΦΤΘ§“‘ΦΑ‘ΎΈΔ≤®¬·÷–Φ”»κ’τΤϊ¥ΪΗ–ΤςΒ»ΓΘ“‘«ΑΫω‘Ύ ΐΉ÷”ρ÷–ΙΛΉςΒΡœΒΆ≥…ηΦΤ’Ώœ÷‘ΎΖΔœ÷Θ§Ή‘ΦΚ±Ί–κ“Σ”κΡΘΡβ¥ΪΗ–Τς¥ρΫΜΒάΝΥΓΘ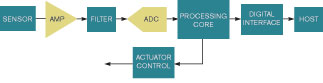 ΆΦ1Θ§“Μ÷Μ¥ΪΗ–ΤςΒΡΡΘΡβ–≈Κ≈¬ΖΨΕΩ…“‘Ζ÷ΈΣΦΗΦΕΘΚΖ≈¥σΓΔ¬Υ≤®ΚΆ ΐΉ÷Μ·ΓΘ ¥ΪΗ–ΤςΒΡΡΘΡβ–≈Κ≈±Ί–κΨ≠Ιΐ ΐΉ÷Μ·≤≈ΡήΙ©œΒΆ≥ Ι”ΟΘ§≤Δ«“–≈Κ≈“ΣΨ≠ΙΐΖ≈¥σΓΔ¬Υ≤®ΚΆ ΐΉ÷Μ·Θ®ΆΦ1Θ©ΓΘΟΩ“ΜΦΕΆ®≥ΘΕΦ…φΦΑ“Μ÷ΜΈß»ΤΉ≈“Μ–©Έό‘¥‘ΣΦΰΒΡΤςΦΰΘ§“‘’ΐ»ΖΒΊ Βœ÷“ΜΗω”Π”ΟΓΘ“ΜΒ©Ε‘–≈Κ≈ΉωΝΥ ΐΉ÷Μ·Θ§ΨΆΩ…“‘ΫΪΤδΥΆΗχΈΔ¥ΠάμΤς…œΒΡΩΊ÷ΤœΒΆ≥Θ§Μρ’ϊάμ ΐΨίΚσΆ®Ιΐ“ΜΗωΆ®–≈–≠“ιΥΆ÷Ν“Μ÷Μ÷ς¥ΠάμΤςΓΘ–≠“ιΩ…“‘ΗυΨί–η“Σ Ι”Ο¥ΪΗ–Τς ΐΨίΓΘ ΟΩΗω¥ΪΗ–Τς”–≤ΜΆ§ΒΡ δ≥ω–≈Κ≈ΚΆΖΕΈßΓΘ δ≥ωΒΡ–≈Κ≈Ω…“‘ «Βγ―ΙΓΔΒγΝςΓΔΒγΉηΓΔΒγ»ίΜρΤΒ¬ Θ§ΒΪΦΗΚθ≤Μ¥φ‘Ύ ≤Ο¥±ξΉΦΘ§÷Μ”–Ή®”ΟΒΡΙΛ“ΒœΒΆ≥‘Ύ Ι”ΟΥϋΟ«ΓΘΦ¥ ΙΆ§“Μ÷Τ‘λ…ΧΒΡάύΥΤ¥ΪΗ–Τς“≤Ω…“‘”–≤ΜΆ§ΒΡ δ≥ωΘ§Εχ’β–©≤ν“λΜαΗχœΒΆ≥…ηΦΤ’Ώ¥χά¥“Μ–©¬ιΖ≥ΓΘ…ηΦΤ’Ώ―Γ‘ώ¥ΪΗ–Τς ±±Ί–κ¬ζΉψœΒΆ≥ΒΡ–η«σΓΘ»ΜΕχΘ§»γΙϊ‘Ύ…ηΦΤΤΎΦδ’β÷÷–η«σ≥ωœ÷±δΜ·Θ§‘ρ¥ΪΗ–Τς“≤“ΣΉω≥ω–όΗΡΓΘΝμΆβΘ§“ΜΩν δ≥ω¬‘”–≤ΜΆ§ΒΡ–¬¥ΪΗ–Τς±Ί–κΕ‘Ζ≈¥σΦΕΚΆ¬Υ≤®ΦΕΉς≥ωΗΡΕ·ΓΘ ¥σΕύ ΐ¥ΪΗ–ΤςΕΦ δ≥ω“ΜΗωΒΆΒγΤΫΒΡΒγΝςΜρΒγ―Ι–≈Κ≈Θ§“ρ¥Υ“ΜΗωΦρΒΞΒΡΒγΉηΆχ¬γΨΆΡήΫΪ»ΈΚΈΒγΝς–≈Κ≈±δΈΣ“ΜΗωΒγ―ΙΓΘ±ΨΈΡΦρΒΞΟη ωΝΥ“Μ–©Η≈ΡνΚΆ‘ΣΦΰ―Γ‘ώΙΐ≥ΧΓΘ ΖυΕ» “Μ÷Μ¥ΪΗ–ΤςΒΡ δ≥ωΩ…“‘ΒΆ÷Ν ΐΚΝΖϋΘ§“≤Ω…“‘ΗΏ¥ο ΐΖϋΧΊΓΘΈΣΉωΒΫ’ΐ»ΖΒΡ ΐΉ÷Μ·Θ§Ε‘ADCά¥ΥΒ–≈Κ≈±Ί–κΉψΙΜ¥σΘ§≤≈Ρή”––ßΒΊΕΝ≥ωΓΘ¥σΕύ ΐ«ιΩωœ¬Θ§¥ΪΗ–Τς–≈Κ≈ΕΦ–η“ΣΖ≈¥σΓΘάΐ»γΘ§“ΜΗωΒδ–ΆΒΡK–Ά»»Βγ≈Φ δ≥ωΈΣ41ΠΧV/ΓψCΘ§»γΙϊΡψΒΡ…ηΦΤ–η“Σ1ΓψCΒΡΝΘΕ»Θ§ΨΆ–η“ΣΉωœύΒ±ΒΡΖ≈¥σΓΘ“ρ¥ΥΘ§±Ί–κΩΦ¬«ΒΫADCΒΡΖ÷±φ¬ Θ§“‘»Ζ±ΘΡήΫΪ–≈Κ≈Ζ≈¥σΒΫΡή¬ζΉψΥυ–ηΝΘΕ»ΓΘ Ε‘Ζ≈¥σΤςΒΡ―Γ‘ώ÷ς“Σ»ΓΨω”Ύ–η“ΣΒΡάύ–ΆΘ§άΐ»γ «“«±μΖ≈¥σΤςΓΔ≤νΖ÷Ζ≈¥σΤςΓΔ‘ΥΥψΖ≈¥σΤςΘ§ΜΙ «PGAΘ®Ω…±ύ≥Χ‘ω“φΖ≈¥σΤςΘ©ΓΘΝμΆβΜΙ±Ί–κ»ΖΕ®Ζ≈¥σΤς–η“ΣΒΡ‘ω“φ¥σ–ΓΓΘΖ≈¥σΤς÷ήΈßΒΡΒγΉηΆχ¬γΘ®¥χΖ¥άΓΘ©ΨωΕ®ΝΥΖ≈¥σΤςΒΡ‘ω“φΓΘάμœκ«ιΩωœ¬Θ§±ξΉΦΖ≈¥σΤςΒΡΉν¥σ‘ω“φ «ΈόœόΒΡΓΘΗχΤςΦΰΒΡ ΐΉ÷–≈Κ≈Ά®≥ΘΨΆ…ηΕ®ΝΥPGAΒΡ‘ω“φΓΘ’βΗω–≈Κ≈ΗΡ±δΝΥΡΎ≤ΩΒγΉηΆχ¬γΓΘ“Μ÷ΜPGAΒΡΉν¥σΩ…Ρή‘ω“φΈΣ¥ΪΆ≥Ζ≈¥σΤςΒΡ«ßΖ÷÷°“Μ÷ΝΕΰΖ÷÷°“ΜΘ§ΒΪ¥σΕύ ΐ«ιΩωœ¬’βΗω«χΦδ «Ω…“‘Ϋ” ήΒΡΓΘ Ε‘”ΎΖ≈¥σΤςΜΙ±Ί–κΩΦ¬«ΝμΆβ“ΜΗω÷Ί“ΣΙφΗώΘΚΤΪ“ΤΒγ―ΙΓΘΤΪ“ΤΒγ―Ι «“ΜΗω–≈Κ≈Ά®ΙΐΖ≈¥σΤς ±ΗΡ±δΒΡΒγ―ΙΝΩΓΘάΐ»γΘ§»γΙϊΫΪ“ΜΗω500 mV–≈Κ≈ΥΆΗχ“ΜΗωΒΞΈΜ‘ω“φΘ®Φ¥‘ω“φΈΣ1Θ©ΒΡΖ≈¥σΤςΘ§ΤΪ“ΤΒγ―ΙΈΣ10 mVΘ§‘ρΒΟΒΫΒΡ δ≥ωΨΆ «510 mVΓΘ»γΙϊ¥ΪΗ–ΤςΒΡ δ≥ωΖΕΈßΈΣ0÷Ν900 mVΘ§ΕχœΒΆ≥≤Μ–η“ΣΖ«≥ΘΨΪΟήΒΡ¥ΪΗ–ΤςΕΝ ΐΘ§Ρ«Ο¥’βΗωΤΪ“ΤΨΆΩ…“‘Κω¬‘≤ΜΦΤΓΘ»γΙϊ¥ΪΗ–ΤςΒΡΖΕΈßΈΣ450 mV÷Ν550 mVΘ§’βΗωΤΪ“ΤΩ…ΡήΨΆ≤ΜΩ…Ϋ” ήΝΥΓΘΤΪ“ΤΒγ―Ι‘Ϋ–ΓΘ§Ζ≈¥σΤςΨΆ‘ΫΙσΓΘΥυ”–Ζ≈¥σΤςΕΦ”–ΤΪ“ΤΘ§ΒΪΡψ–η“Σ÷ΣΒάœΒΆ≥ «ΖώΡή»ί»ΧΥϋΓΘΩ…“‘”ΟœύΙΊΥΪ≤…―υΖΫΖ®ά¥ΫΒΒΆΜρœϊ≥ΐΤΪ“ΤΒγ―ΙΓΘ ¬Υ≤® Υυ”–œΒΆ≥ΕΦΜα‘Ύ¥ΪΗ–Τς–≈Κ≈…œΒΰΦ”“Μ–©‘κ…υΓΘ‘κ…υά¥‘¥”–ΗςΗωΖΫΟφΘ§Αϋά®Βγ¬ΖΑε≤ΦΨ÷ΓΔ…δΤΒΓΔ»»‘ΣΦΰΘ§…θ÷Ν¥ΪΗ–ΤςΉ‘…μΓΘ–≈Κ≈‘κ…υΜα ΙADCΒΡΕΝ ΐ≤ΜΨΪ»ΖΚΆ≤ΜΈ»Ε®Θ§‘κ…υΒγΤΫ‘ΎΖ≈¥σΤς÷–ΜαΒΟΒΫ‘ω«ΩΘ§“ρΈΣΖ≈¥σΤςΡήΖ≈¥σ–≈Κ≈÷–ΒΡΈσ≤νΓΘ–≈Κ≈‘κ…υΩ…“‘Ζ÷ΈΣΒΆΤΒΓΔΗΏΤΒΜρΡ≥Ηω“―÷ΣΤΒ¬ ΓΘΆ®≥ΘΉν–η“ΣΫβΨωΒΡ «ΗΏΤΒ‘κ…υΈ ΧβΓΘ  ΆΦ2Θ§¥ΪΗ–ΤςΒΡ–≈Κ≈¬ΖΨΕ÷–Αϋά®Ζ≈¥σΤςΓΔ¬Υ≤®ΤςΚΆADCΓΘ¬Υ≤®ΤςΒΡ…ηΦΤ”Ο”Ύ»Ξ≥ΐ–≈Κ≈÷–ΒΡ‘κ…υΘ§œό÷Τ¥χΩμΓΘ ”ΟΈό‘¥ΡΘΡβ¬Υ≤®ΤςΓΔ¬Υ≤®ΤςICΚΆ ΐΉ÷¬Υ≤®ΤςΕΦΩ…“‘¬Υ≥ΐ‘κ…υΘ®ΆΦ2Θ©ΓΘΉν≥ΘΦϊΒΡΖΫΖ® «Έό‘¥¬Υ≤®Θ§’β“Σ”ΟΒγΉηΓΔΒγ»ίΚΆΒγΗ–Ϋ®ΝΔ“ΜΗωΈό‘¥Άχ¬γΓΘ≤ΜΙΐΘ§Ρψ±Ί–κ…ηΦΤΈό‘¥ΒΡ¬Υ≤®ΤςΘ§≤Δ«“ΈόΖ®ΦρΒΞΒΊΗΡ±δΥϋΟ«ΓΘ¬Υ≤®Τς…ηΦΤΒΡΗ¥‘”Ε»Ω…Ρή”κΡψΥυ–η¬Υ≤®ΤςΒ»ΦΕ“Μ―υ¥σΘΜ“ΜΗω“ΜΫΉChebyshev¬Υ≤®ΤςΒΡ…ηΦΤΙΛΉςΝΩ“Σ±»“ΜΗωΑΥΫΉBessel¬Υ≤®Τς–ΓΒΟΕύΓΘ“ρ¥ΥΡψ”Π»ΖΕ®–η“ΣΒΡ¬Υ≤®ΤςΫΉ ΐΘ§»ΜΚσ‘Ό―Γ‘ώΉ‘ΦΚ≤…”ΟΒΡ¬Υ≤®ΖΫΖ®ΓΘ Ρ≥–©IC‘ –μΡψ”Ο ΐΉ÷±ύ≥ΧΖΫΖ®Θ§»ΖΕ®–η“ΣΒΡ¬Υ≤®Τςάύ–ΆΓΘ’β–©IC”ΟΡΎ≤ΩΒΡΡΘΡβΒγ¬ΖΫ®ΝΔ¬Υ≤®ΤςΘ§≤ΔΩ…Ρή”–”κ÷°œύΙΊΒΡΤΪ“ΤΒγ―ΙΓΘΥϋΟ«“≤Ω…“‘»ΟΡψΫΪ¬Υ≤®≤Ϋ÷η“ΤΒΫADCΝΩΜ·ΒΡΚσΟφΓΘ ΐΉ÷¬Υ≤®Τς…ηΦΤΩ…“‘ΚήΗ¥‘”Θ§ΒΪ”–ΚήΕύΡήΑο÷ζΉω≥ωΗΏΫΉ¬Υ≤®ΤςΒΡΦρ±ψ…ηΦΤΓΘ ΐΉ÷¬Υ≤® «»Ξ≥ΐ‘κ…υΒΡ“ΜΗωάμœκΖΫ ΫΘ§ΒΪ «Θ§ΥϋΆ®≥Θ–η“ΣΚήΕύCPU÷ήΤΎΘ§‘ωΦ”ΝΥΙΠΚΡΓΘœΒΆ≥Ά®≥ΘΜα“ΐΤπΗΏΤΒ‘κ…υΘ§“ρ¥Υ–η“Σ≤…”ΟΒΆΆ®¬Υ≤®ΤςΓΘ’β÷÷¬Υ≤®ΤςΩ…ΥΞΦθΗΏ”ΎΥυ…ηΕ®ΫΊ÷ΙΤΒ¬ ΒΡ–≈Κ≈≤ΩΖ÷ΓΘ”––©¥ΪΗ–Τς–≈Κ≈“Σ«σ≤…”ΟœύΜΞ¥°ΝΣΒΡΕύ÷÷άύ–Ά¬Υ≤®ΤςΓΘ¥σΕύ ΐ¥ΪΗ–Τς ΐΨί±μ÷–ΕΦ÷ΗΕ®ΝΥ“ΜΗωΜυ±ΨΒΡΫ”ΩΎΒγ¬ΖΘ§ΒΪ≤ΔΈ¥ΧαΦΑΥυ–η“ΣΒΡ¬Υ≤®–Έ ΫΓΘœΒΆ≥…ηΦΤ’Ώ±Ί–κ‘Ύ≥ΙΒΉΝΥΫβ–η“ΣΒΡ¬Υ≤®–Έ Ϋ“‘ΚσΘ§‘ΌΫ®ΝΔœΒΆ≥ΓΘ ΐΉ÷ΉΣΜΜ ΈΣΝΥ Ι”Ο¥ΪΗ–Τς¬Υ≤®ΚσΒΡ–≈Κ≈Θ§±Ί–κ”Ο“Μ÷ΜADCΕ‘ΡΘΡβ–≈Κ≈ΉςΝΩΜ·Θ§ Ι÷°Ϋχ»κ ΐΉ÷”ρΓΘADCΒΡ―Γ‘ώ÷ς“Σ «ΩΦ¬«œΒΆ≥Ε‘≤…―υΥΌΕ»ΚΆΖ÷±φ¬ ΒΡ“Σ«σΓΘΥυ–η≤…―υΥΌΕ»”κ¥ΪΗ–ΤςΒΡ¥χΩμ“‘ΦΑœΒΆ≥–η“ΣΥΔ–¬ΒΡΥΌΕ»”–ΙΊΓΘΖ÷±φ¬ ΒΡΨωΕ®“ρΥΊ «–η“ΣADCœλ”Π¥ΪΗ–Τς–≈œΔΒΡΦδΗτ ±ΦδΓΘœΒΆ≥ΒΡ Ι”ΟΡΘ–ΆΨωΕ®ΝΥ’βΗωΥΌΕ»“‘ΦΑΖ÷±φ¬ “Σ«σΓΘάΐ»γΘ§“ΜΗωΤ’Ά®Ά”¬ί“«Μα“‘0.67mV/(Γψ)≤βΝΩ360ΓψΒΡ–ΐΉΣΘ§ΜώΒΟ241mVΒΡ δ≥ωΝΩ≥ΧΓΘΈΣ±Θ≥÷¥Ι÷±Θ§“ΜΗω÷±…ΐΜζΑ°ΚΟ’Ώ–η“Σ“‘1ΓψΒΡΝΘΕ»ΜώΒΟΆ”¬ί“«–≈œΔΘ§ΒΪΆΧΆ¬ΝΩ÷Μ”–10k≤…―υ/ΟκΓΘ’βΗω–η«σΨΆ“Σ”Ο“ΜΗω10bit ADCΘ§ΧαΙ©0.35Γψ/bitΓΘ≤ΜΙΐ“ΣΉΔ“βΘ§–≈Κ≈…œ»‘»Μ”–‘κ…υΘ§Γά1 bit «Ω…Ϋ” ήΒΡΓΘΖ¥÷°Θ§“ΜΩνΖάΕΕ ΐ¬κœύΜζΩ…Ρή–η“Σ0.02ΓψΒΡΝΘΕ»Θ§ΒΪΆΧΆ¬ΝΩΈΣ5k≤…―υ/ΟκΘ§¥”Εχ‘ΎœύΜζ’ώΕ· ±Βς’ϊΆΦœώ¥ΪΗ–ΤςΓΘ’β÷÷“Σ«σΩ…Ρή–η“Σ≤…”Ο16ΈΜADCΘ§ΧαΙ©0.005Γψ/ΈΜΓΘ 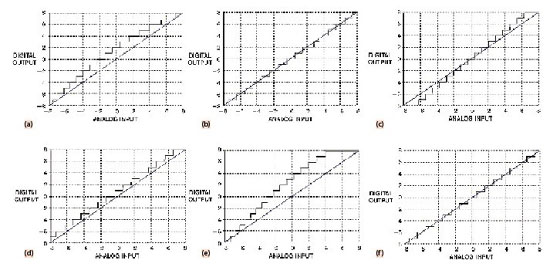 ΆΦ3Θ§ΫΪINLΈσ≤ν (a)ΓΔDNLΈσ≤ν (b)ΓΔ‘ω“φΈσ≤ν (c)ΓΔΤΪ“ΤΈσ≤ν (d) “‘ΦΑΉήΈσ≤νœύΫαΚœΘ§ΨΆΡήΝΥΫβ“ΜΗωάμœκADC (f) ”κ Β”ΟADCΓΘ ÷Τ‘λ…Χ“‘INLΘ®’ϊΧεΖ«œΏ–‘Θ©ΓΔDNLΘ®≤νΖ÷Ζ«œΏ–‘Θ©ΓΔΤΪ“ΤΈσ≤νΓΔ‘ω“φΈσ≤νΚΆSNRΘ®–≈‘κ±»Θ©Β»÷Η±ξά¥ΝΩΕ»ADCΒΡΨΪΕ»ΓΘΒ±Α―’β–© θ”οΝΣΚœΤπά¥ ±Θ§ΨΆΧαΙ©ΝΥΕ‘ADCΉήΈσ≤νΒΡ“ΜΗωΝΥΫβΘ®ΆΦ3Θ©ΓΘΕ‘”ΎΕύ ΐ”Π”ΟΘ§ΟΜ”–±Ί“ΣœΗΨΩ’β–©ADCΒΡΙφΗώΘ§ΒΪΙΛ≥Χ Π”Π≥δΖ÷άμΫβ’β–©÷ΒΕ‘Υυ”ΟADCΒΡ“β“εΓΘΡψΩ…“‘―Γ‘ώ Ι”ΟΆβΫ”ADCΘ§Μρ“ΜΩνΡΎ÷ΟADCΒΡΈΔ¥ΠάμΤςΓΘΆβΫ”ADC”–ΫœΗΏΒΡΨΪΕ»Θ§‘ΎΥΌΕ»ΚΆΖ÷±φ¬ ΖΫΟφΕΦ”–ΫœΗΏΒΡ–‘ΡήΓΘ≤ΜΙΐΘ§¥σΕύ ΐ¥ΪΗ–ΤςΒΡ”Π”Ο“Σ«σΕΦΡήΚήΚΟΒΊ Κœ”ΎΈΔΩΊ÷ΤΤςΡΎ÷ΟΒΡADCΓΘ ΝμΆβ“Μ÷÷―Γ‘ώ «≤…”ΟΩ…≈δ÷ΟADCΘ§Υϋ «ΈΔΩΊ÷ΤΤς÷–ΑϋΚ§ΒΡΩ…±ύ≥Χ¬ΏΦ≠ΩιΓΘΦ·≥…ΒΡ ΐΉ÷”κΡΘΡβΩ…±ύ≥ΧΩιΩ…“‘ΈΣΟΩ÷÷¥ΪΗ–Τς”Π”ΟΕ·Χ§ΒΊΕ®“εΩ…≈δ÷ΟΆβ…ηΓΘ’β–©ΩιΑϋά®ΦΤ ΐΤςΓΔPWMΘ®¬ω≥εΩμΕ»Βς÷ΤΤςΘ©ΓΔUARTΓΔSPIΘ®¥°––Άβ…ηΫ”ΩΎΘ©ΓΔΖ≈¥σΤςΓΔ¬Υ≤®ΤςΓΔADCΚΆDACΓΘΩΣΖΔ’ΏΜΙΩ…“‘‘Ύ“Μ÷ΜΤςΦΰΡΎ Βœ÷Ζ≈¥σ”κ¬Υ≤®ΦΕΘ§¥”ΕχΦ·≥…’ϊΗωΡΘΡβ–≈Κ≈Ν¥Θ®ΆΦ4Θ©ΓΘ≤…”ΟΩ…≈δ÷ΟADCΩ…“‘ΒΟΒΫ±»Έό‘¥‘ΣΦΰΖΫΖ®ΗϋΗ…ΨΜΒΡ…ηΦΤΓΘΝμΆβΘ§Ω…“‘Ε·Χ§ΒΊ÷Ί–¬≈δ÷Ο’β–©ΩιΘ§’β–©ΨΆΩ…“‘―Γ‘ώΫΪ’β–©œΒΆ≥Ή ‘¥÷Ί–¬άϊ”Ο”ΎΤδΥϋΙΠΡήΓΘ 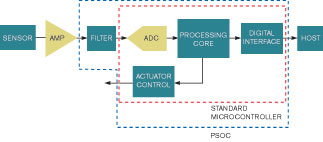 ΆΦ4Θ§ΩΣΖΔ’ΏΩ…“‘‘Ύ“Μ÷ΜΤςΦΰΡΎ Βœ÷Ζ≈¥σΦΕ”κ¬Υ≤®ΦΕΘ§Φ·≥…’ϊΗωΡΘΡβ–≈Κ≈Ν¥ΓΘ ¥ΪΗ–Τς‘ΎΦΧ–χœρΚήΕύ –≥Γ…χΆΗΘ§ΈΣ»ΥΟ«¥χά¥ΗϋΕύΒΡΩΊ÷Τ”κΗϋ¥σΒΡΝιΜν–‘ΓΘ¥ΪΗ–ΤςΆ®ΙΐΕ‘ΜΖΨ≥ΒΡΙήάμάΐ»γΈ¬Ε»ΦύΩΊΧαΗΏΝΥΩ…ΩΩ–‘Θ§Ά®ΙΐΖ¥άΓΜζ÷ΤΗΡΫχΝΥ–‘ΡήΘ§≤Δ Βœ÷ΝΥ–¬–Ά”ΟΜßΫ”ΩΎΓΘΕ‘”ΎΚήΕύ’β–©…ηΦΤά¥ΥΒΘ§ΈΔΩΊ÷ΤΤς÷–Φ·≥…ΒΡADCΧαΙ©ΝΥΉψΙΜΒΡΝΘΕ»ΚΆΨΪΕ»ΓΘ≤Μ λœΛΡΘΡβ…ηΦΤΒΡΩΣΖΔ»Υ‘±Ω…ΡήΜα‘Ύ¥ΪΗ–Τς”κΈΔ¥ΠάμΤς÷°ΦδΒΡΡΘΡβ–≈Κ≈Ν¥…œ”ωΒΫ¬ιΖ≥ΓΘ ΕύΦΕΡΘΡβ–≈Κ≈¬ΖΨΕΒΡ Βœ÷ΥΤΚθΚήΗ¥‘”Θ§”»Τδ «Ε‘Ρ«–©÷ς“Σ‘Ύ ΐΉ÷”ρΉω…ηΦΤΒΡΙΛ≥Χ ΠΟ«ΓΘ≤ΜΙΐΘ§ΫΪΡΘΡβ–≈Κ≈”ρΖ÷ΗτΈΣΕύΗωΖ≈¥σΓΔ¬Υ≤®ΚΆADCΦΕΚσΘ§ ΐΉ÷œΒΆ≥ΩΣΖΔ’ΏΨΆΩ…“‘Ηϋ»ί“ΉΚΆΗϋΨΪ»ΖΒΊ≤ΕΉΫ“ΜœΒΝ–ΙΛ“Β”κœϊΖ―”Π”Ο÷–ΒΡ¥ΪΗ–Τς ΐΨίΓΘΝμΆβΘ§≤ΜΕœ”Ωœ÷ΒΡICΓΔΩ…≈δ÷ΟADCΚΆ¬Υ≤®Τς…ηΦΤΙΛΨΏΒ»ΕΦΩ…“‘¥σ¥σΦρΜ·¥ΪΗ–ΤςΒΡ…ηΦΤΓΘ |



Άχ”―Τά¬έ