
基于模糊控制的远程康复信息采集系统设计
发布时间:2010-10-7 21:35
发布者:eetech
|
1 引言 远程康复是一项现代信息及通信技术与康复医学相结合的多学科交叉课题,它可以被定义为:在综合运用通信、远程感知、远程控制、计算机、信息处理等技术的基础上,实现的远方康复医疗服务。 国外在此方面的研究出发点各有不同,归纳起来,主要是将远程康复系统当作一种通信手段,来消除辅助器具评价专家与远方残疾人士之间的空间障碍,对如何把远程康复系统本身作为一种辅助器具评价诊断系统,促进康复医学的发展等方面,虽有所提及,但尚未作实质性研究。国内在这方面的产品,仅见深圳残联自行研制开发的全国第一个残疾人远程康复系统的报导,该系统着眼于专家和病人的沟通与交流,使残疾人在网上可以向专家进行康复咨询,得到康复方面的建议。 从目前国内外的发展情况来看,各方的研究都有较大局限,均处在起步阶段。因此进行远程康复系统的研究具有重要的意义。 远程康复系统中,信息采集系统是其主要的组成部分,如何远距离对信息采集系统进行有效控制,其实现效果的优劣,实现速度的快慢,对整个系统的性能起着关键性的作用。由于远程康复信息采集系统是多变量、非线性的时变系统,很难建立整个同步控制系统的精确数学模型。因此就需要利用一种有效的控制方法——模糊控制。 2 远程康复信息采集控制系统的构成 远程康复信息采集控制系统示意图如图1所示。该系统就是一个辅助摄像用的机器人,它可以接受指令以某条空间曲线为路径来观察患者。此控制系统主要由两个功能模块来实现,一是现场站点的PC机,通过Internet来接收远方站点的控制命令,经过模糊控制算法处理之后,再通过RS 232串口传给单片机处理系统,来控制小车、云台、摄像机的运动。另外现场站点的PC机还可以将从摄像机采集到的图像信息根据要求进行处理,再通过Internet以适当的方式呈现给远方站点,供远方的康复专家和辅助设计厂商诊断、设计之用。二是单片机控制系统,主要用来控制小车、云台、摄像机的运动,使其能够到达合适的方位,以便远方康复专家不受时空限制、实时地观察患者的身体状况,进行远程诊断和评估。单片机控制系统还可以对检测电机到位等传感器的信号进行处理,并将控制模糊控制系统执行单元的情况反馈给远方站点。简单来说,此模糊控制系统主要实现自动控制装载信息采集装置的小车、带动摄像机的云台和摄像机的运动,根据要求采集实时视频或图像信息,供诊断和辅助产品设计之用。 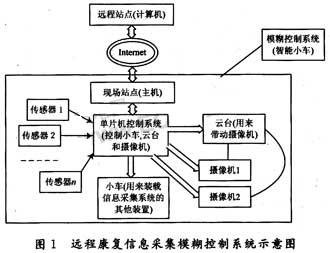 3 远程康复信息采集系统的模糊控制设计 3.1 信息采集系统的模糊控制策略 本系统的输入变量为:小车到目标的转向角,小车到目标的距离,云台距离目标的高度,摄像机与目标的方向角和距离,一共6个输入变量。输出变量为:小车舵电机的运行速度、方向,小车驱动电机的运行速度、方向,带动云台上下运动的电机的运行速度、方向和云台的四个转向一共10个输出变量。所以该信息采集系统初步控制对象就有6个输入变量和10个输出变量,属于多输入一多输出结构的模糊控制器。 通过模糊解藕将此多输入一多输出模糊控制结构转化为单变量模糊控制器来进行设计。下面以控制小车驱动电机的速度为例来详细说明模糊控制规则的建立。 小车驱动电机采用步进电机,其速度是通过改变驱动信号的脉冲频率来控制的。因此,对小车驱动电机速度的控制采用单变量二维模糊控制器,输入量为小车到目标距离的误差e以及小车到目标距离误差的变化率ec,输出变量为控制脉冲的频率f。在模糊控制的具体实现方法上,采用模糊查表法,其原理如图2所示。 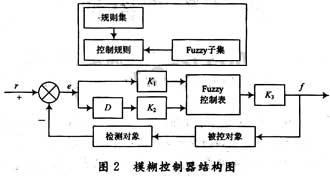 对每一次采样得到的误差e和误差变化率ec进行量程转换,即乘以比例因子k1和k2,然后进行量化,将输入的物理信号值转换为输入论域上的点,就可以通过查询控制作用表得到输出控制量。它是输出论域上的点,再乘以比例因子k3进行量程转换,就得到所需要的控制脉冲频率值f。控制作用表是输入论域上的点到输出论域上的对应关系。它已经是经过了模糊化、模糊推理和解模糊的过程,可以离线计算得到。查表法结构简单,实施方便,资源开销少,在线运行速度快。 误差e、误差变化量ec和控制量f的基本模糊子集为{NB(负大偏差),NS(负小偏差),0(零),PS(正小偏差),PB(正大偏差)}。在系统中,小车到目标距离误差e的论域为E,小车到目标距离误差变化率ec的论域为EC,输出控制量f的论域为F。根据系统的实际状况,将其大小量化为5个等级,分别为{-3,-1,0,+1,+3),选择如图3所示的隶属函数曲线,控制器可完成对输入变量的模糊化。 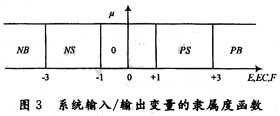 模糊输入变量再由模糊控制规则进行推理决策,得到模糊输出语言变量{NB(负大),NS(负小),0(零),PS(正小),PB(正大)}。同样道理,经过模糊控制器推理的输出结果也必须变换成实际的校正量,调节控制小车驱动电机速度的脉冲频率,完成对小车速度的控制。 为了简化编程,便于实时控制,本系统将控制规则表格化。模糊控制器按表1所示的控制状态表进行控制。 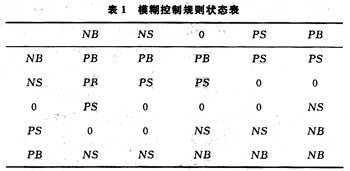 误差E,误差变化率EC的量化因子k1和k2的选取对控制系统的动态性能的影响很大。k1决定了系统的响应速度,k1越大系统的响应越快,但超调也越大,过渡时间就越长。k2影响系统的超调,k2选取越大,系统的超调就会越小,但系统的响应时间就会越长。k3为模糊控制器的总增益,选取过小会使系统的动态响应过程变长,而选择过大会导致系统震荡。 其他控制量的控制规则和上述小车驱动电机速度的控制类似。 3.2 信息采集控制系统的软件设计 目前,模糊控制器构造有三种技术:采用传统的单片机或微型机作为物理基础,编制相应的软件实现模糊推理和控制;用单片机或集成电路芯片构造模糊控制器,利用配置数据来确定模糊控制器的结构形式;采用可编程门阵列构造模糊控制器。由于远程康复系统现场站点需要一台微机作为接收远方的控制命令和处理来自摄像机的图像信息并通过Internet来传送信息,所以为了充分利用和节省资源,我们采用微机作为物理基础,编制相应的软件实现模糊推理和控制。 模糊控制的上位机软件设计主要就是模糊控制算法的设计和实现,同时也包括微机与单片机的串口通讯部分和与Internet接口部分的设计实现。其程序流程如图4所示。 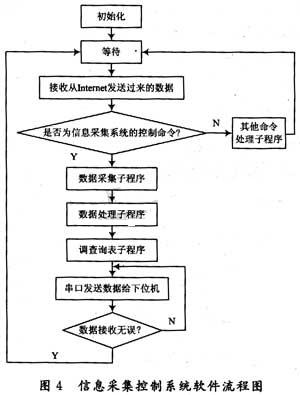 该部分主要实现对信息采集系统的模糊控制功能。系统运行前,该上位机程序首先要进行初始化,设置串口,为系统正确运行做好准备。当远程控制命令通过Internet传送到现场站点的PC机,经过模糊控制算法的处理,再经串口将命令下达给单片机控制系统来执行。此控制过程不需要现场站点的人员来操作,完全采取远程控制,这样远程专家就能很方便地根据需要控制信息采集系统的运行,同时也方便了现地医师或病人家属,减少了由于远程专家和现地医师或家属的交流障碍而引起的操作错误。 4 结语 本系统利用模糊控制技术解决了对远程康复信息采集系统的远程智能控制,使位于远方的康复专家和辅助设计师能够通过Internet方便地遥控现地的信息采集系统以合适的方式和角度准确、实时地进行数据信息的采集,供诊断和辅助产品设计之用。试验证明,该控制系统达到了我们的设计要求,能够远程实时地进行三维视觉信息的采集。 |


网友评论