
基于多轴运动控制器在转台控制系统中的应用
发布时间:2010-8-20 14:30
发布者:lavida
|
随着自动控制理论和数字计算机及其应用技术的不断发展,以计算机为基础的控制技术迅猛发展,被控对象规模更大,控制过程和规律也更加复杂和精密,控制方法也更加灵活多样。在转台的控制系统中,除了用来产生输入信号的仿真机之外,计算机还扮演了控制器的角色。根据控制器的不同形式,计算机控制系统分为集中式、分布式、集散式三种类型,其中集散式控制器又分为PC机与单片机、PC机与PC机、PC机与嵌入式控制器三种形式。转台运动控制系统是转台设计中最为关键的部分,本课题中选用PC机与嵌入式控制器的形式,其中PC机采用性能稳定的IPC(工控机),嵌入式控制器选用美国DeltaTau公司的可编程多轴控制器PMAC,即IPC+PMAC。 1 转台的基本结构与组成 由于各种民用、军用飞行器技术的快速发展,当今世界各国都十分重视半实物仿真技术的研究和应用,而三轴转台是半实物仿真的重要设备之一。通常,三轴转台提供模拟飞行器飞行姿态角和为被试件提供测试条件的功能,以便验证全数字仿真的实验结果并进一步优化或改良飞行器设计方案。转台负载放在内框之上,由平板固定,内框、中框和外框均可绕其轴向做360°旋转运动,可以模拟飞行器的3个自由度的横滚、俯仰和航向运动。三轴转台由控制部分和机械部分组成,转台的控制部分由一个控制柜和一台IPC组成,转台机械结构由框架结构、动力源、支承结构、驱动方式、轴系结构、配重方式等组成。本课题中的转台采用UOO结构,外框架采用音叉形式(U型),其结构简单,转动惯量小,并可相应缩小转台总体尺寸;中框架和内框架采用封闭框形式(O型),易于实现整圈旋转。转台的3个轴系均采用精密机械轴承支撑,直流无刷电机驱动,运用海德汉增量式编码器进行速度、位置反馈,并在每轴运用滑环进行导线转接,可使框体做无限旋转运动。 2 PMAC控制器简介 PMAC(Programmable Multi-Axis Controller)是美国Delta -Tau公司生产的系列运动控制器。使用Motorola的DSP56000系列芯片作为CPU,最多可实现8轴的伺服控制。具有良好的硬件开放性和软件开放性。 2.1 PMAC的硬件开放性 PMAC支持多种工作平台,允许在PC、STD、VME、PCI等不同总线上运行,方便了用户选择主机类型;有模拟和数字两种伺服接口,能与步进电机、直流伺服电机、交流伺服电机等多种电机连接,并可对不同的电机提供相应的控制信号;可接受各种检测元件的反馈信息,包括测速发电机、光电编码器、光栅、旋转变压器等;提供串行方式、并行方式和双端口RAM方式与PC机进行双向通信;绝大部分地址向用户开放,包括电机信息、坐标信息及各种保护信息,这些硬件的开放性使用户可以很方便地根据自己的需要进行硬件设备的搭建。 2.2 PMAC的软件开放性 PMAC支持各种高级语言,用户可以使用VB、VC、Delphi等在Windows软件平台上制定用户专用界面;PMAC提供了包含速度和加速度前馈的PID控制和阶式滤波器,电机和负载的双编码器,能纳入用户开发的伺服算法。PMAC具有很强的计算能力,许多数学、逻辑和超越函数的计算都能通过用户程序中的变量和常数进行;内含可编程逻辑控制器。PMAC的I/O点可以扩展至2 018位,所有的I/O点都由软件来控制,只要使用一个类似高级程序中的指针变量指向某一I/O地址,就可以方便地在运动程序和PLC程序中通过该指针变量来对该I/O点进行输入或输出控制。同时该PLC工具有强大的逻辑功能和判断能力,可编制复杂的逻辑关系。 3 控制系统的介绍 3.1 控制系统的原理 对于转台的方位控制,首先通过GPS等得到目标点的方位坐标,经过IPC机计算出目标点的方位角度,把位置信号送入PMAC卡,通过绝对式光电码盘形成闭环,从而达到位置伺服目的,包括速度环和位置环两部分,其控制原理如图1所示。 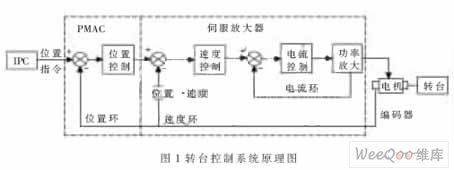 其中速度环由直流脉宽伺服系统、直流力矩电机以及测速电机构成,测速电机与直流力矩电机同轴并反馈成与转速成正比的电压信号,至直流脉宽伺服系统,从而形成速度闭环。 位置环由PMAC卡、直流脉宽伺服系统、直流力矩电机、光电码盘构成,光电码盘与直流力矩电机同轴并反馈位置信号至PMAC卡,从而形成位置闭环,以实现动态目标跟踪的目的, 3.2 控制系统的硬件组成 为了提高系统的运动可靠性和快速响应能力,转台采用上下位机的两级控制方式,其硬件组成如图2所示。 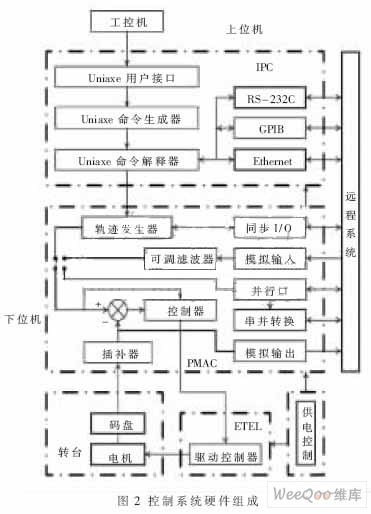 其中上位机主要根据控制规律进行计算、处理、逻辑判断和存储,实现转台控制的集中监控、综合管理,主要实现系统实时在线综合管理、性能检测、安全保护及监控管理以及数据采集与处理功能。在转台系统运行过程中,上位机完成转台系统性能参数的图形显示、数据处理,得出系统工作所必需的指令和参数。由于工业控制计算机抗震性和抗干扰能力强,工作可靠性高,目前被广泛用于现场数据采集处理及伺服系统的上位计算机。本系统采用研华工控机作为上位机,集中控制多套伺服系统。 下位机是转台控制系统的直接控制级,构成转台内、中、外框三个独立的伺服控制回路。下位机完成伺服控制系统的数据采集与处理、控制律的实施并实现与上位机实时通信。本系统中下位机由PMAC充当,PMAC控制卡通过标准总线与上位机相联,码盘等测速或测角机构通过PMAC上的DD接口传递位置、速度等信息,经PMAC处理,并按上位机给出的控制要求通过PMAC上的DA接口输出合适的电平信号控制转台上的电机运动,从而构成控制闭环。 另外,PMAC通过总线向上位机交换报告转台位置、运行安全等信息,并从上位机获得程序运行所需要的命令,如程序开始、结束和系统复位等。由于PMAC自身的特性,使诸如码盘信号换算、行程限位等功能可以很方便地实现,且PMAC的可编程特性使系统具有很强的扩展能力,整个系统构成要比普通的上下位机系统显得简单实用。而PMAC的使用也使系统更具通用性,只需作少量调整即可应用于其他设备。 4 运动控制系统软件设计 本课题中下位机选用PMAC运动控制卡。该运动控制卡是现在使用的比较普遍、可靠性很高的多轴运动控制器,它的核心硬件是DSP与FPGA,提供运动控制、逻辑控制、数据采集、信息处理、同主机交互等强大的资源,其最大的特点是软硬件的开放性。PMAC可以通过执行软件(PEWIN)实现各种控制的基本操作及系统调试,从而实现执行运动程序、执行PLC程序、伺服环更新、资源管理等主要功能。 对于转台的控制系统,系统功能实现实际由工控机和PMAC卡共同分担完成,运动控制软件包括2个部分:工控机主要完成人机界面、系统任务管理、视频显示、方位角度计算与发送等功能;MAC卡主要实现所要求的运动控制、I/O管理、PLC等功能。 4.1 上位机控制软件的开发 对于转台控制系统上位机的工控机,基于WindowsXP操作系统,利用VisualC++6.0开发系统开发了转台运动控制系统软件,具有视频显示、转台控制方式选择、转台运动状态显示、GPS信号显示、异常报警等功能,利用下位机封装好的各类运动控制函数和参数设置功能函数,在上位机软件开发时实现“下位机透明”式的开发,使上位机界面开发以及和其他功能集成时无须关注运动控制层的细节,从而更着重于其他方面功能的实现。 4.2 下位机控制软件的开发 下位机控制系统中PMAC卡上集成了丰富的运动控制指令和算法,为转台的运动控制提供了方便,对于转台控制下位机软件的开发,充分利用PMAC卡的开放性,主要包括位置伺服模块、PLC监控模块等,位置伺服模块可通过设置PMAC卡内部PID参数实现,PLC监控模块用于实时提取转台运行状态信号,包括当前的运行方位、运行速度及是否都达到位置限位等,主要包括PMAC的设置和PMAC运动程序的编写。 4.3 工控机与PMAC卡的通信软件 外部信号通过计算机串口送入工控机,转换成方位角度后送入PMAC卡,转台的运动方位信息实时通过工控机进行显示,同时,各种控制指令也是通过工控机传给PMAC卡,从而实现各种控制目的,本系统利用PMAC卡提供的PCOMM32通信套件,采用动态链接库方式,便于上下位机软件的模块化和封装并使得上位机编程环境的选择更加自由。 本课题以PMAC卡为核心对三轴转台的硬件及软件进行了设计,通过PMAC构建转台控制系统,具有实时能力强、系统稳定、易操作等优点。将PMAC作为转台的控制器在理论和实际上都是可行的,使系统设计和应用程序的设计大大简化,设计者只需要较少的代码就可以达到目的。另外,当整个系统投入使用并进入维护阶段,采用PMAC这样的标准部件也减少了软/硬件维护的困难,作为三轴转台的改造设计是一个非常好的方法。 |

网友评论