
ЬНВтЦїеѓСаЪ§ОнЪЕЪБВЩМЏЫуЗЈЩшМЦ
ЗЂВМЪБМфЃК2010-8-18 10:59
ЗЂВМепЃКlavida
|
1 в§бд ЬНВтЦїеѓСа(Detector Arrays)ВтСПЯЕЭГжаЃЌЮЊСЫОЋШЗВтСПвЛаЉЙтЧПаХКХЃЌЭЈГЃашвЊЖдДЋИа ЦїЪфГіаХКХНјааИпЫйЁЂИпЗжБцТЪВЩбљЃЌВЂвЊЧѓВЩМЏЭМЯёЪЕЪБЯдЪОЁЃДггВМўвЊЧѓРДПДЃЌВЩгУ ЕФA/D ЦїМўЫйТЪдк800 MHz вдЩЯЃЌПЩЪЕЯжЪ§ОнЕФИпЫйВЩМЏЁЃЭЌЪБЃЌЪ§ОнДцДЂММЪѕвВе§дкВЛ ЖЯЭъЩЦКЭЬсИпЃЌДцДЂШнСПдНРДдНДѓЃЌдкЪаГЁЩЯвбГіЯжШнСПДя1T byte зѓгвЕФгВХЬЁЃвбгаЕФ Ъ§ОнВЩМЏЯЕЭГДѓЖрЪ§ВЩгУЛљгкPCI змЯпЕФНсЙЙ[3ЁЋ4]ЃЌЕЋдкЖдЪ§ОнПЩППадвЊЧѓКмИпЕФЧщПіЯТЃЌ ЛљгкPCI змЯпЕФЪ§ОнВЩМЏЯЕЭГЕФПЩППадВЛФмТњзувЊЧѓЁЃБЃжЄЪ§ОнЕФПЩППадгыЭъећадЕФЭЌЪБЃЌ ЪЕЯжЪ§ОнЕФИпЫйДЋЪфгыЪЕЪБЯдЪОГЩЮЊЩшМЦИУЪ§ОнВЩМЏЯЕЭГЕФЙиМќЫљдкЁЃ ФПЧАЖдЪ§ОнВЩМЏЕФбаОПНЯЖрЃЌЕЋЖдИпЫйЪ§ОнВЩМЏЕФЫуЗЈЯрЖдНЯЩйЃЌвВгавЛаЉЖдИпЫйЁЂИп ЗжБцТЪЪ§ОнВЩМЏЕФЫуЗЈ[5ЁЋ6]ЃЌЕЋетаЉЫуЗЈДѓЖрВЩШЁЪ§ОнбЙЫѕЗЈЃЌвЛАуКмФбБЃжЄЪ§ОнЕФЭъећадЁЃ ЮЊДЫЃЌБОЮФдкЫуЗЈЩшМЦжаЬсГіСЫвЛжжМШФмБЃжЄЪ§ОнЭъећадгыПЩППадЃЌгжФмЪЕЯжИпЫйДѓХњСПЪ§ ОнЕФЪЕЪБВЩМЏЫуЗЈЃЌДгЖјНтОіДЫЮЪЬтЁЃ 2 ЯЕЭГУшЪі дкМЄЙтДѓЦјДЋЪфЪЕбщжаЃЌЙтЧПВтСПЯЕЭГгЩЖрДЋИаЦїЬНВтеѓСаЙЙГЩЁЃДЋИаЦїЬНВтеѓСаЙВга1024 ИіЬНВтЕЅдЊЁЃЖдгкУПИіФЃПщЃЌаХКХЭЈЙ§ФЃФтПЊЙиЫЭШыЪ§ОнВЩМЏПЈЃЌгЩМЦЫуЛњНјааДІРэЁЃ дкМЄЙтДѓЦјДЋЪфЪЕбщжаЃЌЖдВтСПЯЕЭГЕФЮШЖЈадгыПЩППадвЊЧѓМЋИпЁЃЖдЪ§ОнВЩМЏШэМўЕФадФмМА жИБъвЊЧѓЪЧЃКБЃжЄ100Hz жЁЦЕЯТЃЌЪ§ОнВЩМЏВЛЖЊжЁЃЌЭМЯёЭъећЃЌЮоТвТыЁЃ ДгММЪѕНЧЖШПДЃЌФПЧАPCI змЯпзюДѓЪ§ОнДЋЪфЫйТЪПЩДя133MB/s ЃЌЯрЖдНЯИпЃЌЕЋЛљгкPCI змЯпЕФЪ§ОнВЩМЏЯЕЭГЕФПЩППадВЛФмТњзувЊЧѓЃЌЧв100Hz жЁЦЕдкЯжгаЕФЪ§ОнВЩМЏЯЕЭГжавбВЛ ЫуИпЁЃЮЊДЫЃЌЪЕбщжаВЩгУвЛжжзЈУХЮЊЧЖШыЪНПижЦЖјЖЈвхЕФЙЄвЕПижЦзмЯпЁЊЁЊPC104 змЯпЁЃДЫ змЯпвдЁАеыЁБКЭЁАПзЁБаЮЪНВуЕўСЌНгЃЌМДPC104 змЯпФЃПщжЎМфзмЯпЕФСЌНгЪЧЭЈЙ§ЩЯВуЕФеыКЭЯТВу ЕФПзЯрЛЅвЇКЭЯрСЌЃЌетжжВуЕўЗтзАгаМЋКУЕФПЙе№адЁЃДЫзмЯпЫфТњзуСЫПЩППадЕФвЊЧѓЃЌШЛЖјЫќ ЕФДЋЪфЫйТЪЯрЖдгкPCI змЯпШДДѓДђелПлЃЌдьГЩPC104 змЯпгыPC ЛњжЎМфЕФДЋЪфЫйТЪЪмЕНЯожЦЁЃ 3 Ъ§ОнВЩМЏЫуЗЈЩшМЦ еыЖдвдЩЯЧщПіЃЌБОзХдкЪЕбщжаЪ§ОнВЩМЏОпгаЪЕЪБадКЭВЛПЩжиИДадЃЌШчЙћГіЯжднЪБадвчГіЃЌ гІгХЯШБЃжЄЪ§ОнЕФећЬхЭъећадЕФддђЁЃ БОЪ§ОнВЩМЏШэМўдкЩшМЦжаЬсГіСЫЛКГхЧјАыТњДцДЂЫуЗЈЁЃДЫЫуЗЈКЭЯжгаЪ§ОнВЩМЏЯЕЭГжаЕФ ЛКГхЧјЫуЗЈЁЂЪ§ОнбЙЫѕЫуЗЈЯрБШЃЌЦфзюДѓгХЪЦдкгкВЩЕНЕФЪ§ОнВЛвзЖЊЪЇЃЌИќФмБЃжЄЪ§ОнЕФЭъ ећадЃЌЧвДѓДѓЬсИпСЫPC104 змЯпгыPC ЛњжЎМфЕФДЋЪфЫйТЪЁЃ ЭЌЪБШэМўЩшМЦжаЪЙгУЪЕЪБЖрШЮЮёПижЦЗНЪНЃЌВЂНЋВЩМЏЕНЕФЪ§ОнвдЖўНјжЦЕФаЮЪНжБНгБЃДц НјЮФМўЁЃетОЭВЛНіДяЕНДцДЂСПДѓЁЂЪ§ОнДЋЪфаЇТЪИпЕФФПЕФЃЌЖјЧвТњзуСЫЭМЯёЪЕЪБДЋЫЭЕФвЊЧѓЁЃ 3.1 ЛКГхЧјАыТњДцДЂЫуЗЈ ЫљЮНЛКГхЧјАыТњДцДЂЫуЗЈЃЌОЭЪЧдкЪ§ОнВЩМЏНјГЬжаЃЌЩшжУвЛИіЪ§ОнHFIFO ЛКГхЧјжИеыЁЃ ЛКГхЧјДѓаЁЩшжУЮЊ8192 ИізжНкЁЃЕБPC104 змЯпЩЯГіЯжЪ§ОнЪБЃЌзмЯпАхжаЪзЯШНЋНгЪеЕНЕФЪ§ ОнжЁЗХШыHFIFO ЛКГхЧјЁЃЕБHFIFO ДяЕНАыТњЪБЃЌОЭЖСГіЕЭЮЛЕФ4096 ИізжНкЕФЪ§ОнЃЌЖСГі Ъ§ОнЕФЭЌЪБЃЌЮЊHFIFO ЬкГіСЫПеМфЃЌЖјзмЯпАхжаНгЪеЕНЕФЪ§ОнжЁМЬајЗХШыHFIFO ЛКГхЧјЁЃ ОпЬхВйзїШчЯТЃК ЪзЯШЃЌНЋЛКГхЧјЗжЮЊвдЯТ 5 жжзДЬЌЃК зДЬЌ 0 БэHFIFO Пе зДЬЌ1 БэHFIFO ЗЧПеЕЋВЛЕНАыТњ зДЬЌ2 БэHFIFO ДяЕНЛђГЌЙ§АыТњЃЌЕЋЮДЕНШЋТњ зДЬЌ3 БэHFIFO ШЋТњ зДЬЌ4 ЦфЫћЪ§жЕ БэЮДжЊзДЬЌЃЌВЛгІИУГіЯж ЦфДЮЃЌЖдHFIFO ЕФзДЬЌНјааХаЖЯЃК aЃЎЕБЪ§ОнЮДДяЕНЛКГхЧјДѓаЁЕФвЛАыЪБЃЈМДзДЬЌ0 ЛђзДЬЌ1ЃЉЃКДЫЪБЗЕЛиЃЌНјааЪ§ОнВЩ МЏЁЃ bЃЎЕБЪ§ОнДяЕНЛђГЌЙ§ЛКГхЧјДѓаЁЕФвЛАыЕЋЮДЕНШЋТњЃЈМДзДЬЌ2ЃЉЃКНјГЬНЋЯШХаЖЯвЛЯТ HFIFO зДЬЌЃЌШєЮЊАыТњЃЌОЭвЛДЮЖСГіЫљгаЕФ4096 ИізжНкЕФЪ§ОнЃЛШєГЌЙ§АыТњЃЌЕЋЮДШЋТњЃЌ ДЫЪБжЛНЋЕЭЮЛ4096 ИізжНкЕФЪ§ОнЖСГіЃЌдИпЮЛЕФЪ§ОнЧАвЦЃЌеМОнHFIFO ЕЭЮЛЁЃдйНЋЖСГіЕФ ЫљгаЪ§ОнжБНгБЃДцЕНЖўНјжЦЮФМўжаЁЃ етРяЬиБ№ЬсГіЃКгЩгкЖрДЋИаЦїЬНВтЯЕЭГВЩМЏЪБМфНЯГЄЛђВЛЪмЪБМфЯожЦЃЌШэМўЩшМЦжаНЋВЩ МЏЕНЕФЪ§ОнжБНгБЃДцНјЮФМўЃЌетОЭдкДцДЂЙЄГЬжаНкЪЁСЫДѓСПЕФЪБМфЁЃСэЭтЃЌЪ§ОнБЃДцдкЖўНј жЦЮФМўжаЃЌФмЪЕЯжЭМЯёЕФЪЕЪБЯдЪОЁЃ cЃЎЕБHFIFO ШЋТњЃЈМДзДЬЌ3ЃЉЃКДЫЪБЪ§ОнВЩМЏНјГЬжЛвЊЖСПеHFIFO ЛђДяЕНгУЛЇжИЖЈЕФ ИіЪ§ОЭПЩЗЕЛиЁЃЖСЪ§ЪБЗжСНХњЃЌЯШНЋЕЭЮЛЕФ4096 ИізжНкЕФЪ§ОнЖСГіЃЌБЃДцЕНЖўНјжЦЮФМўжаЃЛдйНЋИпЮЛЕФЪ§ОнШЋВПЖСГіЃЌМДЖСПеHFIFOЃЌНєНгзХЧАУцЕФЪ§ОнаДШыЮФМўжаЁЃ ЗжСНХњЖСЪ§ЕФгХЕудкгквдЯТСНЗНУцЃК1ЃЉЫѕЖЬСЫвЛДЮЖСЪ§ЕФЪБМфЃЛ2ЃЉЕЭзжНкЕФЪ§ОнЖСЭъ КѓЃЌЮЊHFIFO ЬкГіСЫПеМфЃЌвдБузмЯпАхжаНгЪеЕНЕФЪ§ОнжЁМЬајЗХШыHFIFO ЛКГхЧјЃЌЪ§ОнВЛ взЖЊЪЇЃЌБЃжЄСЫЪ§ОнЕФЭъећадЁЃ dЃЎЦфЫћЪ§жЕЃКБэЮДжЊзДЬЌЃЌВЛгІИУГіЯжЁЃдкДЫВЛдйЯъЪіЁЃ 3.2 ЖрЯпГЬПижЦ гЩгкВтЪдЯЕЭГЪЧгЩЖрИіЬНВтФЃПщЙЙГЩДЋИаЦїЬНВтеѓСаЁЃвЊЖдЖрТЗВЮЪ§НјааМьВтКЭПижЦЃЌ ЮЊСЫНЕЕЭећИіЯЕЭГЕФИДдгЖШЃЌЪЕЯжЭМЯёЪЕЪБДЋЫЭЃЌТњзуВЩМЏЙ§ГЬЕФИпЫйвЊЧѓКЭжаЖЯвЊЧѓЁЃЛЙ вЊБЃжЄжЁЦЕДяЕНЛђГЌЙ§100HzЃЌашвЊЪ§ОнВЩМЏПижЦШэМўОпгаЖрШЮЮёВЂааЕФФмСІЃЌМДЩшМЦЖрИі ЯпГЬЃЌВЂЧвгЩгкЭъГЩЕФШЮЮёВЛЭЌЃЌИїЯпГЬЕФЩшМЦвВВЛОЁЯрЭЌЁЃШэМўЙВЩшМЦАќРЈЪ§ОнВЩМЏЯп ГЬЁЂПижЦЯпГЬЁЂЛцЭМЯпГЬЃЌГЬађдЫаажазюЖрЪБЛсГіЯжМИИіЯпГЬВЂаадЫааЕФПЩФмЁЃЮЊБЃжЄДѓСП Ъ§ОнЕФЭъећадвдМАОРДэЛжИДЙІФмЃЌЪ§ОнВЩМЏЯпГЬгХЯШМЖИпгкПижЦЯпГЬЁЃШэМўНсЙЙМђЭММћЭМ1ЁЃ ШчЭМ 1 ЫљЪОЃЌHFIFO ЛКГхЧјдкзДЬЌ2 ЪБНјШыЛцЭМЯпГЬ1ЁЃ  ЛцЭМЯпГЬ 1ЃКдкЛцЭМЪБвЊЧѓЯШХаЖЯвЛЯТHFIFO зДЬЌЃЌШєЮЊАыТњЃЌОЭЖСЧА4 жЁМДЕЭЮЛЕФ 4096 ИіЯёЫиЃЌШЛКѓСЂПЬЗЕЛиЃЌНјааЛцЭМЃЌЛцЭМЪБжЛЛцГіЕквЛжЁЃЌзюКѓБЃДцЪ§ОнЁЃ HFIFO ЛКГхЧјдкзДЬЌ3 ЪБНјШыЛцЭМЯпГЬ2ЁЃ ЛцЭМЯпГЬ 2ЃКЖСЗжСНДЮЖСТњ8 жЁМД8192 ИіЯёЫиЃЌШЛКѓСЂПЬЗЕЛиЃЌНјааЛцЭМЃЌЛцЭМЪБвВ жЛЛцГіЕквЛжЁЃЌзюКѓБЃДцЪ§ОнЁЃЛцЭМЯпГЬШчЭМ2 ЫљЪОЁЃ 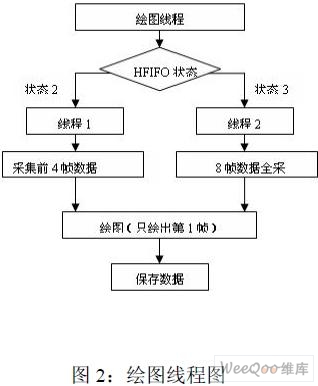 4 Ъ§ОнВЩМЏЫуЗЈЪЕЯж БОЯЕЭГШэМўЦНЬЈВЩгУ Micro ЙЋЫОЕФMicrosoft Visual C# 2005ЃЌИУЦНЬЈОпгаНчУцгбКУЁЂЙІ ФмЧПДѓЁЂзЪдДЗсИЛЕШгХЕуЃЌЭъШЋУцЯђЖдЯѓЕФБрГЬКЭЯћЯЂДІРэЁЃдкЕфаЭЕФMicrosoft Visual C# 2005 ЖрЯпГЬГЬађжаЃЌЪЙгУжїЯпГЬДДНЈЁЂЯдЪОВЂдЫаагУЛЇНчУцЃЌдкДЮЯпГЬжадЫааЦфЫќЕФЖдЪБ МфвЊЧѓКмИпЕФВйзї(ШчDAQ)ЁЃMicrosoft Visual C# 2005 ЦНЬЈЬсЙЉСЫСНжждк Windows ЕФДЮЯп ГЬжадЫааДњТыЕФИпМЖЛњжЦЃЌЗжБ№ЪЧЯпГЬГи(thread pools)КЭвьВНЖЈЪБЦї(asynchronous timers)ЁЃ ЯпГЬГиЪЪгУгкашвЊСЌајЕижДааЖрДЮЛђдкбЛЗжажДааЕФШЮЮёЃЌЖјвьВНЖЈЪБЦїЪЪгУгкдкЙЬЖЈ ЪБМфМфИєФкжДааЕФШЮЮёЁЃгЩгкЪдбщжаВЮЪ§ЕФВЩМЏКЭзмЯпЪ§ОнЕФЪеЗЂЪЧЪзвЊЕФШЮЮёЃЌашвЊСЌај ЕижДааЁЃвђДЫЃЌБрГЬЪБВЩгУЯпГЬГиММЪѕЃЌдкГЬађЕФжїЯпГЬЃЈЪ§ОнВЩМЏЯпГЬЃЉжаДДНЈЯпГЬГиЃЌПижЦЯпГЬЁЂЛцЭМЯпГЬЖМдкЯпГЬГиДДНЈЕФДЮЯпГЬжадЫааЁЃ ОпЬхГЬађжаЩшжУСЫЪ§ОнВЩМЏЯпГЬКЏЪ§ DataThread(),ЛёЕУзДЬЌКЏЪ§GetHFifoStatus()ЁЃдкЛё ШЁHFIFO зДЬЌжаЃЌгУСЫ4 ИіЁАCase: break;ЁБгяОфРДХаЖЯзДЬЌЃЌДгЖјНјаабЛЗЁЃ ЕБНјШызДЬЌ 2 КЭ3 ЪБЃЌЪТМўЗЕЛиКѓБуНјШыЛцЭМЯпГЬЃЌШэМўжЛЩшжУGatherData()ЮЊЛцЭМЯп ГЬКЏЪ§ЁЃЯпГЬПеЯаЪБдђНјааЭМЯѓЕФВЅЗХЃЌЪ§ОнгХЯШБЃДцЃЌSaveData()ЮЊЪ§ОнБЃДцКЏЪ§ЁЃ SaveData()КЏЪ§жаНЋВЩМЏЕНЕФЪ§ОнвдЖўНјжЦаЮЪНжБНгБЃДцЕНТЗОЖЮЊЃКe.FileName ЕФЮФМўжаЁЃ ГЬађЩшМЦЪБВЩгУжБНгжИеыЗНЪНЃЌЬсИпСЫДЋЪфЪ§ОнЕФаЇТЪЁЃ 5 Нсгя БОШэМўВЩгУ Microsoft Visual C# 2005 ПЊЗЂЦНЬЈЃЌОпгагбКУЕФгУЛЇНчУцЃЌВйзїМђЕЅЗНБуЃЌ взгкЮЌЛЄЁЃИУЫуЗЈБрГЬМђЕЅЁЂМЦЫуСПаЁЁЂвзгкгВМўЪЕЯжЃЌЖјЧвЮШЖЈадИпЃЛдкЪЙгУЙ§ГЬжаЬхЯж СЫМЋЧПЕФЪЕгУадЃЌТњзуСЫЬНВтЦїеѓСааХКХЪ§ОнЪЕЪБВЩМЏЕФвЊЧѓЁЃ ЪЕбщжЄУїЃКГЬађжеЖЫЕФЯдЪОДАПкФмЪЕЪБЯдЪОВЩМЏЕНЕФМЄЙтЙтАпаХЯЂЃЌФмздЖЏНЋЦфЪЕЪБДц ДЂЕНЬиЖЈЕФЮФМўМаФкЃЛВЂФмЫцЪБЛиЗХЩЯвЛДЮВЩМЏЕНЕФЙтаХКХЕФЭМЯёаХЯЂЁЃШчЭМ3 ЫљЪОЃК ЪЕбщжаЃЌБОШэМўВЩМЏОЋЖШГЌЙ§ 50KHzЃЌБЃжЄСЫЫљВЩЪ§ОнЕФЭъећадгыАВШЋадЃЌЭЌЪБвВбщжЄСЫ БОЪ§ОнВЩМЏЯЕЭГЕФЮоЮѓДЋЪфМАДЋЪфЕФЪЕЪБадгыИпаЇадЁЃ 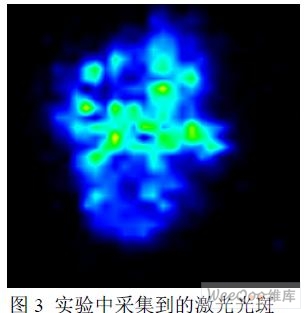 БОЮФзїепДДаТЕуЃКПЊДДадЕФЬсГіСЫЛКГхЧјАыТњДцДЂЫуЗЈЁЃНЋЦфгыЪЕЪБЖрШЮЮёПижЦЗНЪНЯрНсКЯЃЌ НтОіСЫЪЕбщжазмЯпгыМЦЫуЛњжЎМфИпЫйДЋЪфЕФУЌЖмЃЌЪЙЪ§ОнВЩМЏОпгаПЩППадЁЂЭъећадЁЂЪЕЪБад гыИпаЇадЁЃ |
ЭјгбЦРТл