
ЛљгкжБСїДЋИаЦїЛиРЁВЙГЅЯЕЭГЩшМЦ
ЗЂВМЪБМфЃК2010-8-17 16:34
ЗЂВМепЃКlavida
ЙиМќДЪЃК
ЛиРЁВЙГЅ , жБСїДЋИаЦї
|
ГЄЦквдРДЃЌгЩгкМрЪгЁЂМЦСПЁЂПижЦЦѓвЕЩњВњгУЕчЕФДѓЕчСїжБСїдкЯпВтСПзАжУШБЗІПЩППЕФМЦСПБЃжЄЃЌвЧЦїЕФжИЪОжЕНізїЮЊВЮПМЪ§жЕЃЌетжБНггАЯьЕНетРрЙњгЊДѓжааЭЦѓвЕЕФНкФмНЕКФЁЂОМУаЇвцЁЃвЊИФБфетжжзДПіЃЌЙиМќЕФЪЧвЊМЏжаЯжгаМИжжВтСПдРэЕФгХЕуЃЌПЫЗўЦфШБЕуЃЌДгдРэЩЯЬНЫїГівЛжжаТаЭЧПЕчжБСїДЋИаРэТлгыЗНЗЈЁЃ БОПЮЬтНЈСЂСЫвЛжжДХЪЦздЦНКтЛиРЁВЙГЅЪНжБСїДЋИаЛњРэгыЗНЗЈЁЃДХЪЦздЦНКтЛиРЁВЙГЅЪНжБСїДЋИаЛњРэгыЗНЗЈМШОпгажБСїБеЛЗВтСПдРэзМШЗЖШИпЁЂЯпадЖШКУЁЂПЙИЩШХФмСІЧПЕФгХЕуЃЌвВОпгаПЊЛЗВтСПдРэЕчТЗНсЙЙЕїЪдМђЕЅЁЂЯћГ§ДѓЙІТЪЧ§ЖЏЕФРЇЛѓЁЂЧвВЛДцдкЯЕЭГеёЕДЯђЬтЕФгХЕуЁЃетжжВтСПЗНЗЈдкдРэЩЯБэЯжСЫаТгБЕФЬиеїЃКгЩДЎСЊаЭжБСїЕчСїЛЅИаЦїЙЄзїдРэПЩжЊЃЌЭЌУћЖЫЖдНгЕФСНИіБЅКЭЕчПЙЦїдкНЛСїЕчдДЕФе§ЁЂИКАыжмФкЃЌИїздЮЌГжвЛДЮжБСїБЛВтЕчСїгыЖўДЮЕчСїжЎМфЕФДХЖЏЪЦЦНКтЃЌМДдкЦфАыИіжмЦкФкгЩвЛИіЬњаФКЭЯпШІЙЙГЩЕФвЛИіЕчПЙЦїОЭПЩвдздЖЏНЈСЂДЫЪБвЛЁЂЖўДЮжЎМфЕФжБСїДХЪЦЦНКтЁЃЕЋетжжДХЪЦЦНКтУЛгаБеЛЗЯЕЭГДХЪЦЦНКтЕФзМШЗЖШИпЃЌЮвУЧОЭгУВюжЕЕчСїВЙГЅЕФЗНЗЈЪЕЯжМьВтЬњаФЯпШІЕФжБСїСуАВдбВЙГЅЁЃДЫЪБвђвЛДЮБЛВтЕчСїДХЪЦОјДѓВПЗжвбБЛЕчПЙЦїжБНггЩНЛСїЕчдДЬсЙЉЕФЕчСїздЖЏЦНКтЕєЃЌгЩЪЃгрДХЪЦМьВтЛиРЁЕФВЙГЅЕчСїОЭКмаЁЃЌЕчзгФЃПщЕФЙІТЪаЁЃЌПЩППадИпЁЃЧвИУЛиРЁЯЕЭГЕФВЙГЅЕчСїОпгаБеЛЗЯЕЭГздЖЏИњзйВЙГЅЕФЬиадЁЃЫфШЛИУжБСїДХЪЦЦНКтЛиТЗЪЧЙЄзїдкАыИіжмЦкЕФЧщПіЯТЃЌЕЋОТЫВЈЕчИаТЫВЈКѓЃЌдйМгЩЯВюжЕЕчСїЛиРЁВЙГЅЯЕЭГВЙГЅЕФЕчСїЃЌМДПЩЕУЕНЯЃЭћЕФЕчСїЁЃ 1 ВюжЕЕчСїЛиРЁВЙГЅдРэ ДХЪЦздЦНКтЛиРЁВЙГЅЪНжБСїДЋИаЦїдРэШчЭМ1ЃЌЭМжаЃЌD1ЁЂD2ЁЂD3ЮЊЖўМЋЙмЃЛe1ЁЂe2ЮЊМЄРјЕчбЙЃЛL1ЮЊТЫВЈЕчИаЃЛUsЮЊМьВтШЦзщЕФЪфГіЕчбЙЁЃЮЊЬсИпжБСїДЋИаЦїЕФОЋЖШЃЌв§ШыВюжЕЕчСїВЙГЅЛиТЗЃЌНЋДХЪЦздЦНКтЛиТЗЪфГіАВдбI2sW2гывЛДЮБЛВтжБСїАВдбI1W2жЎВюзїЮЊВЙГЅЕчСїЛиТЗЕФЪфШыЃЌЖдДХЪЦздЦНКтЛиТЗНјааздЖЏИњзйВЙГЅЃЌгЩМьВтЬњаФC2КЭC3ЁЂМьВтШЦзщWD1КЭWD2ЁЂВЙГЅШЦзщWeЁЂВюжЕЕчСїМьВтЕЅдЊвдМАдЫЫуЗХДѓМАЧ§ЖЏЦїAЙЙГЩЕФВЙГЅЛиТЗЃЌЪЧгУгкЖдвЛЁЂЖўДЮжБСїДХЪЦжЎВюЕФИњзйВЙГЅЁЃ 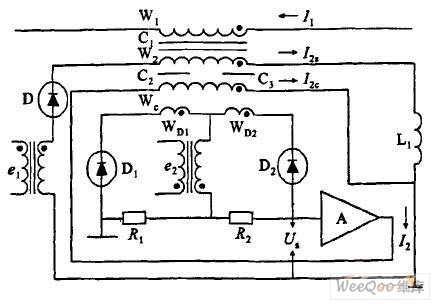 ЭМ1 ДХЪЦздЦНКтЛиРЁВЙГЅЪНжБСїДЋИаЦїдРэЭМ ЮЊБЃГжЯрЮЛЭЌВНЃЌДХЪЦздЦНКтЛиТЗгыВюжЕЕчСїВЙГЅЛиТЗЕФМЄРјЕчдДПЩВЩгУЭЌвЛИіНЛСїИЈжњЕчдДЁЃЕБВюжЕЕчСїЫљВњЩњЕФДХЖЏЪЦЮЊ0ЪБЃЌСНИіЬњаФЕФМЄДХзДЬЌЯрЭЌЃЌЦфФкВПДХЭЈвВЯрЭЌЃЌвђДЫдквЛИіжмЦкФкСНМьВтЯпШІЕФЦНОљзшПЙвВЯрЭЌЃЌЪЙЕУВюжЕВЙГЅЛиТЗЪфГіЕчбЙЮЊ0ЁЃЕБВюжЕЕчСїЫљВњЩњЕФДХЖЏЪЦ(I1W1ЃI2sW2)ЃО0ЪБЃЌдкзѓБпЕФМьВтЬњаФC2жаЃЌгЩВюжЕЕчСїВњЩњЕФДХЖЏЪЦгыМЄРјЕчСїдкМьВтЬњаФжаВњЩњЕФДХЖЏЪЦiWD1ЗДЯђЕўМгЃЌЪЙИУЬњаФжаЕФДХЭЈдЖРыБЅКЭЁЃдкгвБпЕФМьВтЬњаФC3 жаЃЌВюжЕЕчСїВњЩњЕФДХЪЦгыМЄРјЕчСїдкМьВтЬњаФжаВњЩњЕФДХЖЏЪЦiWD2ЭЌЯђЕўМгЃЌЪЙЬњаФжаЕФДХЭЈЧїгкБЅКЭЁЃгкЪЧдквЛИіжмЦкФкЃЌСНИіМьВтЬњаФЯпШІЕФЦНОљзшПЙВЛЯрЕШЃЌВЙГЅЕчТЗЪфГівЛИіЕчбЙЃЌЪфГіЕФЕчбЙОдЫЫуЗХДѓМАЧ§ЖЏЛЗНкПЩЕУЫљашЕФВЙГЅЕчСїДХЪЦI2eWeЃЌЪЕЯжЖдвЛДЮБЛВтЕчСїКЭЖўДЮЦНКтЕчСїДХЪЦВю (I1W1ЃI2sW2)ЕФВЙГЅЁЃЕБ(I1W1ЃI2sW2)ЃМ0ЪБЃЌзѓгвЬњаФЕФЙЄзїзДЬЌе§КУЯрЗДЃЌЪЙВЙГЅЕчТЗЪфГівЛИКЕчбЙЁЃ 2 ВюжЕЕчСїЛиЗпВЙГЅЯЕЭГЗНПщЭМ ЮЊСЫИќЧхГўЕиБэЪОвЛИіздЖЏПижЦЯЕЭГжаИїзщГЩЛЗНкМфЕФЯрЛЅгАЯьКЭаХКХСЊЯЕЃЌБугкЯЕЭГЕФЗжЮібаОПЃЌгУЗНПщЭМРДБэЪОПижЦЯЕЭГЕФзщГЩЁЃВюжЕЕчСїЛиРЁВЙГЅЯЕЭГЕФЗНПщЭМШчЭМ2ЫљЪОЁЃЭМ2жаЃЌK2ЮЊМьВтШЦзщЕФДЋЕнКЏЪ§ЃЛG2ЮЊЙІЗХдівцЃЛG3ЮЊВЙГЅШЦзщДЋЕнКЏЪ§ЃЛG4ЮЊЕчЕМдівцЃЛG5ЮЊВЙГЅШЦзщдівцЁЃ 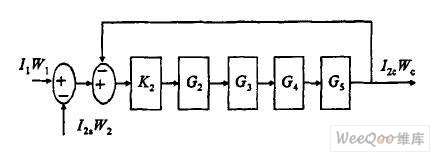 ЭМ2 ВюжЕЕчСїЛиРЁВЙГЅЯЕЭГЗНПщЭМ 2.1 ВюжЕЕчСїВЙГЅЛиТЗЕФИїМЖДЋЕнКЏЪ§ 2.1.1 МьВтШЦзщЕФДЋЕнКЏЪ§ МьВтЛиТЗЕФЪфШыЪфГіЬиадМћЭМ3ЁЃВЙГЅЛиТЗПЊЛЗЬиадЫцзХжБСїДХЪЦЕФдіМгЧїгкБЅКЭЃЌгЩгквЛДЮБЛВтжБСїДХЪЦОјДѓВПЗжБЛЖўДЮжБСїДХЪЦздЖЏЦНКтЕєЃЌЪЃгрДХЪЦКмаЁЃЌВЙГЅЛиТЗЕФПЊЛЗЬиадПЩНќЫЦПДГЩвЛЬѕЙ§дЕуЕФжБЯпЁЃвд(I1W1/W2ЃI2s)ЮЊКсзјБъxЃЌвдUЮЊзнзјБъyЃЌПЩЕУЃКyЃН0.14461xЁЃ 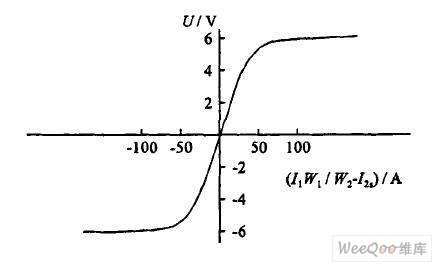 ЭМ3 МьВтЛиТЗЕФЪфШыЪфГіЬиад 2.1.2 PIDПижЦЯЕЭГ ЪфГіЕФЕчСїОЙ§дЫЫуЗХДѓМАЧ§ЖЏЛЗНкЕУЕНЫљашЕФВЙГЅЕчСїДХЪЦI2eWeЃЌдЫЫуЗХДѓЛЗНкдкздЖЏПижЦЯЕЭГжаЪєгкБШР§ПижЦЁЃБШР§ПижЦЕФзюДѓШБЕуЪЧДцдкгрВюЃЌЕБЖдПижЦжЪСПгаИќИпвЊЧѓЪБЃЌОЭашвЊдкБШР§ПижЦЛљДЁЩЯЃЌдйМгЩЯФмЯћГ§грВюЕФЛ§ЗжПижЦзїгУЁЃЮЂЗжПижЦЯЕЭГжаМДЪЙЦЋВюКмаЁЃЌжЛвЊГіЯжБфЛЏЧїЪЦЃЌОЭПЩТэЩЯНјааПижЦЃЌгаГЌЧАПижЦЕФЬиЕуЃЌвђДЫБОЮФдкВюжЕЕчСїВЙГЅЛиТЗжаВЩгУPIDПижЦЦїЁЃPIDЗДРЁЕчТЗШчЭМ4ЫљЪОЃЌЫќМШФмПьЫйНјааПижЦЃЌгжФмЯћГ§грВюЃЌОпгаНЯКУЕФПижЦадФмЁЃБШР§Л§ЗжЮЂЗжПижЦЙцТЩЮЊЃК  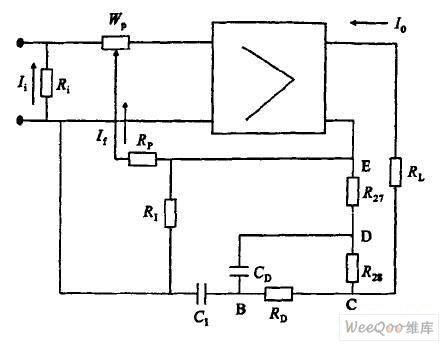 ЭМ4 PIDЗДРЁЕчТЗ PIDдЫЫуЕчТЗЕФЙЄзїЙ§ГЬШчЯТЃКЕБЪфШыаХКХIiгавЛНздОБфЛЏЪБЃЌвЛПЊЪМCDЁЂC1ЃЌЯрЕБгкЖЬТЗЃЌЪфШыаХКХЭЛЬјжСЮЂЗжзїгУзюДѓжЕЁЃМЬЖјЫцзХЖдCDЕФГфЕчЃЌИКЗДРЁЕчбЙж№НЅЩ§ИпЃЌЪфГіЕчСїI0ж№НЅЫЅМѕЯТРДЁЃгыДЫЭЌЪБЃЌCIвВБЛГфЕчЃЌЫцзХCIСНЖЫЕчбЙж№НЅдіМгЃЌИКЗДРЁзїгУж№НЅМѕаЁЃЌЪфГіЕчСїI0гжТ§Т§ЩЯЩ§ЁЃдкIi НздОзїгУЯТЃЌPIDЪфГіЬиадЧњЯпМћЭМ5ЁЃ 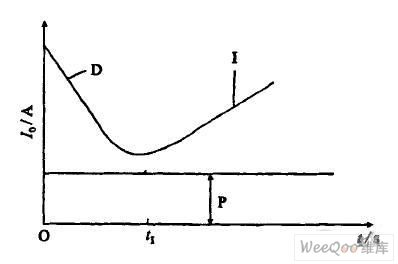 ЭМ5 PIDЕїНкЦїЪфГіЖЏЬЌЬиад PIDПижЦЦїЕФДЋЕнКЏЪ§ПЩБэЪОЮЊЃКG2(s)ЃНKP(1ЃЋ1/stI)(1ЃЋstD) ЪНжаЃЌБШР§зїгУKPЃНR2/R1ЃН10ЃЌЛ§ЗжзїгУt1ЃНR2C2ЃЌЮЂЗжзїгУtDЃНR1C1ЁЃ 2.1.3 ЗДРЁШЦзщДЋЕнКЏЪ§ ЗДРЁШЦзщЕФДЋЕнКЏЪ§гУG3БэЪОЃКG3ЃН1/(LsЃЋR)ЃНLЃН2.7418H ЪНжаЃКRЃН25ІИЃЌЮЊЗДРЁШЦзщЛиТЗзмЕчзшЃЛІЬЮЊЬњаФЕМДХТЪЃЌH/mЃЛAЮЊЬњаФНиУцЛ§ЃЌЉOЃЛlЮЊЬњаФЦНОљДХТЗГЄЖШЃЌmЃЛLЃН2.7418HЃЌЮЊЗДРЁШЦзщЕФздИаЃЛДгЮЊЗДРЁШЦзщдбЪ§ЁЃ зшПЙдівцЃКG4ЃН1/RЃН0.06ЃЌЗДРЁШЦзщЕФБШР§ЯЕЪ§ЃКG5ЃН2000ЁЃ 3 ВюжЕЕчСїЛиРЁВЙГЅЯЕЭГЕФЕТЖЈадЗжЮі ВюжЕЕчСїЛиРЁВЙГЅЯЕЭГЕФПЊЛЗДЋЕнКЏЪ§ЮЊЃК  ВюжЕВЙГЅЕчСїЛиРЁВЙГЅЯЕЭГЕФБеЛЗДЋЕнКЏЪ§ЮЊЃК  БеЛЗДЋЕнКЏЪ§ЕФЬиеїЗНГЬЮЊЃК D(s)ЃНsti(sЃЋ9.1)ЃЋ264(1ЃЋst1)ЃЋ(1ЃЋstD) ЃН(264tDt1ЃЋt1)s2ЃЋ(264(tDЃЋt1)ЃЋ9.1t1)sЃЋ264 ВюжЕЕчСїЛиРЁВЙГЅЯЕЭГЪЧвЛИіЕфаЭЕФБеЛЗЯЕЭГЁЃИљОнРюбХЦеХЕЗђЮШЖЈадРэТлЃЌЯпадЯЕЭГЮШЖЈЕФГфЗжБивЊЬѕМўЪЧБеЛЗЯЕЭГЬиеїЗНГЬЕФИљЖМОпгаИКЪЕВПЃЌМДБеЛЗДЋЕнКЏЪ§ЕФМЋЕуОљЮЛгкзјБъЦНУцзѓАыВП(ВЛАќРЈащжс)ЁЃЕЋЕБЯЕЭГНзДЮНЯИпЪБЃЌдквЛАуЧщПіЯТЃЌЧѓНтЦфЬиеїЗНГЬЛсгіЕННЯДѓЕФРЇФбЁЃРЭЫЙМАЙХЖћЮЌДФЮШЖЈХаОнЃЌПЩЭЈЙ§ЬиеїЗНГЬЕФИљгыИїЯюЯЕЪ§ЕФЙиЯЕРДХаБ№ЯЕЭГЕФЬиеїИљЪЧЗёШЋВПОпгаИКЪЕВПЃЌДгЖјЗжЮіЯпадЯЕЭГЕФЮШЖЈадЁЃ ЙХЖћЮЌДФЮШЖЈХаОнЧѓЕУЯЕЭГЮШЖЈЕФГфвЊЬѕМўЃК264tDt1ЃЋt1ЃО0Чв264(tDЃЋt1)+9.1t1ЃО0ЃЌПЩМћЃЌжЛвЊtDЃО0ЃЌt1ЃО0ЃЌЯЕЭГОЭЪЧЮШЖЈЕФЁЃ 4 Нс гя ДХЪЦздЦНКтЛиРЁВЙГЅЪНжБСїДЋИаЦїЕФДХЪЦЦНКтгЩЬњаФЕФНќЫЦОиаЮДХЛЏЧњЯпОіЖЈЁЃЦфВюжЕЕчСїВЙГЅЕчТЗЃЌдђЪЧРћгУЫЋЯђЬњаФДХЗХДѓЦїЕФЛљБОдРэЃЌдкЕчПЙЦїЬњаФЕФПеЧЛФкЩшжУСуАВдбМьВтЬњаФКЭЯпШІЃЌгУвдМьВтИУАыжмЦкФкжБСїДХЪЦЦНКтЕФАВдбВювдздЖЏИњзйВЙГЅЁЃИљОнРЭЫЙеѓСаЕФЕквЛСадЊЫиЗћКХОљЮЊе§жЕПЩХаЖЯВюжЕЛиРЁВЙГЅЯЕЭГЪЧЮШЖЈЕФЁЃ |
ЭјгбЦРТл