
CANзмЯпИєРыЦїЕФЩшМЦгыгІгУ
ЗЂВМЪБМфЃК2010-8-17 16:33
ЗЂВМепЃКlavida
|
1 в§бд CAN(Controller Area Network)ЃЌМДПижЦЦїОжгђЭјЃЌЪЧгІгУзюЙуЗКЕФЯжГЁзмЯпжЎвЛЃЌCANзмЯпвдЦфЪЕЪБадЧПЃЌПЩППадИпЃЌНсЙЙМђЕЅЃЌЛЅВйзїадКУЃЌМлИёЕЭСЎЕШгХЕуЃЌПЩгІгУгкИпЫйЭјТчКЭЕЭГЩБОЕФЯпТЗЭјТчЁЃетРяЬсГівЛжжCANзмЯпИєРыЦїЕФЭЈбЖЯЕЭГЃЌНЋЦфгІгУгкФГЗЩааЦїЕНЕиУцЕФЭЈбЖЭјТчЃЌЪЕЯжЗЩааЦїКЭЕиУцЕФЫйЖШИєРыЃЌДгЖјЪЙЗЩааЦїКЭЕиУцжЎМфФмЙЛЮШЖЈЪЕЪБЭЈаХЁЃИУЯЕЭГЩшМЦдкЗжЮіCANзмЯп2ЃЎ0BавщЕФЛљДЁЩЯЃЌВЩгУНсЙЙЛЏЗНЗЈЖРСЂЩшМЦЗЩааЦїКЭЕиУцЫЋЗНЕФЭЈаХавщЁЃЕзВуФЃПщЕФгВМўЩшМЦЪЧвдC8051F040ИпЫйаЭЕЅЦЌЛњЮЊКЫаФЃЌЦфФкВПМЏГЩCANавщПижЦЦїЃЌвђЖјжЛашдіМгCANЪеЗЂЦїОЭПЩЪЕЯжCANжЧФмНкЕуЩшМЦЃЌБШДЋЭГЕФгЩЕЅЦЌЛњгыCANавщПижЦЦїЙВЭЌзщГЩЕФCANНкЕуИќМђЕЅЃЌПЩППЃЌвзВйзїЁЃЖјCANзмЯпгІгУВуавщгЩгУЛЇздааЖЈвхБраДЃЌЪЙЦфИќЗћКЯИУЯЕЭГЩшМЦвЊЧѓЁЃФПЧАећИіЯЕЭГдЫааСМКУЃЌадФмЮШЖЈЃЌЭЈаХШпгрЖШКУЃЌЗћКЯЙЄвЕЯжГЁЪЙгУвЊЧѓЁЃ 2 ЛљгкC8051F040ЕФCANжЧФмНкЕуЩшМЦ ЭМ1ЪЧЛљгкC8051F040ЕФCANзмЯпгВМўНгПкдРэЕчТЗЭМЁЃЭЈЙ§C8051F040ФкВПЫљМЏГЩЕФCANПижЦЦїЃЌЮЊСЫдіЧПЯЕЭГЕФПЙЪЎШХФмСІЃЌдкCANПижЦЦїгыTJA1040жЎМфНгШыЙтЕчёюКЯЦї6N137ЃЌДгЖјЪЕЯжTJA1040гыЭтНчCANЭЈаХЁЃЪТЪЕЩЯЃЌМЏГЩЪеЗЂЦїTJA1040БОЩэОпгаЫВМфПЙИЩШХФмСІЃЌПЩБЃЛЄзмЯпЃЌНЕЕЭЩфЦЕИЩШХЃЌвдЪЕЯжШШБЃЛЄЙІФмЁЃвђДЫЃЌдкИЩШХВЛбЯжиЕФРШгУГЁКЯЃЌЮоашдіМгЙтЕчИєРыЃЌЪЙЕУЯЕЭГДяЕНзюДѓЭЈаХЫйТЪЛђОрРыЁЃШчЙћЪЙгУЙтЕчИєРыЦїЃЌгІОЁСПбЁгУИпЫйЙтЕчИєРыЦїЃЌвдМѕЩйCANзмЯпгааЇЛиТЗаХКХДЋЪфЕФбгЪБЪБМфЁЃгЩгкCANИєРыЦїашЭЈЙ§CANзмЯпВЩМЏЪфШыЪфГіФЃПщЕФЪ§ОнаХЯЂЃЌИЩШХНЯДѓЃЌЮЊСЫЯЕЭГЕФЮШЖЈПЩППадЃЌашМгЙтЕчИєРыЦїЁЃЭЈЙ§CAN2ЃЎ0BМцШнCAN2ЃЎ0AавщЕФСЌНгЭЈбЖВтЪдЃЌЙтЕчёюКЯЦї6N137ЩЯЩ§ЪБМфЮЊ30 ns(ЕфаЭжЕ)ЃЌИєРыЕчбЙЮЊ3 000 VЃЌЦфжЇГжзюДѓЦЕТЪжЕГЌЙ§30 MHzЁЃ 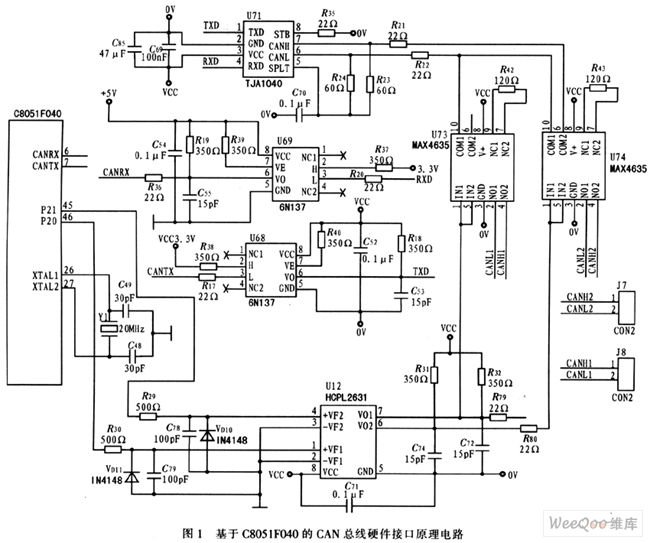 ЮЊЪЕЯжЯЕЭГЕФЮШЖЈПЩППадЃЌИУЯЕЭГЩшМЦВЩгУШпгрЩшМЦЃЌРћгУЫЋЭЈЕРЙтёюHCPL2631ИєРыВЂВњЩњПижЦаХКХЃЌПижЦСНИіЕЅЕЖЫЋжРПЊЙиMAX4635ЃЌДгЖјЪЕЯжCANжЧФмНкЕуЕФЧаЛЛЁЃ 3 CANзмЯпИєРыЦїЩшМЦ ИУЯЕЭГЩшМЦЕФCANзмЯпИєРыжївЊгЩЗЂЫЭКЭНгЪеСНВПЗжзщГЩЁЃЗЂЫЭКЭНгЪеВПЗжЖМгЩЪ§ОнжИСюХфжУЁЂЪ§ОнДІРэКЭЪ§ОнДЋЪф3ИіЕЅдЊзщГЩЃЌШчЭМ2ЫљЪОЁЃЦфжаЗЂЫЭВПЗжЃКЩЯЮЛЛњжИСюХфжУЭъКѓЃЌЭЈЙ§FPGAДЋЪфИјЕЅЦЌЛњЃЌЕЅЦЌЛњРћгУздЩэЫљДјЕФCANзмЯпЃЌОИєРыДІРэКѓЕНДязмЯпЧ§ЖЏЦїЃЌШЛКѓЭЈЙ§CANзмЯпЪфГіЪ§ОнЁЃЖјНгЪеВПЗже§КУЯрЗДЁЃИУЯЕЭГЩшМЦНЋЗЩааЦїЫйЖШЩшжУЮЊ500 kHzЃЌЕиУцЫйЖШЩшжУЮЊ50 kmЃЏsЃЌДгЖјИќКУФЃФтЗЩааЦїКЭЕиУцЕФЭЈаХЁЃ 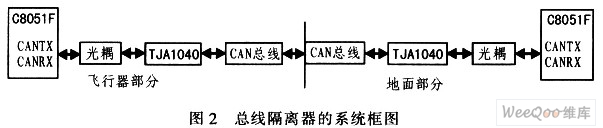 4 ИєРыЦїЪеЗЂЫЋЗНЭЈаХавщ змЯпИєРыЦїЗжЮЊЗЩааЦїИпЫйНгПкКЭЕиУцЕЭЫйНгПкСНВПЗжЃЌвЊЧѓИєРыЦїФмЭЈЙ§ЫљгаЕиУцЩЯааЕНЗЩааЦїЕФЪ§ОнЁЃБОЯЕЭГCANзмЯпВЩгУжїДгЗНЪНЃЌЫљгазмЯпЪ§ОнЭГвЛВЩгУЪ§ОнжЁЃЌВЛгУдЖГЬжЁЃЌЪ§ОнГЄЖШзюДѓЮЊ8зжНкЃЌзюаЁЮЊ0зжНкЁЃИљОнЪ§ОнСДТЗВуавщЃЌжйВУГЁБъзМБъЪЖЗћЙВ11ЮЛ(ID1O"ID0)ЃЌЯЕЭГЭЈЙ§БъЪЖЗћШЗЖЈЪ§ОнДЋЪфЕФгХЯШМЖЁЃБОавщЙцЖЈЃЌIDГ§БэЪОгХЯШМЖЭтЃЌЛЙЪЧЪ§ОнНгЪеФПЕФНкЕуЁЂЪ§ОнЗЂЫЭдДНкЕугыЪ§ОнРраЭЁЃОпЬхЫЕУї11ЮЛIDЃКID(IDЕФ0ЁЋ3ЮЛ)ЮЊЪ§ОнНгЪеФПЕФНкЕуЃЛID(IDЕФ4"7ЮЛ)ЮЊЪ§ОнЗЂЫЭЕФдДНкЕуЃЛID(IDЕФ8"10ЮЛ)ЮЊЪ§ОнРраЭЁЃ БОавщжаЃЌЗЩааЦїЯЕЭГКЭЕиУцЯЕЭГЖМга3ИіНкЕуЃЌНкЕуБрКХКЭIDКХШчБэ1ЫљЪОЁЃ 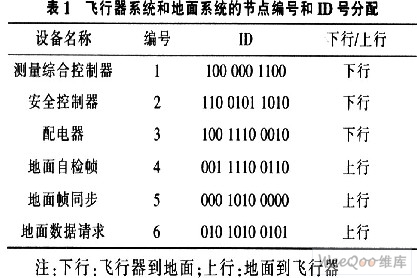 5 CANИєРыЦїЕФШэМўЩшМЦ 5ЃЎ1 CANзмЯпГѕЪМЛЏ CANзмЯпГѕЪМЛЏАќРЈЃКIЃЏOЕФХфжУЁЂЭтВПОЇЬхеёЕДЦїЕФХфжУЁЂCANзмЯпЕФПЊБеЁЂЗЂЫЭКЭНгЪеГѕЪМЛЏЁЃГѕЪМЛЏГЬађШчЯТЃК void initial_can(unsigned char MsgNumЃЌunsignedl int id) {SFRPAGE=CONFIG_PAGEЃЛ 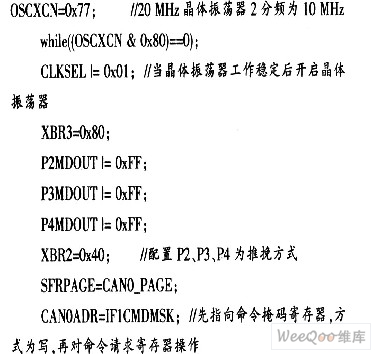 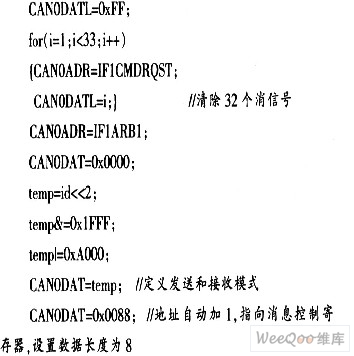 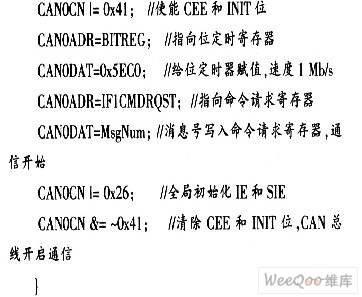 5ЃЎ2 ЗЂЫЭКЭНгЪеГЬађ CANБЈЮФЗЂЫЭЪЧгЩCANПижЦЦїздЖЏЭъГЩЃЌгУЛЇжЛашИљОнНгЪеЕНЕФЪ§ОнжЁЕФЪЖБ№ЗћЃЌНЋЖдгІЕФЪ§ОнзЊвЦЕНЗЂЫЭЛКГхМФДцЦїЃЌШЛКѓНЋДЫБЈЮФЖдЯѓЕФБрТыаДШыУќСюЧыЧѓМФДцЦїЦєЖЏЗЂЫЭМДПЩЃЌЖјЗЂЫЭгЩгВМўЭъГЩЁЃетРяЪЙгУЖЈЪБИќаТЗЂЫЭБЈЮФЖдЯѓжаЕФЪ§ОнЃЌЗЂЫЭЪ§ОнгЩПижЦЦїздЖЏЭъГЩЃЌЕБЪеЕНвЛИіЪ§ОнжЁЪБЃЌПЩНЋОпгаЯрЭЌЪЖБ№ЗћЕФЪ§ОнжЁЗЂЫЭГіШЅЁЃЦфЗЂЫЭГЬађДњТыШчЯТЃК 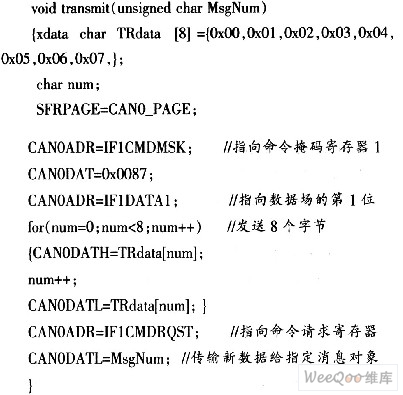 CANБЈЮФЕФНгЪегыЗЂЫЭЯрЭЌЃЌгЩCANПижЦЦїздЖЏЭъГЩЃЌНгЪеГЬађжЛашДгНгЪеЛКДцЦїжаЖСШЁЫљНгЪеЕФЪ§ОнЃЌдйНјааЯргІДІРэЁЃЦфЗНЗЈгыЗЂЫЭГЬађЛљБОвЛжТЃЌетРяВЛдйзИЪіЁЃ 6 ЙиМќММЪѕЩшМЦЗжЮі 6ЃЎ1 ШпгрЩшМЦ ЙЄвЕПижЦЯжГЁзДПіИДдгЃЌвђЭтСІЫљжТЕФЕчРТНгДЅЙЪеЯТЪдЖдЖИпгкНкЕуЕФЙЪеЯТЪЃЌвЛЕЉЕчРТЗЂЩњЙЪеЯЃЌзмЯпОЭЛсЪЇШЅЭЈаХФмСІЃЌВЂЕМжТЯЕЭГЬБЛОЃЌЖдЙЄПиЯЕЭГЕФНЁзГадЙЙГЩЭўаВЁЃНтОіетвЛЙЪеЯзюМђЕЅЁЂгааЇЕФАьЗЈЪЧЖдЙЪеЯТЪНЯИпЕФЮяРэНщжЪНјааШпгрЩшМЦЁЃМДЪЙгУ2ЬѕзмЯпЕчРТЁЂ2ИіCANзмЯпЪеЗЂЦїЃЌЕЋжЛгУ1ИізмЯпПижЦЦїЁЃжйВУЕчТЗздЖЏМрВтзмЯпзДЬЌЃЌВЂздЪЪгІбЁдёе§ГЃЕФЕчРТЭъГЩЭЈаХШЮЮёЁЃЗЂЩњЕчРТЙЪеЯЪБЃЌЩшБИздЖЏБЈОЏЃЌЬсабЙЄзїШЫдБНјааМьаоЁЃМьаоЙ§ГЬжаЃЌЩшБИЪЙгУБИгУЕчРТМЬајЙЄзїЁЃЕчРТШпгрЩшМЦПЩЪЕЯжгыЭЈГЃЕФCANзмЯпЭЈбЖЯЕЭГДњТыМЖМцШнЁЃжйВУЕчТЗЩшжУгкзмЯпПижЦЦїгы2ИізмЯпЪеЗЂЦїжЎМфЃЌМрВтCANзмЯпЕчРТзДЬЌЃЌЪЕЯжздЪЪгІЧаЛЛКЭБЈОЏЁЃЩшБИЯђЦфЫћНкЕуЗЂЫЭБЈЮФЪБЃЌзмЯпПижЦЦїЯђ2ЬѕзмЯпЭЌЪБЗЂЫЭЯрЭЌЕФБЈЮФЃЛЖјНгЪеБЈЮФЪБЃЌжйВУЕчТЗдкЮоЕчРТЙЪеЯЪБЃЌвЛжБЪЙгУзмЯп1(жїзмЯп)НјааБЈЮФНгЪеЁЃШчЙћзмЯп2(ДгзмЯп)ГіЯжЙЪеЯЃЌЙЪеЯМрВтЕчТЗОЭЯђжїПиМЦЫуЛњЗЂГіжаЖЯаХКХБЈЙЪеЯЃЌЭЌЪБДІгке§ГЃзДЬЌЕФзмЯп1ШдГаЕЃе§ГЃЭЈбЖШЮЮёЃЛШчЙћзмЯп1ГіЯжЙЪеЯЃЌЙЪеЯМрВтЕчТЗдкЯђжїПиМЦЫуЛњЗЂГіжаЖЯаХКХЕФЭЌЪБЃЌздЖЏЧаЛЛГЩзмЯп2ЃЌвдБЃжЄЩшБИе§ГЃЙЄзїЁЃзмЯпЧаЛЛЖЏзїжЛЛсГіЯждке§дкЪЙгУЕФЕчРТЗЂЩњЙЪеЯЪБЃЌетбљПЩЬсИпЭЈбЖЕФЮШЖЈадЃЌНЕЕЭгІД№ЪЇАмЕФМИТЪЁЃ 6ЃЎ2 НгЪеЪ§ОнЪБIDВЛТЫВЈЕФЪЕЯж дкCANзмЯпЕФНгЪеЙ§ГЬжаЃЌвЛАуЪЕЯжЕФЖМЪЧЗЂЫЭIDКЭНгЪеIDЯрЦЅХфЕФЗНЪНЃЌвВОЭЪЧЫЕдкНгЪеЗНвЊНјааНгЪеЃЌЖјIDТЫВЈЃЌЖјБОЩшМЦЪЕЯжШЮвтНгЪеЗНЪНЃЌжЛвЊгаЪ§ОнОЭПЊЪМНгЪеВЛНјааIDКХЕФТЫВЈЃЌетбљПЩИќКУНјааВтЪдЃЌР§ШчФГИіЩшБИЫљаЏДјЕФIDКХЃЌгЩгкИїжждвђгыНгЪеЗНЫљНгЪеЕФIDВЛЦЅХфЃЌетбљОЭПЩХаЖЯГіЫљЗЂЩшБИПЩФмЪеЕНИЩШХЃЌЛђепЫљЗЂЩшБИздЩэГіЯжСЫЮЪЬтЁЃетжжIDКХВЛЙ§ТЫЕФЗНЗЈжївЊЭЈЙ§ЖдНгЪеЩшБИЕФУќСюЧыЧѓМФДцЦїЁЂЯћЯЂбкТыМФДцЦїЁЂжйВУМФДцЦїЁЂЯћЯЂПижЦМФДцЦїКЭУќСюбкТыМФДцЦїЕФЩшжУРДЪЕЯжЁЃЦфЪЕЯжГЬађШчЯТЃК 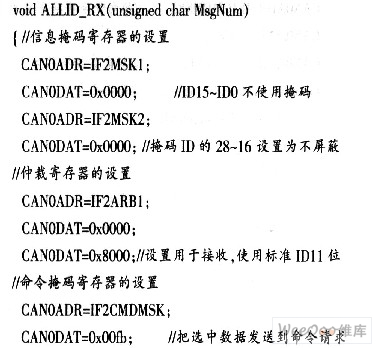  7 НсТл БОЮФЬсГівЛжжCANзмЯпИєРыЦїЕФЪЕЯжЗНАИЁЃРћгУОпгаCANзмЯпПижЦЦїЕФC8051FЯЕСаЕЅЦЌЛњЪЕЯжСЫCANжЧФмНкЕуЃЌдіМгCANНкЕуЕФШпгрЩшМЦЃЌЬсИпЭЈбЖЕФЮШЖЈадЃЌНЕЕЭгІД№ЪЇАмЕФМИТЪЃЛЪЕЯжВЛТЫВЈЕФCANЪ§ОнНгЪеЃЌПЩИќКУВтЪдЯЕЭГЕФПЩППадКЭМрВтЙІФмЃЌЕБНгЪеЕНВЛЪЧвбжЊЩшБИЗЂРДЕФЯћЯЂЪБЃЌФмЙЛзМШЗЖЈЮЛЩшБИЙЪеЯЕФЮЛжУЁЃДЫЗНАИЪЕЯжЕФCANзмЯпИєРыЦївбГЩЙІгІгУгкФГаЭКХЗЩааЦїЕФЕиУцВтЪдЬЈжаЃЌОВтЪдКЭЕїЪдКѓЃЌЯЕЭГЙЄзїЮШЖЈЃЌДяЕНЩшМЦвЊЧѓЁЃВЂЧвгЩгкВЩгУФкЧЖЕФCANзмЯпПижЦЦїЃЌПЩЮЊвдКѓЕФЯЕЭГЩ§МЖдЄСєДѓСППеМфЁЃ |
ЭјгбЦРТл