
ЛљгкІЬC/OS-IIЕФЕчЖЏГЕЕчГиЙмРэЯЕЭГЩшМЦ
ЗЂВМЪБМфЃК2010-8-4 12:30
ЗЂВМепЃКlavida
|
ЕчГиЙмРэЯЕЭГBMS(Battery Management System)ЪЧЕчЖЏЦћГЕЕФвЛЯюЙиМќММЪѕЁЃИпадФмЁЂИпПЩППадЕФЕчГиЙмРэЯЕЭГФмЪЙЕчГидкИїжжЙЄзїЬѕМўЯТЛёЕУзюМбЕФадФмЁЃЕчГиЙмРэЯЕЭГПЩЪЕЪБМрВтЕчГизДЬЌЃЌШчЕчГиЕчбЙЁЂГфЗХЕчЕчСїЁЂЪЙгУЮТЖШЕШЃЛдЄВтЕчГиКЩЕчзДЬЌ(State of charge)ЃЌЗРжЙЕчГиЙ§ГфЙ§ЗХЃЌДгЖјДяЕНЬсЩ§ЕчГиЪЙгУадФмКЭЪйУќЃЌЬсИпЛьКЯЖЏСІЦћГЕЕФПЩППадКЭАВШЋадЕФФПЕФЁЃБОУЛМЦвдDSPКЭCPLDЮЊжїЬхЃЌЙЙНЈЕчГиЙмРэЯЕЭГЕФгВМўЦНЬЈЃЌВЂдкDSPФкВПЧЖШыІЬC/OS-IIЪЕЪБВйзїЯЕЭГЃЌПЩДѓДѓЬсИпЯЕЭГЕФЮШЖЈадКЭЪЕЪБЯьгІФмСІЃЌдіЧПЯЕЭГЕФПЩРЉеЙадКЭПЩвЦжВадЁЃ 1 гВМўЯЕЭГЩшМЦ 1ЃЎ1 МЏжаЪНЕчГиЙмРэЯЕЭГНсЙЙ ЛьКЯЖЏСІЕчЖЏЦћГЕHEV(Hybrid Electric Vehicle)вЊЧѓЕФГЕдиЖЏСІЕчГизмЕчбЙвЛАуБШНЯИпЃЌЕчГиНкЪ§НЯЖрЁЃБОЩшМЦЫљЩцМАЕФФјЧтЖЏСІЕчГизщЪЧгЩ270ИіЕчГиЕЅЬхзщГЩЕФЃЌУПИіЕЅЬхПЩЬсЙЉ1ЃЎ2VзѓгвЕчбЙЁЃЦфжаУП10ИіЕЅЬхдЊзщГЩвЛИіФЃПщЃЌЙВга27ИіЕчГиФЃПщЃЌзмЖюЖЈЕчбЙЮЊ324VЁЃ ВЩгУМЏжаЪНЕчГиЙмРэЯЕЭГНсЙЙЪЧНЋЕчГиаХЯЂВтСПгыВЩбљФЃПщКЭжїПиФЃПщМЏжадквЛЦ№ЃЌЭЈЙ§ЩшМЦЖрТЗПижЦбЁдёПЊЙиЗжЪБЭъГЩЪ§ОнВЩМЏЁЃетжжЩшМЦЗНЗЈОпгаЕчТЗМђЕЅЁЂГЩБОЕЭЁЂЬхЛ§аЁЕФЬиЕуЁЃЩшМЦЕФЕчГиЙмРэЯЕЭГЛљБОНсЙЙЪОвтЭМШчЭМ1ЫљЪОЁЃ 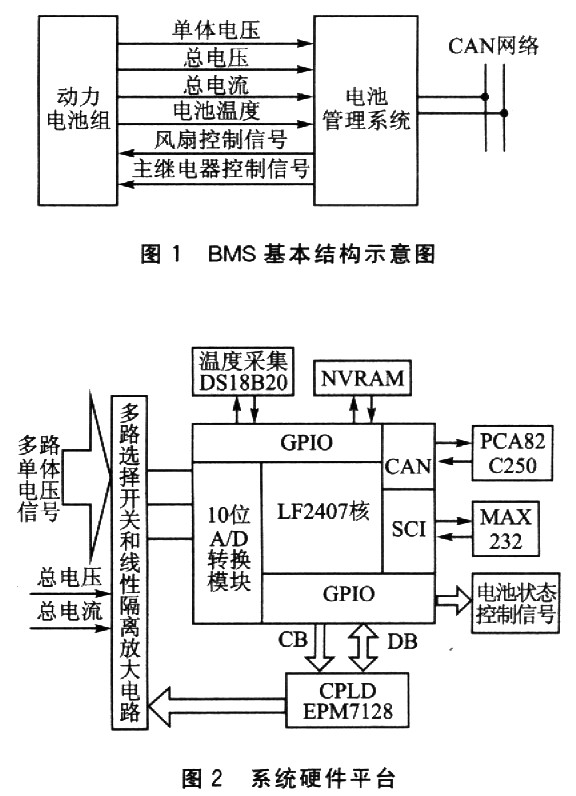 1ЃЎ2 ЕчГиЙмРэЯЕЭГЕФгВМўЗНАИ ЭМ2ЮЊЯЕЭГгВМўЦНЬЈЁЃбЁгУTIЙЋЫОЕФTMS240LF2407(МђГЦЮЊЁАLF2407ЁБ)зїЮЊЯЕЭГЕФCPUЁЃЦфКЫаФВЩгУЙўЗ№НсЙЙЃЌОпгазЈУХЕФгВМўГЫЗЈЦїЃЛЙуЗКВЩгУСїЫЎЯпВйзїЃЌПЩгУРДЪЕЯжПьЫйЕФЪ§зжаХКХДІРэЫуЗЈЃЌгажњгкЬсИпМЦЫуЕчГиSoCжЕЕФЫйЖШКЭОЋЖШЃЛЭЌЪБЃЌЦЌЩЯМЏГЩСЫЗсИЛЕФЭтЩш(ШчA/DзЊЛЛЦїЁЂSCIФЃПщКЭCANЭјТчПижЦЦїЕШ)ЃЌПЩвдГфЗжЗЂЛгЦфзЪдДгХЪЦЁЃ ЕЅЬхЕчбЙЁЂзмЕчбЙКЭзмЕчСїЕФВЩМЏЃЌОљвдCPLDЮЊКЫаФЃЌЭЈЙ§вЛЖЈЕФТпМПижЦЃЌПижЦЙтЕчПЊЙиЙЬЬЌМЬЕчЦїеѓСаЗжЪБЕМЭЈЃЌНЋВЩбљаХКХОЙ§ИєРыЗХДѓТЫВЈКѓЫЭШыDSPЕФA/DзЊЛЛФЃПщжаЁЃCPLDНгЪегЩDSPЗЂГіЕФТпМПижЦЪБађЃЌПижЦЯргІЕФЙЬЬЌМЬЕчЦїжДааЕМЭЈКЭЙиЖЯЖЏзїЃЌЗжЪБЕиНЋИїИіФЃФтСПЕМШыA/DзЊЛЛФЃПщжаЁЃПМТЧЕНЕчГизщзмЕчбЙБШНЯИпЃЌЭЌЪБФИЯпЕчСїЕФВЈЖЏЗљжЕБШНЯДѓЃЌВЈЖЏЦЕТЪНЯПьЃЌЗжБ№бЁгУСЫОЋЖШНЯИпЁЂЯьгІНЯПьЕФЛєЖћЕчбЙКЭЕчСїДЋИаЦїЃЌвдЪЪгІВЩМЏвЊЧѓЁЃ ЕчГизщЮТЖШЕФВЩМЏВЩгУЕЅзмЯпЕФЗНЪНЃЌДЋИаЦїбЁгУDSl8820ЃЌЙВЩшжУ8ИіЮТЖШЕФВЩМЏЕуЁЃЕЅзмЯпЪЧФПЧАРЉеЙзюЗНБуЕФзмЯпжЎвЛЃЌОпгаНкЪЁIЃЏOПкЯпзЪдДЁЂНсЙЙМђЕЅЁЂГЩБОЕЭСЎЃЌБугкзмЯпРЉеЙКЭЮЌЛЄЕШжюЖргХЕуЁЃгЩгкDS18820жБНгЬсЙЉВтСПЮТЖШЕФЪ§зжаХКХЃЌЙЪПЩвджБНгЭЈЙ§DSPЩЯЕФЭЈгУI/OгыЦфЭЈаХЁЃ дкDSPЕФЭЈгУI/OЩЯРЉеЙСЫЗЧвзЪЇадДцДЂЦїNVRAMПеМфЃЌФПЕФЪЧБЃДцживЊЕФЕчГиРњЪЗЪ§ОнЃЌЮЊМЦЫуКЭаое§ЕчГиЕФSoCвдМАЗжЮіЕчГиГфЗХЕчзДЬЌЬсЙЉПЩППЕФвРОнЁЃ LF2407ЬсЙЉЕФCANЭЈаХФЃПщЗћКЯCAN2ЃЎ0ЕФЙцИёвЊЧѓЃЌбЁгУЗЩРћЦжЙЋЫОЕФCANЭЈаХЪеЗЂЦїPCA82C250зїЮЊDSPЕФCANПижЦЦїКЭЮяРэзмЯпМфНгПкЃЌвдЪЕЯжЕчГиЙмРэЯЕЭГгыећГЕжЎМфЕФЭЈаХЃЛЭЌЪБЃЌРЉеЙDSPЦЌЩЯЕФSCIФЃПщЃЌЪЕЯжгыЩЯЮЛPCМфЕФЭЈаХЙІФмЁЃ 1ЃЎ3 гВМўПЙИЩШХДыЪЉ ЕчГиЙмРэЯЕЭГзїЮЊећГЕЕФвЛВПЗжЃЌОГЃЪмЕНИїжжЕчДХИЩШХЁЃЦфЪЕМЪЕФЙЄзїЛЗОГЪЧБШНЯЖёСгЕФЃЌгаБивЊдкгВМўЩшМЦЩЯВЩШЁвЛЖЈЕФПЙИЩШХДыЪЉЁЃ ЂйвжжЦИЩШХдДЁЃЛьКЯЖЏСІЕчЖЏЦћГЕЩЯЕчЛњЩшБИжаЕФIGBTКЭЙІТЪЖўМЋЙмЙЄзїЪБЃЌЛсВњЩњКмЧПЕФЕчДХИЩШХЃЌгШЦфЪЧЙВФЃИЩШХНЯЮЊбЯжиЁЃвђДЫгаБивЊдкЕчГизщгыећГЕжЎМфСЌНгИпЦЕХдТЗЕчШнЁЃ ЂкИєРыЙЉЕчЁЃгЩгкжкЖрЕФЭтВПгадДКЭЮодДаХКХЛсЖдЯЕЭГЕчдДВњЩњбЯжиИЩШХЃЌвђДЫдкЕчГиЙмРэЯЕЭГЕФЩшМЦжаВЩгУDC/DCБфЛЛФЃПщЃЌЬсЙЉЮШЖЈЕФИєРыЕчдДЃЌЖдВЛЭЌзгЯЕЭГЗжБ№ЙЉЕчЃЌПЩвдгааЇЕиЯћГ§ЕчдДИЩШХКЭЙВЕиВњЩњЕФИЩШХЁЃ ЂлЙтЕчИєРыЁЃдкЕчГиЙмРэЯЕЭГЕФЩшМЦжаЃЌВЩгУЙтЕчёюКЯЦї6N137НЋЭтВПЭЈаХНгПк(CANЭЈаХЁЂRS232ЭЈаХ)гыФкВПCPUЕчТЗИєРыПЊРДЃЌПЩвдзшжЙЕчТЗадёюКЯВњЩњЕФЕчДХИЩШХЁЃ 2 ШэМўЯЕЭГЩшМЦ ШэМўЯЕЭГЩшМЦАќРЈЯЕЭГШэМўЩшМЦКЭгІгУШэМўЩшМЦЁЃЯЕЭГШэМўЩшМЦЕФжївЊШЮЮёЪЧЪЕЯжІЬCЃЏOS-IIдкLF2407ЩЯЕФвЦжВЃЛгІгУШэМўЩшМЦЕФжївЊШЮЮёЪЧЯЕЭГЙІФмЕФЪЕЯжЁЃ 2.1 ЯЕЭГШэМўЩшМЦ 2.1.1 ІЬCЃЏOS-IIМђНщ ІЬC/OS-IIЪЧгЩУРЙњШЫJean LabrosseБраДЕФвЛИіЧЖШыЪНЪЕЪБВйзїЯЕЭГФкКЫЁЃЫќЪЧвЛИіЛљгкгХЯШМЖЕФЁЂПЩвЦжВЁЂПЩЙЬЛЏЁЂПЩВУМєЁЂеМЯШЪНЪЕЪБВйзїЯЕЭГЃЌЦфОјДѓВПЗждДТыЪЧгУANSI CБраДЕФЁЃІЬC/OS-IIжЇГж56ИігУЛЇШЮЮёЃЌжЇГжаХКХСПЁЂЯћЯЂгЪЯфЁЂЯћЯЂЖгСаЕШЖржжГЃгУЕФНјГЬМфЭЈаХЛњжЦЃЌЯжвбГЩЙІгІгУЕНжкЖрЩЬвЕЧЖШыЪНЯЕЭГжаЃЌЦфЮШЖЈадгыПЩППадвбОЕУЕНМьбщЁЃ 2.1.2 ІЬCЃЏOS-IIдкTMS320LF2407ЩЯЕФвЦжВ LF2407ТњзуІЬC/OS-IIвЦжВЕФЬѕМўЁЃTIЙЋЫОЬсЙЉЕФБрвыШэМўCCSвВжЇГжCгябдгыЛуБргябдЛьКЯБрГЬЁЃвЊЭъГЩвЦжВЕФЙЄзїашвЊНјаавдЯТ4ИіФкШнЃК ЁѓдкOS_CPUЃЎHжаЖЈвхгыДІРэЦїЯрЙиЕФГЃСПЁЂКъМАЪ§ОнРраЭЁЃ ЁѓЕїећКЭаоИФЭЗЮФМўOS_CFGЃЎHЃЌвдВУМѕЛђаоИФІЬCЃЏOS-IIЕФЯЕЭГЗўЮёЃЌМѕЩйзЪдДЫ№КФЁЃ ЁѓБраДCгябдЮФМўOS_CPUЃЎCЁЃ ЁѓБраДЛуБргябдЮФМўOS_CPUЃЎASMЁЃ ЩЯЪіЙЄзїЭъГЩКѓЃЌІЬC/OS-IIОЭПЩвддЫааСЫЁЃ 2.2 гІгУШэМўЩшМЦ 2ЃЎ2ЃЎ1 ЯЕЭГЖрШЮЮёЙІФмКЭгХЯШМЖЩшМЦ ИљОнЕчГиЙмРэЯЕЭГЕФЙІФмвЊЧѓЃЌНЋЯЕЭГЗжЮЊЕчбЙЕчСїВЩМЏДІРэФЃПщЁЂЮТЖШВЩМЏФЃПщЁЂЭЈаХФЃПщЁЂЯЕЭГМрЪгФЃПщКЭSoCМЦЫуФЃПщЕШЙВ8ИіШЮЮёКЭ5ИіжаЖЯРДЪЕЯжЁЃУПИіШЮЮёИљОнЦфЪЕЪБадЕФвЊЧѓВЂВЮееЕЅЕїжДааТЪЕїЖШЗЈRMSЗжХфвЛЖЈЕФгХЯШМЖЁЃШЮЮёМАжаЖЯЕФЖЈвхЗжБ№ШчБэ1ЁЂБэ2ЫљСаЁЃ  ИљОнећГЕПижЦВпТдЃЌCANЩЯЕчГизДЬЌЪ§ОнУПжЁЕФЫЂаТжмЦкЮЊ20msЃЌЙЪЩшжУВйзїЯЕЭГЪБжгНкХФЮЊ20msЃЛЯргІЕиЩшжУADProsTask()ЁЂCANTXDTask()ЁЂSOCTask()КЭMoniTask()ЕФжДаажмЦкОљЮЊ20 msЃЛПМТЧЕНЕчГизщЕФЮТЖШБфЛЏЯрЖдНЯТ§ЃЌЭЌЪБЮТЖШДЋИаЦїDS18820ЕФЮТЖШзЊЛЛЪБМфЯрЖдНЯГЄЃЌЩшжУTempTask()ЕФжДаажмЦкЮЊ100msЃЛCANRXDTask()КЭSCIRXDTask()ЕФжДааВЩгУжаЖЯДЅЗЂЗНЪНЃЛSCITXDTask()гЩЩЯЮЛЛњЕФЦєЖЏКЭЭЃжЙаХКХПижЦжДааЃЌжДаажмЦкЮЊ40 msЁЃ гІгУШэМўЩшМЦЕФФбЕудкгкЃЌПЩППЕиЩшМЦЙЬЬЌМЬЕчЦїеѓСа(TLP296)ЕФЪБађТпМЁЃгЩгкTLP296ДцдкзюДѓ4msЕФДђПЊКЭЙиЖЯЪБМфЃЌвђДЫБиаыЩшМЦЫРЧјЪБМфЃЌвдШЗБЃдкВЩМЏЕчГиФЃПщЕчбЙЪБЃЌЕчГиВЛЛсЗЂЩњЖЬТЗЃЛЭЌЪБЛЙвЊБЃжЄдкA/DзЊЛЛжЎЧАЃЌВЩбљЭЈЕР(МДЯргІЕФTLP296)ЭъШЋДђПЊЁЃЫљвдРћгУСЫDSPЕФTimerlЯТвчжаЖЯХфКЯЯЕЭГЪБжгжмЦкРДгааЇЕиПижЦCPLDЕФЪБађЁЃећЬхЙЄзїЕФЪБађТпМШчЭМ3ЫљЪОЁЃ  2.2.2 ШЮЮёМфЕФЭЈаХгыЭЌВН ІЬC/OS-IIЬсЙЉСЫ5жжгУгкЪ§ОнЙВЯэКЭШЮЮёЭЈаХЕФЗНЗЈЃКаХКХСПЁЂгЪЯфЁЂЯћЯЂЖгСаЁЂЪТМўБъжОМАЛЅГтаЭаХКХСПЁЃЮЊСЫМѕЩйВйзїЯЕЭГЕФПЊжЇЃЌдкЕчГиЙмРэЯЕЭГгІгУШэМўЩшМЦжажЛРћгУСЫЦфжаЕФгЪЯфзїЮЊШЮЮёМфЕФЭЈаХЪжЖЮЃЌШчЭМ4ЫљЪОЁЃ 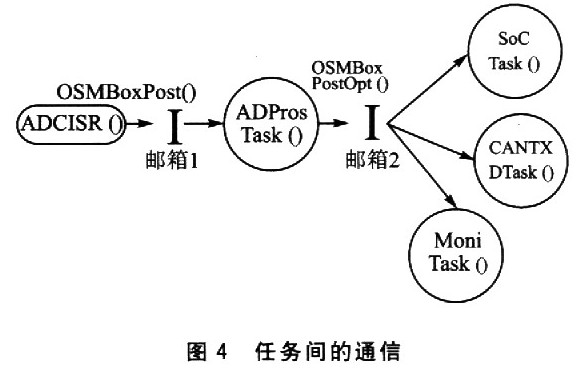 ЕчГиЙмРэЯЕЭГЕФКЫаФЪЧвдЪ§ОнВЩМЏЮЊЛљДЁЕФЃЌЫљвдADProsTask()ЪЧЦфЫћШЮЮёЕФЧАЬсЁЃЭЈЙ§ADCжаЖЯЯђгЪЯф1ЗЂЯћЯЂОЭаїADProsTask()ЃЌД§ЦфжДааЭъКѓЯргІЕФЪ§ОнБЃДцКЭДІРэКѓЯђгЪЯф2ЗЂЯћЯЂОЭаїЦфЫћЕШД§Ъ§ОнЕФШЮЮёЃЌЦфЫћШЮЮёАДеегХЯШМЖвРДЮжДааЃЛЮТЖШВЩМЏКЭДІРэЕФШЮЮёЖРСЂНјааЃЛCANНгЪеШЮЮёКЭSCIШЮЮёЪЧдкЯргІЕФгЪЯфжаЕУЕНЯћЯЂКѓжДааЃЌЯћЯЂвВЪЧгЩЯргІЕФжаЖЯЗўЮёГЬађЗЂГіЁЃ Нсгя ЕчГиЙмРэЯЕЭГВЩгУСЫDSP+CPLDЕФНсЙЙЃЌМгжЎЯргІЕФПЙИЩШХДыЪЉЃЌОпгаадФмИпЁЂПЩППадЧПЕФЬиЕуЁЃгЩгкФкЧЖІЬC/OS-IIЃЌЪЙГЬађЕФПЊЗЂжмЦкДѓДѓЫѕЖЬЃЌдіЧПСЫЯЕЭГЕФПЩЮЌЛЄадКЭРЉеЙадЃЌдкЪЕМЪЕФгІгУжаШЁЕУСЫСМКУЕФаЇЙћЁЃ |
ЭјгбЦРТл