
机器人是怎样上春晚的
发布时间:2016-2-23 09:33
发布者:designapp
|
摘要:春晚总是伴随着大家的各种吐糟而收场,但在今年的春晚舞台上出现很多带有新时代特征的东西,比如航拍的无人机,跳“广场舞的机器人大妈”…… 机器人怎样上春晚其实是个伪命题,因为机器人终归属于聪明的人类操作着…… 说到机器人就先说说美国耶鲁大学,他们曾经设计了一台这样的计算机:它自行编制答话,会论证,会“思考”,某种程度上有点像人。靠着心理学和信息论,科学家为自己提出了一个令世人惊异不已的课题:把人的思维方式和行为研究清楚,然后去人工模拟它。 刚上春晚的广场舞机器人就是基于这类的机器人,那么这样的智能机器人“大妈”又是怎么组成的呢? 机器人的组成 一个机器人由机械部分、传感部分和控制部分组成。 机械部分 机器人的机械结构系统由机身、手臂、末端操作器三大件组成。每一大件都有若干自由度,构成一个多自由度的机械系统。机器人按机械结构划分可分为直角坐标型机器人、圆柱坐标型机器人、极坐标型机器人、关节型机器人、SCARA型机器人以及移动型机器人。 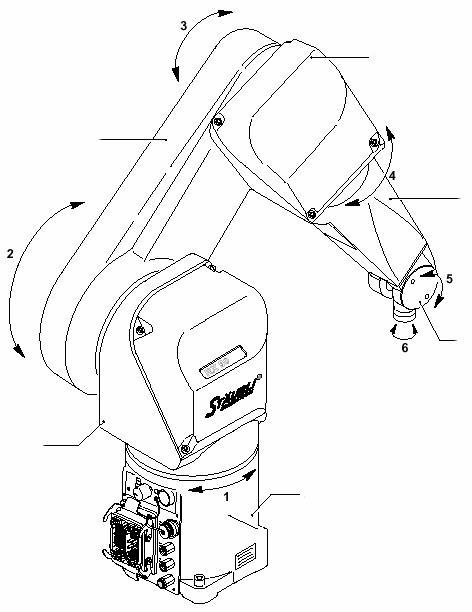 传感部分 它由内部传感器模块和外部传感器模块组成,获取内部和外部环境中有用的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化水平。人类的感受系统对感知外部世界信息是极其巧妙的,然而对于一些特殊的信息,传感器比人类的感受系统更有效。 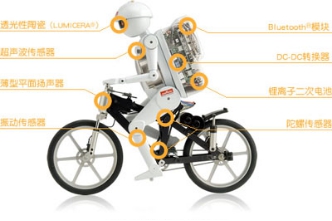 控制与驱动部分 控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。 根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。 驱动系统是向机械结构系统提供动力的装置。采用的动力源不同,驱动系统的传动方式也不同。驱动系统的传动方式主要有四种:液压式、气压式、电气式和机械式。电力驱动是目前使用最多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式,驱动电机一般采用步进电机或伺服电机。  其实这种机器人之所以能够实现这么流畅的动作,不仅仅是微型计算机的控制技术,也是与伺服电动机的飞速发展息息相关的。 机器人的伺服电机系统,设备在感知外界信息后会快速传递给控制器,然后控制器会发出控制信号驱动伺服电机系统快速进行姿势调整。伺服电机系统在这里就是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体来获得机器人的各种运动。 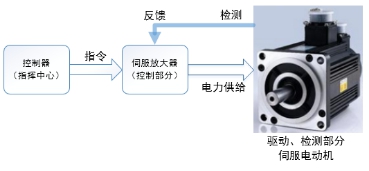 电机行业经过了历史的沉淀,可以说电机已经完全融入到人们生活的血液里。而伴随着电机质量要求的提升,电机测试行业也逐步兴起。生活每多一分美好,都会要求电机的工作多一分精准。尤其是现在的伺服电机,要想保证它能在实际动态工况时有精准的控制,前期的测试必须要有动态的测试环节来模拟一个动态的工况,致远电子的MPT1000电机测试系统首创了自由加载引擎技术,可实现对系统负载输出的自由动态控制和瞬态波形记录,完全满足对电机控制系统瞬态波形和响应时间的测量,是电机测试最可靠的选择。 |





网友评论