
ИјБПөзіШЖыіөХыіөҝШЦЖЖчУІјюФЪ»·КөКұ·ВХжІвКФЖҪМЁЙијЖ
·ўІјКұјдЈә2010-7-22 10:26
·ўІјХЯЈәvinda
|
ЛжЧЕЖыіө№ӨТөөД·ўХ№әНҪшІҪЈ¬ИЛГЗ¶ФЖыіөөД¶ҜБҰРФЎўҫӯјГРФЎў°ІИ«РФј°ЕЕ·ЕөИ·ҪГжМбіцБЛёьёЯөДТӘЗуЈ¬ҙ«НіөД»ъРөКҪҝШЦЖПөНіТСҫӯФ¶Ф¶І»ДЬВъЧгХвР©РиТӘЎЈөзЧУ»ҜҝШЦЖПөНіТФЖдёЯҫ«¶ИЎўёЯЛЩ¶ИЎўҝШЦЖБй»оЎўОИ¶ЁҝЙҝҝөИМШөгЦрҪҘИЎҙъБЛ»ъРөКҪҝШЦЖПөНіЈ¬КЗЖыіөҝШЦЖПөНіөД·ўХ№ЗчКЖЎЈ УЙУЪ¶ФҝШЦЖРФДЬөДТӘЗуФҪАҙФҪСПёсЈ¬К№өГЖыіөөзЧУҝШЦЖПөНі¶ФҝШЦЖЖчөДТӘЗуФҪАҙФҪёЯЎЈҝШЦЖЖчөДҝӘ·ўУлЙијЖТ»°г¶јТӘҫӯ№эИзНј1ЛщКҫөДІҪЦиЈ¬јҙУЙЙПІгөҪөЧІгЈ¬ФЩУЙөЧІгөҪЙПІгөДТ»ёцVЧЦРО№эіМЎЈКЧПИКЗҝШЦЖЖчөДЙПІг№ҰДЬЙијЖЈ¬ПкПёИ·¶ЁҝШЦЖЖчҪ«ТӘКөПЦөД№ҰДЬЈ»И»әуЙъіЙДҝұкіМРтҙъВлЈ»ЧоәуКЗҝШЦЖЖчөДөЧІгИнЎўУІјюКөПЦЎЈ 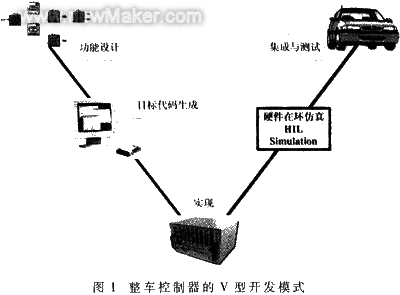 ҙУҝШЦЖЖчКөПЦөҪКөіөІвКФөД№эіМЦР»№РиТӘҪшРРУІјюФЪ»·КөКұ·ВХжІвКФЎЈХвКЗТтОӘФЪХыіөҝШЦЖЖчөДҝӘ·ў№эіМЦРЈ¬АыУГХыіөҝШЦЖЖчУІјюФЪ·ВХжІвКФЖҪМЁ№№ҪЁРйДвөДХыіөПЦіЎ»·ҫіЎЈ¶ФҝШЦЖЖчҪшРРУІјюФЪ»··ВХжІвКФЈ¬І»ө«ҝЙТФҙуҙујУҝмХыіөҝШЦЖЖчИнЎўУІјюөДҝӘ·ў№эіМЈ¬¶шЗТҝӘ·ўіЙ№ҰөДҝШЦЖЖчҫЯУРҪПёЯөДҝЙҝҝРФЎЈТтОӘ·ВХжІвКФЖҪМЁҝЙТФДЈДвіцФЪКөіөКФСйЦРДСТФКөПЦөДМШКвРРК»ЧҙМ¬әНОЈПХЧҙМ¬Ј¬ҙУ¶ш¶ФХыіөҝШЦЖЖчҪшРРИ«ГжөДІвКФЎЈҝШЦЖЖчУІјюФЪ»··ВХжІвКФЦРЈ¬ПөНіУГКэС§ДЈРНАҙҙъМжЈ¬ҝШЦЖЖчК№УГКөОпЈ¬ПөНіДЈРНәНҝШЦЖЖчЦ®јдөДҪУҝЪТӘУлКөјКұЈіЦТ»ЦВЈ¬ФЪ·ВХжөчКФНкұПәуЈ¬ҙпөҪҝШЦЖЖчәНПөНіЦ®јдөДЎ°ҙ№Цұ°ІЧ°Ўұ»тЎ°ҙ№ЦұјҜіЙЎұЎЈҝШЦЖЖчФЪНкіЙУІјюФЪ»··ВХжЦ®әуЈ¬ҫНҝЙТФҪшИлПөНіјҜіЙәНІвКФ»·ҪЪЈ¬ЧоәуКөПЦіхЖЪЙијЖөДёчПо№ҰДЬәНЦёұкЎЈ ұҫОД»щУЪMatlabЈҜSimulink RTWәНXPC Real-time TargetКөКұ·ВХжЖҪМЁЈ¬ЕдәПPCIКэҫЭІЙјҜҝЁөЧІгИнјюөДҝӘ·ўәНРЕәЕөчАнЧ°ЦГУІјюЙијЖЈ¬ПөНіөШКөПЦБЛИјБПөзіШЖыіөХыіөҝШЦЖЖч·ВХжІвКФЖҪМЁЎЈАыУГёГЖҪМЁҝЙТФ¶ФХыіөҝШЦЖЖчУІјюөзЖшМШРФЎўөЧІгИнјюЖҪМЁәНҝШЦЖЛг·ЁөИҪшРРІвКФЎЈ УІјюФЪ»·КөКұ·ВХжІвКФЖҪМЁ·Ҫ°ёЙијЖ УІјюФЪ»·КөКұ·ВХжЖҪМЁ№№ҪЁБЛРйДвөДХыіө»·ҫіЈ¬Іў»щУЪРйДвөДИЛ»ъҪ»»ҘЛҫ»ъДЈРНЈ¬Ҫ«ИЛЧчОӘУІјюФЪ»·өДТ»ёцФӘЛШТэИлөҪКөјКөД·ВХжІвКФЦРЈ¬ҫЯМеҪб№№ИзНј2ЛщКҫЎЈБҪёц»щУЪ№ӨТөҝШЦЖјЖЛг»ъөДРйДвЖҪМЁ·ЦұрОӘРйДвХыіөЖҪМЁәНРйДвЛҫ»ъЖҪМЁЎЈРйДвХыіөЖҪМЁ»щУЪMatlabЈҜSimulinkxPC TargetКөКұ·ВХж»·ҫіЈ¬ЧчУГКЗДЈДвХжКөИјБПөзіШҝНіөөДФЛРРЈ¬ОӘІвКФХыіөҝШЦЖЖчМṩЛщРиөДРйДвҝШЦЖ¶ФПуЎЈРйДвЛҫ»ъЖҪМЁ»щУЪMatlabЈҜSimulink RTW TargetКөКұ·ВХж»·ҫіЈ¬ЧчУГКЗДЈДвХжКөИјБПөзіШҝНіөөДІЩҝШ»ъ№№Ј¬ЕдәПјУЛЩМӨ°еОӘІвКФХыіөҝШЦЖЖчМṩЛщРиөДРйДвјЭК»»·ҫіЎЈөұБҪёцјЖЛг»ъРйДвЖҪМЁ¶ФКөјК»·ҫіҪшРРДЈДвКұЈ¬НЁ№эКэҫЭІЙјҜҝЁЎўCANНЁС¶ҝЁУлҝЙЕдЦГөДРЕәЕҙҰАнЧ°ЦГПаБ¬Ј¬ҝЙЕдЦГөДРЕәЕҙҰАнЧ°ЦГ¶ФРЕәЕҪшРРҙҰАнЈ¬ҙУ¶шКөПЦХжКөөДёҙФУХыіө»·ҫіЈ¬ЦұҪУУлХыіөҝШЦЖЖчБ¬ҪУҪшРР·ВХжІвКФКФСйЎЈІўЕдУР»щУЪCANЧЬПЯөДКөКұјаҝШЧ°ЦГЈ¬ҝЙТФИ«№эіМКөКұөШјаҝШ·ВХжІвКФКФСйЎЈ  УІјюФЪ»·КөКұ·ВХжІвКФЖҪМЁУІјюЙијЖ РйДвЖҪМЁУІјюЙијЖ РйДвЖҪМЁөДУІјюРиТӘНкіЙјЖЛг»ъДЈРНІъЙъөДРйДвРЕәЕөҪХжКөРЕәЕөДЧӘ»»Ј¬ХвР©РЕәЕ°ьАЁКэЧЦБҝКдИлКдіцРЕәЕЎўДЈДвБҝКдИлКдіцРЕәЕәНCANНЁС¶РЕәЕЎЈАэИзИјБПөзіШ·ў¶Ҝ»ъЖф¶ҜҝӘ№ШРЕәЕКфУЪКэЧЦРЕәЕЈ¬өз»ъЧӘЛЩРЕәЕКфУЪДЈДвРЕәЕЈ¬¶шҝШЦЖЖчҝШЦЖГьБоНЁ№эCANЧЬПЯНшВзҪшРРҙ«ЛНЎЈ РйДвЖҪМЁөДКэЧЦРЕәЕәНДЈДвРЕәЕНЁ№эPCIҪУҝЪөДКэҫЭІЙјҜҝЁКөПЦУлХжКөКАҪзөДҪ»»»ЎЈІЙУГөДёчЦЦНЁС¶ҝЁТ»°г¶јҫЯУРMatlabөЧІгИнјюЗэ¶ҜіМРтЈ¬ҝЙТФЦұҪУУГУЪКөКұ·ВХжЎЈ¶ФУЪІҝ·ЦІ»Ц§іЦMatlabКөКұ·ВХж»·ҫіөДКэҫЭІЙјҜҝЁЈ¬ҝЙТФІЙУГMatlabЈҜSimulink»·ҫіПВөДSәҜКэұаРҙЈ¬ІўФЪMatlab»·ҫіПВөчУГ¶ҜМ¬БҙҪУҝвЎЈұҫОДІЙУГөДPCI1731ЎўPCI1723әНPCI1720°еҝЁІўІ»ЕдМЧMatlabЗэ¶ҜіМРтЈ¬ТтҙЛІЙУГSәҜКэҪшРРјҜіЙЎЈХыёцРйДвЖҪМЁ№ІҫЯұё32В·КэЧЦБҝКдИлҪУҝЪЎў32В·КэЧЦБҝКдіцҪУҝЪЎў32В·КэЧЦБҝКдИлЈҜКдіцёҙУГҪУҝЪЎў32В·ДЈДвБҝКдИлҪУҝЪәН20В·ДЈДвБҝКдіцҪУҝЪЎЈ РйДвЖҪМЁІъЙъ»тҪУКХөДCANРЕәЕНЁ№эPCIЧЬПЯУлCANНЁС¶ҝЁПаБ¬Ј¬УЙCANНЁС¶ҝЁНЁ№эCANЧЬПЯУлҙэІвХыіөҝШЦЖЖчҪшРРНЁС¶ЎЈРйДвЖҪМЁЦ§іЦCAN2.0AәНCAN2.0BА©Х№РӯТйЈ¬ДЬ№»Н¬КұКдіц2В·¶АБўөДCANРЕәЕЎЈ РЕәЕөчАнЖчУІјюЙијЖ УЙУЪИјБПөзіШҝНіөЙПөДРЕәЕұИҪПёҙФУЈ¬КэЧЦРЕәЕУР24VЎў12VәН5VөИІ»Н¬өДЗэ¶ҜөзЖҪәНЗэ¶Ҝ·ҪКҪЈ¬ДЈДвРЕәЕТІУРёчЦЦөзС№·¶О§әНЗэ¶Ҝ№ҰВКөДІ»Н¬РиЗуЎЈ¶шҙУРйДвЖҪМЁҫӯ№эКэҫЭІЙјҜҝЁКдіцөДРЕәЕұИҪПөҘТ»Ј¬№Кҫӯ№эРЕәЕөчАнЖч¶ФРЕәЕҪшРРөчАнәуЈ¬ІЕДЬ№»НкИ«ФЩПЦИјБПөзіШҝНіөЙПөДХжКөҝШЦЖҪУҝЪЈ¬ЦұҪУУлХыіөҝШЦЖЖчБ¬ҪУҪшРР·ВХжІвКФЎЈ ИзНј2ЛщКҫЈ¬РйДвЖҪМЁІъЙъ»тҪУКХөДКэЧЦДЈДвРЕәЕНЁ№эPCIЧЬПЯУлКэҫЭІЙјҜҝЁПаБ¬ЎЈКэҫЭІЙјҜҝЁУлҝЙЕдЦГөДРЕәЕөчАнЖчЦ®јдНЁ№эЧЁУГөДКэҫЭПЯҪшРРКэҫЭҪ»»»Ј¬ҫӯ№эҝЙЕдЦГөДРЕәЕөчАнЖч¶ФРЕәЕҪшРРұШТӘөД·ЕҙуЎўөзЖҪЧӘ»»ЎўВЯјӯЧӘ»»әуЈ¬КдіцРЕәЕНкИ«·ыәПКөјКХыіөРЕәЕ№ж·¶Ј¬ІўІЙУГұкЧјҪУҝЪУлҙэІвХыіөҝШЦЖЖчПаБ¬Ј¬ҙУ¶шКөПЦ¶ФХыіөҝШЦЖЖчөДОЮ·мБ¬ҪУЎЈНЁ№эөчХыҝЙЕдЦГРЕәЕөчАнЖчөДЕдЦГ·ҪКҪЈ¬ҝЙТФКөПЦёчЦЦіөБҫөДІ»Н¬РЕәЕ№ж·¶ЎЈРЕәЕөчАнЖчОӘБй»оөДДё°еЧУ°еЙијЖЈ¬Дё°еНкіЙНЁУГөДРЕәЕБ¬ҪУөзФҙ№©ёшөИИООсЈ¬ЧУ°еНкіЙҫЯМеөДҝЙЕдЦГРЕәЕҙҰАн№ҰДЬЎЈДё°еәНЧУ°еБӘәП№ӨЧчЈ¬ҝЙТФёщҫЭУГ»§өДРиТӘЛжКұёь»»ЧУ°еөзВ·Ј¬ТФВъЧгІ»Н¬·ВХжІвКФөДРиТӘЎЈ УІјюФЪ»·КөКұ·ВХжІвКФЖҪМЁИнјюЙијЖ РйДвХыіөЖҪМЁИнјюЙијЖ РйДвХыіөЖҪМЁ»щУЪMatlabЈҜSimulinkЖҪМЁ№№ҪЁБЛИјБПөзіШЖыіө·ВХжДЈРНЈ¬ёГДЈРН°ьАЁИјБПөзіШ·ў¶Ҝ»ъЎўDC-DCұд»»ЖчЎўРоөзіШЎўТмІҪЗэ¶Ҝөз»ъј°іөБҫёәФШЎЈПөНіёчІҝјюДЈРНТ»·ҪГжРиҝјВЗДЈРНҫ«¶ИЈ¬БнТ»·ҪГжұШРлВъЧгКөКұРФөДТӘЗуЎЈХыёцДЈРНФЪMatlabЈҜSimulink xPC TargetКөКұ·ВХж»·ҫіЙПФЛРРЎЈХыіө·ВХжДЈРННЁ№эPCIКэҫЭІЙјҜҝЁәНPCI CANҝЁКөПЦУлјЭК»ФұәНХыіөҝШЦЖЖчөДНЁС¶ЎЈ РйДвЛҫ»ъЖҪМЁИнјюЙијЖ РйДвЛҫ»ъЖҪМЁКөПЦБЛҝЙ№©јЭК»ФұІЩЧчөДРйДвјЭК»»·ҫіЎЈіэБЛјЭК»јУЛЩРЕәЕУЙІвКФИЛФұНЁ№эМӨ°еКдИлНвЈ¬ЖдУаХыіөјзНЈҝӘ№ШЎўИјБПөзіШҝӘ№ШЎўөз»ъЧӘЛЩұнЎўіөЛЩұнЎўЛ®ОВұЁҫҜөИҝШЦЖҝӘ№ШәНТЗұнҫщУЙРйДвЛҫ»ъЖҪМЁКөПЦЎЈХыёцДЈРН»щУЪMatlabЈҜSimulink RTW TargetКөКұ·ВХж»·ҫіКөПЦЈ¬ІўАыУГMatlab Gauges№ӨҫЯПдКөПЦБЛХыіөТЗұнПФКҫәНҝШЦЖҝӘ№ШКдИлЎЈGaugesКЗMatlabФЪSimulinkЦРМṩөДТ»ҝоУГУЪПФКҫјаҝШКэҫЭөДТЗұнҝӘ·ў№ӨҫЯЈ¬АыУГGauges№ӨҫЯПдҝЙТФФЪSimulinkДЈРНЦРҝмЛЩөШҝӘ·ўіцРйДвіөУГТЗұнПөНіЎЈРйДвЛҫ»ъ·ВХжДЈРНН¬СщНЁ№эPCIКэҫЭІЙјҜҝЁәНPCI CANҝЁКөПЦУлјЭК»ФұәНХыіөҝШЦЖЖчөДНЁС¶ЎЈ КөКұРФДЬ·ЦОц MatlabЈҜSimulinkОӘКөКұ·ВХжМṩБЛәЬәГөДИнјю»·ҫіЎЈReal-TimeWorkshopҙъВлЧФ¶ҜЙъіЙ№ӨҫЯҝЙТФҪ«·ВХжДЈРНұаТлЙъіЙКөКұCҙъВлЈ¬ІўЦ§іЦ¶аЦЦКөКұ·ВХжДҝұк»·ҫіЈ¬°ьАЁMatlab №ӨҫЯПдRTW TargetЎўxPC Tar-getТФј°өЪИэ·ҪИнјюЈ¬ИзdSPACEөИЎЈұҫОДСЎФсБЛxPC TargetәНRTW TargetАҙ№№ҪЁРйДвХыіөЖҪМЁәНРйДвЛҫ»ъЖҪМЁЎЈ ХыіөРйДвЖҪМЁіРөЈФЩПЦХжКөИјБПөзіШЖыіөФЛРРөДИООсЈ¬КЗХыёцІвКФЖҪМЁөДәЛРДІҝјюЎЈУЙУЪИјБПөзіШЖыіөҪб№№ёҙФУЎўҝШЦЖ¶ФПуҪП¶аЈ¬ОӘБЛХжКөФЩПЦХыіөФЛРРЗйҝцЈ¬ПөНіёчІҝјюДЈРНіэБЛРиТӘВъЧгҫ«¶ИТӘЗуНвЈ¬»№ұШРлСПёсВъЧгКөКұРФөДТӘЗуЎЈХыіөРйДвЖҪМЁІЙУГөДxPC TargetКөКұ·ВХж»·ҫіІЙУГДҝұк»ъәНЛЮЦч»ъөДҪб№№Ј¬УЙMatlabЙъіЙөДКөКұДЪәЛНЁ№эИнЗэ»тХЯUSBЙБҙж¶АБўФЛРРФЪДҝұк»ъЙПЈ¬ЦұҪУөчУГCPUЧКФҙЎЈ·ВХжДЈРННЁ№эЛЮЦч»ъұаТлЙъіЙКөКұҙъВләуПВФШөҪДҝұк»ъЙПФЛРРЈ¬ДЬ№»КөПЦСПёсөДПөНіКөКұ·ВХжЎЈ РйДвЛҫ»ъЖҪМЁІЙУГөДRTW TargetКөКұДЪәЛЦұҪУФЛРРФЪMatlabЈҜSimulink»·ҫіЦРЈ¬ФЪН¬Т»МЁPC»ъЙПҫНДЬ№»СёЛЩКөПЦПөНіөДКөКұ·ВХжЎЈЖдИұөгКЗУЙУЪХыёцПөНіФЪWindowsПөНіПВФЛРРЈ¬КөКұДЪәЛІ»ДЬНкИ«ХјУРPC»ъІЩЧчПөНіЧКФҙЈ¬КөКұРФКЬЖдЛыФЛРРіМРтөДУ°ПмЎЈУЙУЪјЭК»ФұДЈДвІЩЧч¶ФКөКұРФТӘЗуІ»ёЯЈ¬ТтҙЛСЎФсRTW TargetКөКұ·ВХж»·ҫіДЬ№»ВъЧгХвТ»ТӘЗуЎЈ КөКұ·ВХжРЕәЕ¶ЁТе РйДвХыіөЖҪМЁЎўРйДвЛҫ»ъЖҪМЁөДРЕәЕ¶ЁТеИзұн1Ўўұн2ЛщКҫЈ¬УлДҝұкИјБПөзіШЖыіөНкИ«ұЈіЦТ»ЦВЎЈРйДвХыіөЖҪМЁ¶ЁТеБЛИјБПөзіШЖыіөёчІҝјюҝШЦЖЖчCANНшВзҪЪөгРӯТйТФј°ХыіөҝШЦЖЖчЦЖ¶ҜРЕәЕКдИләНХыіөіөЛЩКдіцЎЈРйДвЛҫ»ъЖҪМЁПөНіРЕәЕ°ьАЁёчЦЦјЭК»ФұЦёБоКдіцТФј°јЭК»ФұГж°еПФКҫРЕПўКдИлЈ¬Іў¶ЁТеБЛТ»ёцКэҫЭІЙјҜCANҪЪөгЎЈРйДвХыіөЖҪМЁУлРйДвЛҫ»ъЖҪМЁіэБЛіөЛЩРЕәЕЎўCANНшВзРЕәЕөДБӘПөЈ¬ЖдЛыЛщУРРЕәЕҫщКЗУлХыіөҝШЦЖЖчҪ»»ҘЎЈ  КөСй·ЦОц АыУГ·ВХжІвКФЖҪМЁҝЙТФ¶ФИјБПөзіШХыіөҝШЦЖЖчҪшРРИнУІјюКөКұФЪ»·ІвКФЎЈҪ«ХыіөҝШЦЖЖчНЁ№эРЕәЕөчАнЧ°ЦГУл·ВХжІвКФЖҪМЁ°ҙХХКөКұ·ВХжРЕәЕ¶ЁТеҪ«ПаУҰҪУҝЪРЕәЕБ¬ҪУЖрАҙЈ¬ФЩ·ЦұрФЛРРРйДвХыіөЖҪМЁәНРйДвЛҫ»ъЖҪМЁЈ¬јҙҝЙУГУЪІвКФЎЈ ёГИјБПөзіШЖыіөУІјюФЪ»·КөКұ·ВХжЖҪМЁТСҫӯіЙ№ҰөШУҰУГУЪЎ°К®ОеЎұИјБПөзіШіЗКРҝНіөөзҝШөҘФӘөДҝӘ·ўЎЈФЪҝШЦЖЖчЙПіөЗ°јҙҝЙ¶ФХыіөҝШЦЖЖчКэЧЦЎўДЈДвРЕәЕөДөзЖшМШРФЎўҝШЦЖВЯјӯәНЛг·ЁЎў№КХПХп¶П№ҰДЬөИҪшРРјмСйЎЈЕдәПҝмЛЩФӯРНҝӘ·ў№ӨҫЯdSPACEҝЙТФНкХыөШКөПЦҝмЛЩФӯРНҝӘ·ўХыіөҝШЦЖЖчІвКФБчіМЈ¬ИзНј3ЛщКҫЎЈ 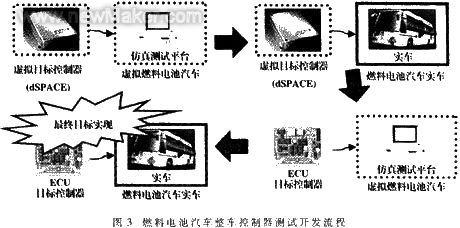 »щУЪұҫ·ВХжІвКФЖҪМЁөДКФСйіэБЛҙэІвХыіөҝШЦЖЖчОӘКөјКіөУГҝШЦЖЖчТФНвЈ¬ЛщУРөДІвКФ»·ҫіҫщОӘ·ВХжІвКФЖҪМЁРйДвХжКө»·ҫіөГөҪЈ¬ІўЗТҙУҝШЦЖЖчҪЗ¶ИЙПҝҙУлХыіөХжКө»·ҫіНкИ«Т»ЦВЈ¬ҙУ¶шКөПЦБЛөНіЙұҫөШЎўұгҪЭөШЎўҝмЛЩөШ¶ФХыіөҝШЦЖЖчҪшРРёчЦЦІвКФЈ¬І»ө«МбёЯБЛХыіөҝШЦЖЖчөДҝӘ·ўР§ВКЈ¬ТІНкЙЖБЛХыіөҝШЦЖЖчЙПіөЗ°өДұШТӘІвКФ№эіМЈ¬ҪөөНБЛХыіөҝШЦЖЖчҪшРРКөіөКФСйөД·зПХј°іЙұҫЎЈёГЖҪМЁҫЯУРНЁУГРФЈ¬ҝЙТФёщҫЭРиТӘҪшРРІ»Н¬өД·ВХжІвКФЈ¬ІўІ»ҫЦПЮУЪХыіөҝШЦЖЖчөДҝӘ·ўЈ¬ҫЯУР№г·әөДУҰУГЗ°ҫ°ЎЈ ХыіөҝШЦЖЖчҫӯ№э·ВХжЖҪМЁөД·ҙёҙІвКФәуҪ«ҪшРРКөјКөДКөіөКФСйЈ¬¶шҙУКФСйЦР»сөГёчІҝјюКэҫЭУЦОӘ·ВХжДЈРНөДҪшТ»ІҪҫ«И·»ҜЖҘЕдұк¶ЁМṩБЛМхјюЈ¬ҙУ¶шК№·ВХжЖҪМЁёь·ыәПКөјКЎЈ |
НшУСЖАВЫ