
ЖыіөөзЧУТәС№ЦЖ¶ҜПөНіёъЛжМШРФөДКөСйСРҫҝ ----Жыіө EHB ПөНіөДУІјюЙијЖ(ЛД)
·ўІјКұјдЈә2015-11-20 10:57
·ўІјХЯЈәdesignapp
|
ЎЎЎЎ3.3 EHBҝШЦЖПөНіөДЙијЖ ЎЎЎЎEHBҝШЦЖПөНіЦРУІјюІҝ·ЦЦчТӘ°ьАЁТФПВДЪИЭЈәҝШЦЖөҘФӘECUЙијЖЎўКдИлНЁөАЙијЖЎўКдіцНЁөАЙијЖЎўөзФҙПөНіЙијЖәНКэІЙПөНіЙијЖЎЈ ЎЎЎЎ3.3.1ҝШЦЖПөНіХыМеҪб№№ЙијЖ ЎЎЎЎёщҫЭҝШЦЖПөНіECUөҘФӘөДҪб№№Ј¬И·¶ЁЖдУІјюЧйіЙИзНј3.10ЛщКҫЈ¬°ьАЁЈәөҘЖ¬»ъЎўөзФҙДЈҝйЎўҙ«ёРЖчРЕәЕҙҰАнДЈҝйЎўҝШЦЖКдіцөчАнДЈҝйј°Зэ¶ҜҝШЦЖДЈҝйөИІҝ·ЦЎЈХвР©ДЈҝй№№іЙБЛECUөДНкХыҝШЦЖПөНіЎЈЖдЦРЗэ¶ҜДЈҝй°ьАЁ¶ФEHBПөНіЦРөзҙЕ·§өДЗэ¶ҜДЈҝйЈ¬ТФј°¶ФёЯС№РоДЬЖч»·ҪЪЦРөз»ъұГөДЗэ¶ҜДЈҝйЈ¬ХвБҪҝйЦұҪУЧчУГУЪіөБҫЦЖ¶ҜПөНіЦРөДЦЖ¶ҜВЦёЧЎЈПВГжөДХВҪЪЦРОТГЗҪ«¶ФГҝІҝ·ЦҪшРРСРҫҝЎЈ ЎЎЎЎ3.3.2ПөНіҙҰАнРҫЖ¬өДСЎУГ ЎЎЎЎЖыіөEHBПөНіКЗТ»ЦЦјЖЛг»ъҝШЦЖПөНіЈ¬ЖдәЛРДІҝ·ЦКЗөзЧУҝШЦЖөҘФӘECU.ЛьТ»·ҪГжҪ«ІЙјҜөҪөДҙ«ёРЖчРЕәЕA/DЧӘ»»іЙКэЧЦРЕәЕКдИлөҪјЖЛг»ъЦРИҘҪшРР·ЦОцҙҰАнЈ¬БнТ»·ҪГжТӘҪ«ҝШЦЖРЕәЕНЁ№эD/AЧӘ»»іЙКэЧЦРЕәЕКдіцөҪНвІҝөДЗэ¶ҜПөНіЦРЈ¬¶шөзЧУҝШЦЖөҘФӘДЪІҝCPUНЁ№эИнјюұаіМАҙКөПЦёчЦЦҝШЦЖЛг·ЁЈ¬ЛщТФөзЧУҝШЦЖөҘФӘКЗҝШЦЖПөНіөДЦШТӘІҝ·ЦЎЈ ЎЎЎЎДҝЗ°ЦЖ¶ҜПөНіІЙУГөДөҘЖ¬»ъКЗДҰНРВЮАӯЎўУўМШ¶ыЎўОчГЕЧУЎўУў·ЙБиЎў·ЙЛјҝЁ¶ыөИ№«ЛҫөДөД16О»өҘЖ¬»ъЎЈEHBПөНіТӘЗуҪПёЯКэҫЭҙҰАнЛЩ¶ИЈ¬ҙҰАнЖчРиТӘНкіЙёчЦЦјЖЛгЈ¬АэИзјУјхЛЩ¶ИЎўІОҝј»¬ТЖВКөИЎЈ ЎЎЎЎёщҫЭEHBөДМШРФТӘЗуЈ¬ЛщСЎУГөДЦРСлҙҰАнЖчКЗ·ЙЛјҝЁ¶ы№«ЛҫНЖіцөД16О»өҘЖ¬»ъMC9S12,№ҰДЬЗҝҙуөДЖ¬ЙПНвЙиЧУПөНіәНЖ¬ЙПҙжҙўЖчөҘФӘНкГАҪбәПЈ¬ҫЯУРёьёЯөДјҜіЙ¶ИЎўёь·бё»өДЖ¬ЙПЧКФҙәНёьЗҝөДҙҰАнДЬБҰЈ¬УРЦъУЪМбёЯПөНіРФДЬЎўјхРЎМе»эәНҪөөНіЙұҫЎЈН¬КұЈ¬ЛьҪшТ»ІҪФцЗҝБЛБй»оөД№ҰВК№ЬАнЎЈёГ№ҰВК№ЬАн»ъЦЖУРР§ҝШЦЖБЛОўҝШЦЖЖчФЪМШ¶ЁЧҙМ¬ПВөД№ҰәДЈ¬УРР§ҪөөНБЛПөНіЧЬ№ҰәДЈ¬ҝЙіӨЖЪК№УГЈ¬ҝЙҝҝРФёЯЎЈ ЎЎЎЎ 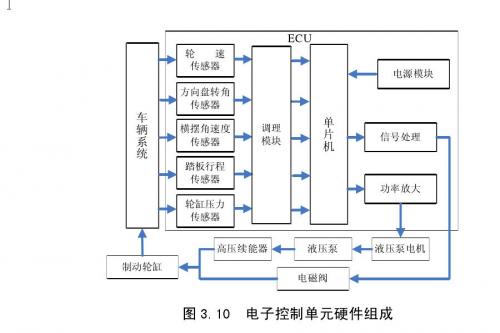 ЎЎЎЎMC9S12ПөБРОўҝШЦЖЖчөДМШөгЈә ЎЎЎЎ(1)әЛРДCPUЈә16О»өДCPUЈ¬Ль№ЬАнЧЕMC9S12DG128әННвІҝЛщУРЙиұёөД»о¶ҜЈ¬НЁ№эРҫЖ¬өДДЪІҝЧЬПЯУлMCUёчёц№ҰДЬДЈҝйНЁРЕЈ¬НЁКұНЁ№эНвІҝЧЬПЯУлПөНіНвЙиҪшРРНЁС¶ЎЈCPUЦРУР6ёцјДҙжЖчЈ¬13ЦЦС°Ц··ҪКҪәН400¶аМхЦёБоЈ¬ДЪІҝ16ОӘКэҫЭНЁөАЦ§іЦёЯР§ЎўҝмЛЩөДЛгКхІЩЧчЎЈ ЎЎЎЎ(2)ҙжҙўЖчЈәДЪІҝУР128KBөДFlash EEPROMЈ¬2KBөДEEPROMЈ¬8KBөДRAM. ЎЎЎЎ(3)КұЦУәНёҙО»·ўЙъЖч(CRG)Јә°ьАЁЛшПа»·КұЦУЖөВК·ЕҙуЖчЎўҝҙГЕ№·ЎўКөКұЦР¶П(RTI)әНКұЦУјаКУЖч(CM)ЎЈ ЎЎЎЎ(4)ҙшЦР¶П№ҰДЬөД8О»әН4О»¶ЛҝЪЈәҝЙұаіМөДЙПЙэСШ»тПВҪөСШҙҘ·ўЎЈ ЎЎЎЎ(5)A/DЧӘ»»ҪУҝЪЈә2ёц8НЁөАөД10О»A/DЧӘ»»ЖчЈ¬Б¬РшЧӘ»»ДЈКҪЈ¬ҝЙұаіМІЙСщКұјдЈ¬¶аНЁөАЙЁГж·ҪКҪЈ¬УөУРНвІҝЧӘұдҙҘ·ўҝШЦЖЈ¬ЧӘ»»НкіЙЦР¶ПөИ№ҰДЬЎЈ ЎЎЎЎ(6)CANЧЬПЯДЈҝйЈәјҜіЙБЛ3ёцCANҝШЦЖЖчЎӘMSCAN12ДЈҝйЈ¬јжИЭCAN2.0A/BЈ¬КэҫЭҙ«КдЛЩВКҙп1Mb/sЈ¬ҫЯУР5ёцҪУКХ»әіеЖчЈ¬3ёц·ўЛН»әіеЖчЈ¬4ёц¶АБўөДЦР¶ПНЁөАЈ¬ҫЯУРөННЁВЛІЁЖч»ҪРС№ҰДЬЎЈ ЎЎЎЎ(7)ФцЗҝРНІ¶ЧҪ¶ЁКұЖч(ECT)ЈәёГ¶ЁКұЖчөДҝЙұаіМјЖКэЖчОӘ16О»Ј¬УР8ёцҝЙұаіМКдИлІ¶ЧҪ»тКдіцұИҪПНЁөАЈ¬4ёц8О»»т2ёц16О»өДВціеАЫјУЖчЎЈЛДёц¶ЁұкЖчөД16О»өЭјхДЈКэјЖКэЖчЎЈ ЎЎЎЎ(8)ВцҝнөчЦЖДЈҝй(PWM)ЈәУР8ёцКдіцНЁөАЈ¬НЁ№эНвІҝұаіМИ·¶ЁГҝёцНЁөАөДЦЬЖЪәНХјҝХұИЈ¬ёчНЁөАёчУРТ»ёцјЖКэЖчЈ¬ҝЙ¶АБўҝШЦЖЈ¬8ёц8НЁөАТІҝЙЧц16ёц4НЁөАК№УГЈ¬КұЦУЖөВКҝЙөч·¶О§ҝнЈ¬УР4ёцКұЦУФҙҝЙСЎФсЈ¬ЦЬЖЪәНВцҝнҝЙТФұ»Л«»әіеЎЈёчёцНЁөАҝЙ·ЦұрЙиЦГЦРРД¶ФіЖ»тЧу¶ФЖлКдіцЈ¬ҝЙЧчОӘЦР¶ПКдИлЈ¬УРҪфјұКВјюҝЙТФ№Ш¶ПКдИлЎЈ ЎЎЎЎ(9)ҙ®РРҝЪЎўЧЬПЯЈәРҫЖ¬ДЪІҝМṩ2ёцН¬ІҪҙ®РРЙиұёҪУҝЪ(SPI)Ј¬ІўҫЯУРТФПВМШөгЈәИ«Л«№ӨЎўИэПЯН¬ІҪҙ«ЛН;өҘёцКэҫЭТэҪЕөДЛ«Птҙ«ЛН·ҪКҪ;Цч»ъО»ҙ«ЛНЖөВКЧоҙу4MHzЈ¬өұMCUЧЬПЯЖөВКөИУЪ8MHzКұЧоРЎОӘ31.25kHz;ҝЙіМҝШЙиЦГО»КұЦУј«РФЎўПаО»әНКэҫЭО»ҙ«ЛНЛіРтЈ¬јҙҝЙСЎёЯО»ФЪЗ°»төНО»ФЪЗ°ЎЈ2ёцИ«Л«№ӨТмІҪҙ®РРНЁРЕҪУҝЪ(SCI)ЎЈ ЎЎЎЎ(10)EEPROДЈҝйУлFLASHДЈҝйMC9S12XE/SДЪІҝјҜіЙБЛ4KBөДEEPROMҙжҙўЖчУл256KBөДFLASHҙжҙўЖчЈ¬ҫЯУРөҘҝйәНХыҝйІБіэЎўұаіМЎўБй»оұЈ»ӨәН°ІИ«№ҰДЬЎўҝмЛЩЗшУтІБіэәНЧЦұаіМДЈКҪМШөгЎЈ ЎЎЎЎ(11)LQFP-112әНQFP-80·вЧ°СЎФсЈәDG128РҫЖ¬ҫЯУР5VөДКдИләНЗэ¶ҜДЬБҰЈ¬ЛьөДCPU№ӨЧчЖөВКҝЙёЯҙп50MHzЈ¬ЧЬПЯЖөВКТІҝЙҙпөҪ25MHzЈ¬ІўҝЙТФЦ§іЦұіҫ°өчКФДЈКҪ(BDM)ЎЈ ЎЎЎЎКөјК№ӨЧчКұРиТӘІЙјҜІаПтјУЛЩ¶Иҙ«ёРЖчЎўіөЛЩРЕәЕәН·ҪПтЕМЧӘҪЗРЕәЕЈ¬ҙ«ёРЖч№ӨЧчКұҙжФЪёчЦЦёЙИЕЈ¬ЖдКдіцөДРЕәЕҙжФЪЧЕёчЦЦФлЙщРЕәЕЈ¬ОӘБЛұЈЦӨРЕәЕөДҝЙҝҝРФРиТӘ¶Фҙ«ёРЖчРЕәЕҪшРРВЛІЁҙҰАнЎЈУІјюөзВ·ЙијЖКұІЙУГҪб№№јтөҘІўЗТР§№ыҪПәГөДҰРРНВЛІЁЎЈ ЎЎЎЎ3.3.3өзФҙПөНіөДЙијЖ ЎЎЎЎУЙУЪіөФШРоөзіШөДөзС№НЁіЈОӘ12 VЈ¬¶ФУЪEHBПөНіЦРөД·ЙЛјҝЁ¶ыөҘЖ¬»ъ¶шСФРиТӘ5VТФј°2.5VөДЦұБчОИ¶ЁөзФҙЎЈұҫЙијЖЦРІЙУГLM2940өзФҙЧӘ»»РҫЖ¬ЎЈЖд·вЧ°ІЙУГTO-220-3өДРОКҪЎЈЖдФКРн№ӨЧчөзС№ОВ¶И-65Ўж~150ЎжЈ¬КдИлөзС№ОӘ26VЈ¬КдіцҝЙөчөзС№·¶О§1.24V~26VЧоҙуКдіцөзБчОӘ3.5AЈ¬өзС№КдіцОуІоРЎУЪ1%Ј¬ХвСщөДөзФҙПөНіЧг№»ВъЧгECUЦРMC9S12XE/S¶ФөзФҙөзС№өДРиЗуЎЈ ЎЎЎЎ3.3.4ПөНіКдИлНЁөАЙијЖ ЎЎЎЎёщҫЭEHBПөНіЦРЛщЙжј°өДёчёцҙ«ёРЖчөД»щұҫАаРНЈ¬ЦчТӘУРҝӘ№ШБҝКдИлРЕәЕҙ«ёРЖчЎўВціеБҝКдИлРЕәЕҙ«ёРЖчЎўДЈДвБҝКдИлРЕәЕҙ«ёРЖчөИИэҙуАаЎЈ ЎЎЎЎ(1)ҝӘ№ШБҝКдИлРЕәЕ ЎЎЎЎҝӘ№ШБҝЦчТӘЦёіЈ№жЦЖ¶ҜЗйҝцПВөДЦч¶ҜҝШЦЖ№ҰДЬЈ¬јЭК»ФұҝЙТФНЁ№эҪЕМӨ°еРРіМҝӘ№ШСЎФсКЗ·сЖфУГХвТ»№ҰДЬЈ¬ТтҙЛКЗТ»ЦЦЦч¶ҜҝШЦЖ№ҰДЬЎЈ ЎЎЎЎ(2)ВціеБҝКдИлРЕәЕ ЎЎЎЎВціеБҝКдИлРЕәЕУРЈәВЦЛЩҙ«ёРЖчВціеРЕәЕЎЈК№УГ¶ЁКұЖчT2әНІ¶»сјДҙжЖчІвБҝБҪёцЙПЙэСШ(»тПВҪөСШ)өДКұјдјдёфЎЈУЙУЪІЙјҜҪшАҙөДПЦіЎРЕәЕЈ¬ИЭТЧКЬөҪ»·ҫіёЙИЕөИТтЛШУ°ПмЈ¬І»ДЬЦұҪУКдИлөҘЖ¬»ъҙҰАнЈ¬ОӘБЛҝ№ёЙИЕЈ¬ҝӘ№ШБҝәНВціеБҝКдИлҫӯ№э№вөзсоәПЖчTLP521УлMC9S12өҘЖ¬»ъБ¬ҪУЎЈTLP521КЗЦұБчКдИлNPNКдіцөД№вөзсоәПЖчФЪөзёфАлөДЗйҝцПВЈ¬ТФ№вөзЧӘ»»ФӯАнҙ«КдРЕПўЈ¬ДЬУРР§ТЦЦЖПөНіФлЙщTLP521ДЪІҝҪб№№УЙ·ў№в¶юј«№ЬәН№вГфИэј«№ЬЧйіЙЎЈ№ӨЧчКұЈ¬°СКдИлРЕәЕјУөҪКдИл¶ЛЈ¬·ў№в¶юј«№ЬІъЙъәмНв№вЈ¬№вГфИэј«№ЬҪУКХ№вәуЈ¬ЖдјҜөзј«Ул·ўЙдј«өјНЁЈ¬КөПЦөзЎӘ№вЎӘөзөДЧӘ»»ЎЈTLP521ЦчТӘУГУЪ№ӨТөҝШЦЖЦРЈ¬ЛЩ¶ИІ»ёЯЈ¬ЦчТӘУГАҙёфАлёчҝӘ№ШБҝРЕәЕЎЈ ЎЎЎЎ(3)ДЈДвБҝКдИлРЕәЕФЪEHBПөНіЦРЈ¬өзҝШПөНіТӘЗуКдИлөДДЈДвБҝУРЈәЦЖ¶ҜУНС№БҰҙ«ёРЖчЈ¬МӨ°еРРіМҙ«ёРЖчөИЈ¬ЖдКдіцөДКЗДЈДвБҝРЕПўЈ¬¶шПөНіЦ»ДЬҙҰАнКэЧЦБҝөДРЕПўЈ¬ТтҙЛТӘ¶ФЖдҪшРРДЈ/КэЧӘ»»Ј¬јҙA/DЧӘ»»ЎЈҝЙТФАыУГMC9S12өҘЖ¬»ъөДA/DЧӘ»»ДЈҝйКөПЦДЈКэЧӘ»»ТФј°КдИлІЙСщЎЈУЙУЪВЛІЁөзВ·ҝЙТФВЛөфДЈДвРЕәЕЦРөДёЯЖөіЙ·ЦЈ¬ДЈДвБҝКдИлРЕәЕҫӯ№эВЛІЁөзВ·Ул·ЙЛјҝЁ¶ыMC9S12өҘЖ¬»ъөДДЈДвБҝІЙСщҝЪПаБ¬ЎЈ ЎЎЎЎ3.3.5ПөНіКдіцНЁөАЙијЖ ЎЎЎЎПөНіКдіцНЁөАөДЙијЖЈ¬ҫНКЗ¶ФEHBПөНіЦҙРР»ъ№№өДҝШЦЖөзВ·өДЙијЖЎЈТтҙЛПөНіҝШЦЖКдіцҫН°ьАЁЈәөзҙЕ·§Зэ¶ҜҝШЦЖөзВ·Ј¬өз»ъЗэ¶ҜҝШЦЖөзВ·ЎЈ ЎЎЎЎөҘЖ¬»ъҝШЦЖөзҙЕ·§ҝӘЎўұХөД№эіМЈ¬ҫНКЗҝШЦЖөзҙЕ·§КЗ·сөГөзөД№эіМЎЈұҫЙијЖАыУГөДMC9S12КдіцөДPWMРЕәЕЧчОӘКдИлЈ¬НЁ№эЗэ¶ҜMOSFET№ЬК№ёЯЛЩҝӘ№Ш·§№ӨЧчЈ¬өзВ·ЦРЗэ¶ҜөзВ·ІЙУГBTS724GРҫЖ¬Ј¬BTS724GРҫЖ¬ОӘN№өөАҙ№Цұ№ҰВКMOSFET№ЬЙијЖөДёЯұЯҝӘ№ШЗэ¶ҜЖчЎЈёЯұЯМхјюПВҝЙЗэ¶ҜёәФШөзС№ОӘ24VөДMOSFET№ҰВК№ЬЎЈBTS724GҫЯУРҝЙКдИлCMOSөДјжИЭРФЎўҪПёЯөДөзҙЕјжИЭРФЎўёРУҰёәФШөДҝмЛЩНЛҙЕРФәНҪПҝнөД№ӨЧчөзС№·¶О§5.5V~40V.BTS724GЧФЙнМṩБЛЗ¶ИлКҪұЈ»ӨіМРтЈ¬өұПөНі№эФШ»төзіШҪУ·ҙПөНіЧФ¶Ҝ№ШұХMOSFET.НЁ№эBTS724GРҫЖ¬Зэ¶ҜөзҙЕ·§өДҝӘ№ШЈ¬КөПЦПөНіөДФцС№ЎўұЈС№ЎўәНјхС№ЎЈ ЎЎЎЎөзҙЕ·§Зэ¶ҜҝШЦЖөз»ъөДЗэ¶ҜҝШЦЖөзВ·КЗНЁ№эҙу№ҰВКMOS№ЬАҙЗэ¶ҜҝШЦЖТәС№ұГөз»ъЈ¬УЙТәС№ұГөз»ъҙш¶ҜТәС№ұГЈ¬ПтёЯС№РоДЬЖч№ЬВ·ЦРЧўИлЦЖ¶ҜКұЛщРиөДёЯС№УНЎЈНј3.11КЗҝӘ·ўөДECUКөОпНј ЎЎЎЎ  ЎЎЎЎ3.3.6КэҫЭІЙјҜПөНіЙијЖ ЎЎЎЎКэҫЭІЙјҜПөНіКЗEHBМЁјЬПөНіЦРәЬЦШТӘөДТ»ёцДЈҝйЈ¬ұҫОДІЙУГөДКэІЙПөНіКЗ»щУЪMATLAB/xPCTargetКөКұКэҫЭІЙјҜПөНіЎЈxPC Target КЗMathWorks№«ЛҫМṩәН·ўРРөДТ»ёц»щУЪRTW(Real Time Workshop)МеПөҝтјЬөДёҪјУІъЖ·Ј¬УГУЪІъЖ·ФӯРНҝӘ·ўЎўІвКФәНЕдЦГКөКұПөНіөДPC»ъҪвҫцНҫҫ¶ЎЈxPCTargetІЙУГБЛҙУЛЮЦч»ъөҪДҝұк»ъөДјјКхНҫҫ¶Ј¬јҙЎ°Л«»ъЎұДЈКҪЈ¬БҪ»ъНЁ№эТФМ«Нш»тҙ®ҝЪҪшРРНЁРЕЎЈ ЎЎЎЎПөНіЦчТӘУЙУІјюПөНіәНИнјюПөНіЧйіЙЈ¬УІјюПөНіЦчТӘУРЛЮЦч»ъ(HostPC)ЎўДҝұк»ъ(TargetPC)ЎўКэҫЭІЙјҜҝЁЎЈИнјюПөНі°ьАЁMATLABЎўSimulinkЎўRTWЎўxPCTargetЎўCұаТлЖчөИЎЈ ЎЎЎЎ(1)ЛЮЦч»ъ(HostPC) ЎЎЎЎЛЮЦч»ъЦчТӘУГУЪФЛРРsimulinkҪЁБўДЈРНОДјюЈ¬ҪшРРДЈРНІОКэөчХыЎўДЈРНөДұаТлПВФШТФј°РЕәЕ№ЫІвЎЈУЙУЪxPCTargetІЙУГЛЮЦч»ъ(HostPC)әНДҝұк»ъ(TargetPC)·ЦАлөДЛ«»ъДЈКҪЎЈЛЮЦч»ъәНДҝұк»ъЦ®јдУРҙ®ҝЪәНТФМ«НшБҪЦЦНЁРЕ·ҪКҪЎЈұҫОДІЙУГЛЩ¶ИҝмЈ¬ҫаАлФ¶өДТФМ«Нш·ҪКҪЎЈУЙУЪТӘ¶ФНЁС¶ЙиұёҪшРРЕдЦГЙъіЙЖф¶ҜИнЕМЎЈТтҙЛТӘЗуЛЮЦч»ъ°ьә¬3.5УўҙзөДИнЗэәНТФМ«НшККЕдҝЁЎЈІЙУГWindowsxpІЩЧчПөНіЈ¬УІјюЕдЦГТӘЗуІ»ёЯЈ¬ҝЙХэіЈФЛРРMATLABіМРтјҙҝЙЎЈ»щУЪЙПКцМхјюОТГЗСЎУГЖХНЁМЁКҪ»ъјҙҝЙЎЈ ЎЎЎЎ(2)Дҝұк»ъ(TargetPC) ЎЎЎЎДҝұк»ъУГУЪЦҙРРЙъіЙөДҙъВлЈ¬Дҝұк»ъФЪК№УГ№эіМЦРЦ»РиҝӘ№Ш»ъІЩЧчјҙҝЙЈ¬ҙЛДҝұк»ъІЙУГУІЕМЖф¶Ҝ·ҪКҪЈ¬ҪПЦ®НЁУГөДИнЕМ»т№вЕМЖф¶ҜёьОИ¶ЁЈ¬Жф¶ҜЛЩ¶ИҝмЎЈОӘБЛЦЖЧчЖф¶ҜЕМәНКФСйКэҫЭІЙјҜЈ¬Дҝұк»ъУҰ°ІЧ°БЛWindows XPәНDOS 7.1ПөНіЈ¬ІўЗТПөНіЕМОӘFAT32ОДјюПөНіЎЈ»щУЪЙПКцМхјюұҫОДІЙУГAdvantech№ӨҝШ»ъЎЈ ЎЎЎЎ(3)КэҫЭІЙјҜ°еҝЁ ЎЎЎЎұҫОДІЙУГөДКЗAdvantech PCL-818HІЙјҜҝЁЎЈPCL-818HКЗТ»ҝо100KHzөД¶а№ҰДЬКэҫЭІЙјҜҝЁЈ¬ДЬ№»МṩЧоіЈУГөДОеЦЦІвБҝәНҝШЦЖ№ҰДЬЈ¬ХвР©№ҰДЬ°ьАЁЈә12О»A/DЧӘ»»ЎўD/AЧӘ»»ЎўКэЧЦБҝКдИлЎўКэЧЦБҝКдіцј°јЖКэЖч/¶ЁКұЖч№ҰДЬЎЈДЈҝйРФДЬМШөгИзПВЈә ЎЎЎЎНЁөАЈә16В·өҘ¶Л»т8В·Іо·ЦКдИл·¶О§Јә ЎЎЎЎЛ«ј«РФЈәЎА0.625VЈ¬ЎА1.25VЈ¬ЎА2.5Ј¬ЎА5VЈ¬ЎА10V ЎЎЎЎКдИл№эФШөзС№ЈәЎА30VDC ЎЎЎЎЧӘ»»АаРНЈәЦрҙОұИҪПРНA/DЧӘ»» ЎЎЎЎЧӘ»»ЛЩВКЈәЧоҙу100KHzҫ«¶ИЈәЎА0.01%(¶БИЎЦө)Ј¬ЎА1О» ЎЎЎЎПЯРФ¶ИЈәЎА1О» ЎЎЎЎҙҘ·ўДЈКҪЈәИнјюҙҘ·ўЎўPacerҙҘ·ўәННвІҝҙҘ·ў ЎЎЎЎКэҫЭҙ«КдЈәіМРтҝШЦЖЎўЦР¶П·ҪКҪәНDMA·ҪКҪ ЎЎЎЎ  ЎЎЎЎҫӯ№эТФЙП¶ФEHBПөНіЦҙРР»ъ№№әНөзЧУҝШЦЖөҘФӘөДЙијЖЈ¬ј°ЖдФӘјюөДСЎРНЈ¬ҪЁБўЖрКөСйМЁИзНј3.12ЛщКҫЎЈ |
НшУСЖАВЫ