
ЛљгкPSoC?4 ЕФPMSMЮоДЋИаЦїЪИСППижЦ
ЗЂВМЪБМфЃК2015-11-12 15:30
ЗЂВМепЃКdesignapp
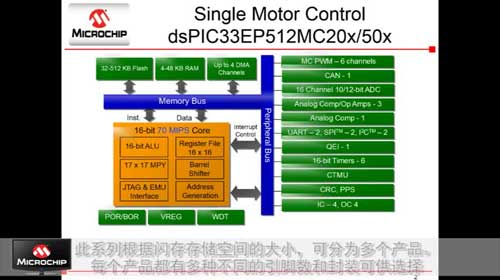
ЁЁЁЁеЊвЊЃКБОЮФНщЩмСЫЛљгкCypress PSoC?4ЦНЬЈЕФPMSMЮоДЋИаЦїFOCНтОіЗНАИЁЃЗНАИВЩгУИФНјЛЌФЃПижЦЦїНјааЮЛжУЙРЫуЃЌПЩгааЇЯћГ§ЖЖеёЯжЯѓ SoC?4ФкВПМЏГЩСНИіжЇГжБШНЯЦїФЃЪНМАSAR ADCЪфШыЛКГхЙІФмЕФдЫЫуЗХДѓЦїЃЌЮоашЭтВПдЫЗХМДПЩЭъГЩЕчСїВЩбљ;ЫФИіПЩжЇГжжабыЖдЦыPWMМАЭЌВНADCВйзїTCPWMФЃПщЃЌПЩСщЛюЭъГЩШ§ЯрЕчЛњЕФПижЦЁЃ SoC?4ФкВПМЏГЩСНИіжЇГжБШНЯЦїФЃЪНМАSAR ADCЪфШыЛКГхЙІФмЕФдЫЫуЗХДѓЦїЃЌЮоашЭтВПдЫЗХМДПЩЭъГЩЕчСїВЩбљ;ЫФИіПЩжЇГжжабыЖдЦыPWMМАЭЌВНADCВйзїTCPWMФЃПщЃЌПЩСщЛюЭъГЩШ§ЯрЕчЛњЕФПижЦЁЃЁЁЁЁЙиМќзжЃКPSoC?4ЃЌЪИСППижЦЃЌЮоДЋИаЦї, ЛЌФЃЙлВтЦї ЁЁЁЁAbstract: This paper introduces the sensorless FOC solution based on Cypress new product PSoC?4. PSoC4 owns rich on-chip resources which can realize high integrated design. With two internal opamplifiers, PSoC4 can implement two phase currents sensing without external chips; Four TCPWMs which support center-aligned PWM and programmable dead zone can flexibly control three-phase inverter. ЁЁЁЁKeywords: PSoC?4ЃЌFOCЃЌSensorless, Slide Mode Observer, Motor control ЁЁ ЁЁЁЁ1. в§бд ЁЁЁЁгРДХЭЌВНЕчЖЏЛњ(PMSM)вђЦфЬхЛ§аЁЁЂжиСПЧсЁЂЙІТЪУмЖШИпЕШгХЕуЖјЙуЗКгІгУгкКНПеЁЂКНЬьЁЂЙЄвЕЕШСьгђЁЃдкPMSMЧ§ЖЏЯЕЭГжа, ЮоЮЛжУДЋИаЦїПеМфЪИСППижЦММЪѕЪЧвЛжжГЩБОЕЭЁЂПЩППадКУЁЂЮЌЛЄМђЕЅЕФПижЦВпТдЃЌБмУтСЫАВзАДЋИаЦї(Шча§зЊБфбЙЦїЁЂБрТыХЬЕШ)ДјРДЕФЯЕЭГЬхЛ§жиСПдіДѓЁЂЮЌЛЄФбЕШЮЪЬтЃЌВЂПЩЪЪгУгквЛаЉЬиЪтГЁКЯЃЌШчПеЕїбЙЫѕЛњЕШЁЃPMSMЮоЮЛжУДЋИаЦїПеМфЪИСППижЦММЪѕЕФФбЕудкгкзЊзгЮЛжУЕФЙРЫу,НќФъРДаэЖрбЇепЖдДЫНјааСЫЩюШыЕФбаОП,ЬсГіСЫКмЖрЗНЗЈ,ШчЗДЕчЖЏЪЦЙ§СуМьВтЁЂИпЦЕзЂШыЗЈЁЂПЈЖћТќТЫВЈЁЂФЃаЭВЮПМздЪЪгІЗЈЁЂИїжжЙлВтЦїЗЈЕШЁЃдкетаЉЗНЗЈжа,ЛЌФЃЙлВтЦїгЩгкЦфТГАєадЧПЁЂЖдЯЕЭГВЮЪ§БфЛЏМАЭтНчШХЖЏВЛУєИаЁЂвзгкЙЄГЬЪЕЯжЕШгХЕу,дкНЛСїЕїЫйЯЕЭГжаЕУЕНСЫЙуЗКЕФгІгУЁЃБОЮФНЋЬжТлЛљгкЛЌФЃЙлВтЦїЕФЮоДЋИаЦїЪИСППижЦММЪѕЁЃ ЁЁЁЁ2. PMSMЮоДЋИаЦїЪИСППижЦдРэ ЁЁЁЁзДЬЌЙлВтЦїЕФЪЕжЪОЭЪЧжиЙЙПижЦЯЕЭГЕФзДЬЌЃЌНЋдЯЕЭГжаПЩвджБНгВтСПЕФБфСПзїЮЊаТЙЙдьЯЕЭГЕФЪфШыаХКХЃЌВЂЪЙЙЙдьаТЯЕЭГЕФЪфГіаХКХдквЛЖЈЬѕМўЯТЕШгкдЯЕЭГЕФзДЬЌЁЃЛЌФЃБфНсЙЙПижЦОЭЪЧИљОнЯЕЭГЕБЧАЕФзДЬЌЕФВЛЭЌЃЌЗДРЁПижЦЦїЕФНсЙЙАДееЪТЯШЙцЖЈЕФПижЦЗЈдђгаФПЕФЕиЁЂВЛЖЯЕиБфЛЏЁЃЭЈЙ§ПижЦЯЕЭГНсЙЙЕФВЛЖЯБфЛЏЃЌзюжеЪЙЕУЯЕЭГЕФНсЙЙвдМЋИпЕФЦЕТЪРДЛиЧаЛЛЃЌЯЕЭГЕФзДЬЌЕузіИпЦЕЕФЩЯЯТДЉдНдЫЖЏМДЛЌФЃдЫааЁЃгЩгкБфНсЙЙПижЦЕФетжжЖРЬиЕФВЛСЌајЕФПижЦЬиЕуЃЌЫќЖдБЛПиЖдЯѓЕФЪ§бЇФЃаЭЕФОЋШЗГЬЖШвЊЧѓВЛИпЃЌгШЦфЪЧдкПижЦЙ§ГЬжаБЛПиЖдЯѓВЮЪ§ЕФБфЛЏКЭЭтВПИЩШХЃЌетаЉЖМВЛЛсЖдБфНсЙЙПижЦЕФПижЦОЋЖШВњЩњНЯДѓЕФгАЯьЃЌМДБфНсЙЙПижЦЖдЭтНчЕФИЩШХгаКмЧПЕФТГАєадЁЃ ЁЁЁЁБфНсЙЙПижЦЕФЛљБОдРэЪЧЃКдкБфНсЙЙПижЦжаЃЌПижЦСПИљОнЩшЖЈЕФПижЦЗЈдђдкu+(x) Лђu?(x) жЎМфЧаЛЛ. БфНсЙЙПижЦОЭЪЧИљОнЯЕЭГЕБЧАЕФзДЬЌЕФВЛЭЌЃЌЗДРЁПижЦЦїЕФНсЙЙАДееЪТЯШЙцЖЈЕФПижЦЗЈдђгаФПЕФЕиЁЂВЛЖЯЕиБфЛЏЃЌзюжеЪЙЕУЯЕЭГЕФНсЙЙвдМЋИпЕФЦЕТЪВЛЭЃЕиРДЛиЧаЛЛЃЌЯЕЭГЕФдЫЖЏЕудђвдМЋаЁЕФЗљЖШКЭМЋИпЕФЦЕТЪдкS(x)=0 ЩЯЯТДЉдНЁЃетжжЬиЪтЕФзДЬЌНазіЁАЛЌФЃзДЬЌЁБЁЃДЫЪБЃЌетжжБфНсЙЙПижЦОЭНаЛЌФЃБфНсЙЙПижЦЁЃДЫЪБЃЌГЦS(x)=0 БЛГЦзїЛЌФЃУцЃЌS=S(x) ЮЊЧаЛЛКЏЪ§ЁЃ ЁЁЁЁЛЌФЃЙлВтЦїЩшМЦ 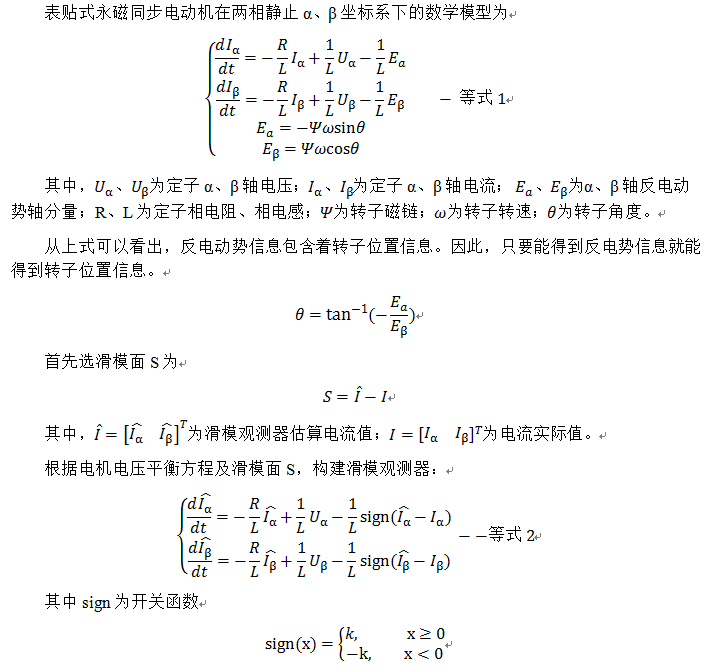 ЕШЪН2МѕШЅЕШЪН1ПЩЕУЃК 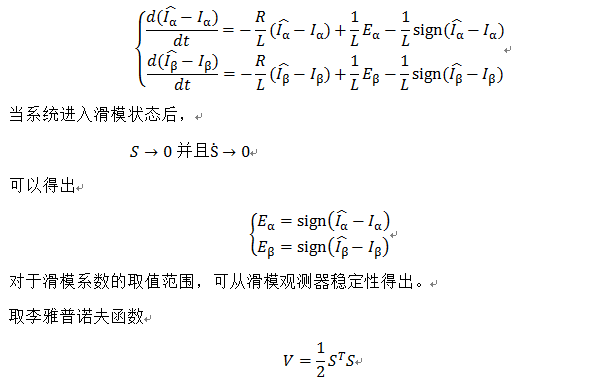  ЁЁЁЁЮоДЋИаЦїЪИСППижЦ  ЁЁЁЁЭМ1 ЮоДЋИаЦїFOCПижЦПђЭМ ЁЁЁЁЭМ1ЮЊЮоДЋИаЦїFOCПижЦПђЭМЁЃећИіFOCПижЦЕФКЫаФЪЧзјБъБфЛЛЃЌЭЈЙ§зјБъБфЛЛНЋВЩбљЫљЕУЕФШ§ЯрЕчСїзЊЛЛГЩзЊОиЕчСїЗжСПi_qКЭДХЭЈЕчСїЗжСПi_dЁЃЭЈЙ§PIПижЦЦїЗжБ№Ждi_qКЭi_dНјааПижЦЃЌВЂНЋi_dЕФВЮПМжЕЩшжУЮЊ0ЪЕЯжзюДѓзЊОиПижЦЁЃШ§ЯрЕчСїВЩбљжиЙЙКѓОЙ§ЛЌФЃЙлВтЦїЃЌвЛЗНУцЛёЕУзЊзгЮЛжУНЧЃЌгУгкзјБъБфЛЛЃЌСэвЛЗНУцПЩРћгУНЧЖШаХЯЂЛёШЁЫйЖШаХЯЂЃЌгУгкЫйЖШПижЦЁЃзюКѓЭЈЙ§FOC SVPWMЗЈЖдШ§ЯрФцБфЦїНјааПижЦЃЌЪЕЯжФцБфЧ§ЖЏPMSMдЫааЁЃ ЁЁЁЁ1. ЛљгкPSoC?4 ЕФЮоДЋИаЦїЪИСППижЦЗНАИ ЁЁЁЁPSoC4МђНщ ЁЁЁЁPSoC?4 ЪЧЛљгкARM Cortex-M0 CPUЕФПЩБрГЬЧЖШыЪНЯЕЭГПижЦЦїМвзхЃЌЫќМЏКЯСЫПЩБрГЬФЃФтзЪдДЁЂПЩБрГЬФкВПЛЅСЊЁЂгУЛЇПЩБрГЬЪ§зжТпМЁЂЭЈгУЕФЙЬЖЈЙІФмЭтЩшМЦвдМАИпадФмЕФARM Cortex-M0 CPUзгЯЕЭГЁЃЯрЖдгкPSoC3ЁЂPSoC5ЯЕСаВњЦЗЕФИїИіЗНУц, PSoC?4ЖМзіСЫКмДѓЕФИФНјЁЃPSoC?4ЯжАќКЌCY8C4100 КЭCYCY8C4200СНИіВњЦЗЯЕСаЃЌPSoC4100ЯЕСаЪЧЛљгкARMФкКЫЕФзюЕЭГЩБОЕФPSoCЃЌЫќНЋPSoCЕФСщЛюадКЭИпМЏГЩЖШв§ШыЖдГЩБОУєИаЕФДѓХњСПЩњВњЕФВњЦЗжаЁЃPSoC4200ЯЕСагЕгаЫйЖШИќПьЕФДІРэЦїЃЌИќИпЕФADCВЩбљЫйЖШЃЌвдМАЛљгкPLDЕФдіЧПаЭЭЈгУЪ§зжФЃПщ(UDB)ЁЃвдЯТИХРЈСЫЦфжївЊЬиадЁЃ ЁЁЁЁЁЄ ИпадФм Cortex-M0 CPU ФкКЫЁЃЛљгк48 MHz ARM Cortex?-M0 жабыДІРэЦї , жЇГжЕЅжмЦкГЫЗЈЁЃ ЁЁЁЁЁЄ ЙЬЖЈЙІФмвдМАПЩХфжУЕФЪ§зжФЃПщЁЃАќРЈЫФИіЖРСЂЕФПЩжЇГжжабыЖдЦыЕФPWMЃЌжЇГжЛЅВЙЕФПЩБрГЬЫРЧјМАЭЌВНADCВйзї;СНИіПЩЙЄзїЮЊSPI/UART/I2C ДЎааЭЈаХНгПкЕФДЎааЭЈаХФЃПщ(SCB); ЁЁЁЁЁЄ ИпадФмФЃФтЯЕЭГЁЃАќРЈвЛИіжЇГжСуПЊЯњЭЈЕРЧаЛЛЙІФмЕФ12ЮЛ1 Msps ADC; СНИіжЇГжБШНЯЦїФЃЪНМАSAR ADCЪфШыЛКГхЙІФмЕФдЫЫуЗХДѓЦї; СНИіЕЭЙІКФБШНЯЦї;вЛИіЕчШнИагІ(CapSense)ФЃПщЃЌЬсЙЉМЋМбЕФаХдыБШКЭЗРЫЎЙІФм;СНИіЕчСїЪ§ФЃзЊЛЛЦї (IDAC)ЁЃ ЁЁЁЁЁЄ ИпЖШПЩБрГЬЕФЪ§зжТпМЁЃЫФИіПЩБрГЬЪ§зжТпМФЃПщ(UDB)ЃЌУПИіАќКЌСНИіЮЂаЭЕФПЩБрГЬТпМеѓСаКЭвЛИі8ЮЛЪ§ОндЫЫуЕЅдЊ ЁЃ ЁЁЁЁЁЄ СщЛюПЩБрГЬЕФФкВПЛЅСЌЁЃ ЁЁЁЁЛљгкPSoC4ЕФЮоДЋИаЦїЪИСППижЦЗНАИ ЁЁЁЁPSoC4?ФкВПМЏГЩЫФИіЖРСЂЕФПЩжЇГжжабыЖдЦыЁЂЛЅВЙЕФПЩБрГЬЫРЧјМАЭЌВНADCВйзїЕФTCPWMФЃПщ;вЛИіжЇГжСуПЊЯњЭЈЕРЧаЛЛЙІФмЕФ12ЮЛ1 Msps ADC; СНИіжЇГжБШНЯЦїФЃЪНМАSAR ADCЪфШыЛКГхЙІФмЕФдЫЫуЗХДѓЦїЁЃЗсИЛЕФЦЌФкзЪдДПЩНЋжїПиЕчТЗЫљашаОЦЌМЏГЩЕНвЛЦЌаОЦЌжаЃЌЪЕЯжИпЖШМЏГЩЛЏЁЃЭМ2ЯдЪОСЫPSoC4ЮоДЋИаЦїFOCгВМўПижЦПђЭМЁЃ 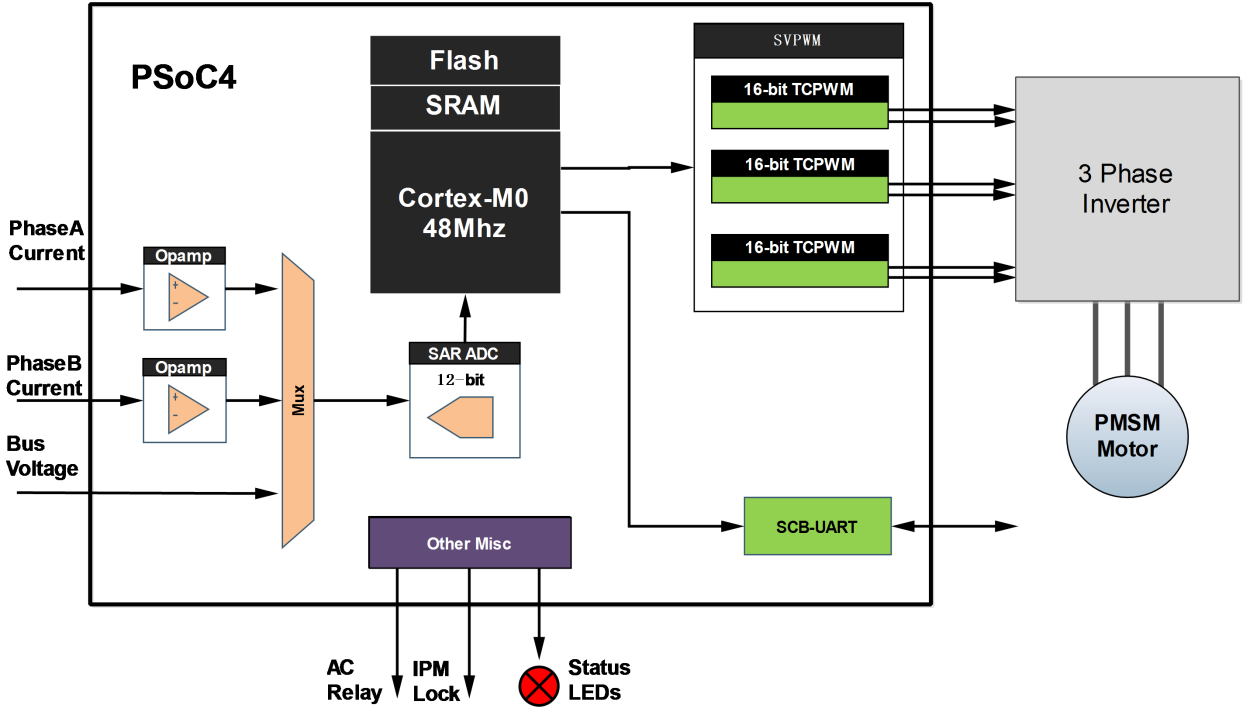 ЁЁЁЁЭМ2 PSoC4 ЮоДЋИаЦїFOCгВМўПижЦПђЭМ ЁЁЁЁЕчСїМьВтЕчзшЩЯЕФаХКХжБНгНјШыPSoC4ФкВПдЫЫуЗХДѓЦїЃЌОЗХДѓКѓЭЈЙ§ФкВПФЃФтЖрТЗбЁдёЦїНјШыИпЫйSAR ADCВЩбљЁЃВЩбљКѓгЩCortex-M0НјааFOCЫуЗЈМЦЫуЃЌИќаТTCPWMеМПеБШЃЌЧ§ЖЏPMSMдЫзЊЁЃ ЁЁЁЁЯрЖдгкЦфЫћНтОіЗНАИЃЌЛљгкPSoC4ЕФЮоДЋИаЦїFOCНтОіЗНАИОпгавдЯТЬиЕугХЪЦЃК ЁЁЁЁ1) ВЩгУИпадМлБШЕФCortex-M0ФкКЫЁЃCortex-M0ЪЧЪаГЁЩЯЯжгаЕФзюаЁЁЂзюНкФмЕФARMДІРэЦїЃЌДњТыеМгУПеМфаЁЃЌФмвд8ЮЛДІРэЦїЕФМлИёЛёЕУ32ЮЛДІРэЦїЕФадФмЃЌПЩУїЯдНкдМЯЕЭГГЩБОЁЃ ЁЁЁЁ2) ФкВПМЏГЩСНИіжЇГжБШНЯЦїФЃЪНМАSAR ADCЪфШыЛКГхЙІФмЕФдЫЫуЗХДѓЦїЁЃФПЧАЪаГЁДѓВПЗжНтОіЗНАИОљашЭтВПдЫЗХЭъГЩЕчСїВЩбљЃЌВЩгУPSoC4ПЩДгЯЕЭГBOMБэжавЦГ§ЭтВПдЫЗХЃЌМѕЩйЯЕЭГГЩБОЁЃ ЁЁЁЁ3) ФкВПМЏГЩСНИіЕЭЙІКФБШНЯЦїЃЌПЩгУгкгВМўБЃЛЄЛђДэЮѓаХКХДІРэЁЃЪаГЁГЃгУНтОіЗНАИДѓВПЗжВЩгУЭтВПБШНЯЦїЭъГЩДЫЙІФмЁЃВЩгУPSoC4ПЩНјвЛВНМѕЩйBOMЃЌНЕЕЭГЩБОЁЃ ЁЁЁЁ4) МѕЩйPCBПеМфМАBOMГЩБОЁЃгЩгкPSoC4МЏГЩСЫЕчЛњПижЦЫљашДѓВПЗжЭтЩшМАЦфЫћЗсИЛЕФФЃПщЃЌПЩЪЕЯжИпЖШМЏГЩЛЏЕФЩшМЦЁЃ ЁЁЁЁ5) ЙЬМўIPБЃЛЄЁЃPSoCЬсЙЉСЫМЋЧПЕФШэМў/гВМўIPБЃЛЄФмСІЃЌетЖдЕчЛњгІгУгШЦфживЊЁЃ ЁЁЁЁ6) СщЛюЕФЭЈбЖНгПкЁЃPSoCЬиЪтЕФПЩБрГЬМмЙЙЬсЙЉСЫМЋЮЊСщЛюЕФЭЈбЖНгПкЃЌПЩТњзуИїжжгІгУЕФашЧѓЁЃ ЁЁЁЁЛљгкPSoC4ЕФЩшМЦЪЕР§ ЁЁЁЁPSoC 4ВЩгУPSoC CreatorМЏГЩЩшМЦЛЗОГЃЌPSoC CreatorдЪаэгУЛЇЭЯЗХдЄЯШХфжУКУЕФЁЂПЩЫцЪБЭЖВњЕФФЃФтКЭЪ§зжIPФЃПщЃЌвВОЭЪЧPSoCзщМўЕНздМКЕФЩшМЦжЎжаЃЌВЂНЋЦфАДееЖржжгІгУашЧѓНјааХфжУЃЌЪЕЯжШэгВМўаЭЌЩшМЦЃЌДДНЈеце§ЪєгкздМКЕФЦїМўЁЃPSoC4ФмЬсЙЉЪ§ЪЎжжУтЗбЕФPSoCзщМў(Components?), ПЩЪЪгУгкКмЖрРргІгУ. ЁЁЁЁ1) дРэЭМЩшМЦ ЁЁЁЁжїПиЕчТЗВПЗжзюКЫаФЕФгаСНВПЗжЃКPWMМАЕчСїВЩбљЃЌЮвУЧНЋжиЕуЬжТлзХСНВПЗжЕФЩшМЦЙ§ГЬЁЃгыPSoC3ЁЂPSoC5ЯрБШЃЌPSoC4діЧПTCPWMФЃПщЕФЙІФмЁЃTCPWMАќРЈЫФИі16ЮЛЕФжмЦкГЄЖШгУЛЇПЩБрГЬЕФМЦЪ§ЦїЃЌетаЉМЦЪ§ЦїжЎМфПЩвдНјааЙІФмЭЌВНЁЃУПИіФЃПщАќКЌвЛИіВЖЛёМФДцЦїЁЂвЛИіжмЦкМФДцЦївдМАвЛаЉБШНЯМФДцЦїЁЃУПИіФЃПщЖМжЇГжЛЅВЙЕФПЩБрГЬЕФЫРЧјЃЌЛЙжЇГжвЛИіЙиЖЯЪфШыаХКХРДЧПЦШЪфГіаХКХНјШыдЄЯШЩшЖЈЕФзДЬЌЁЃ ЁЁЁЁШчЭМ3ЫљЪОЃЌДгPSoC CreatorжаЭЯЗХШ§ИіTCPWMФЃПщЃЌХфжУTCPWMЕФЙЄзїФЃЪНЮЊжабыЖдЦыЃЌДјЫРЧјЕФЫЋТЗЛЅВЙЪфГіФЃЪНЁЃШ§ЖдPWMЪфГіПЩЗжБ№зїЮЊUЁЂVКЭWЯрЧХБлЧ§ЖЏаХКХ(ШчPWM_U_Upper, PWM_U_Lower)ЁЃЭЌЪБдкШЮвЛTCPWMФЃПщЕФUNЪТМўЪфГі(ЯТвчаХКХЃЌгУРДжИЪОМЦЪ§ЦїЯђЯТМЦЪ§ДяЕНЁА0ЁБ)ДЅЗЂPWMжаЖЯ(PWM_MainLoop_ISR)ЃЌгУгкНјааFOCМЦЫуВЂИќаТеМПеБШЃЌЭЌЪБдкШЮвЛTCPWMФЃПщЕФOVЪТМўЪфГі(ЩЯвчаХКХЃЌгУРДжИЪОМЦЪ§ЦїЯђЩЯМЦЪ§ДяЕНжмЦкМФДцЦїжаЕФжЕ)ДЅЗЂADCжаЖЯЃЌгУгкВЩбљЯрЕчСїМАФИЯпЕчбЙЕШЁЃЭМжаЕФПижЦМФДцЦї(PWM_Ctrl_Reg)ЛЙПЩвдЭЌЪБЪЙФмЛђНћжЙСљТЗPWMЪфГіЁЃPSoCСщЛюЕФПЩБрГЬЬиадПЩЧсЫЩЪЕЯжСЫШ§ЖдбЯИёЭЌВНЕФЛЅВЙЖдГЦPWMМАЦфИќаТТпМЃЌетбљПЩвдЪЙЙЄГЬЪІНЋИќЖрЕФЪБМфзЈзЂгкЫуЗЈВуУцЃЌЬсЙЉВњЦЗЕФОКељСІЁЃ  ЁЁЁЁЭМ3Ш§ЯрPWMдРэЭМ ЁЁЁЁВЩбљВПЗжжївЊИКд№ЭъГЩСНЯрЕчСїМАФИЯпЕчбЙВЩбљЁЃШчЭМ4ЫљЪОЃЌЕчСїМьВтЕчзшЩЯЕФаХКХжБНгНјШыаОЦЌФкВПдЫЗХЗХДѓЦї(Opamp_1, Opamp_2)ЃЌЕчТЗаЮЪНВЩгУВюЗжЗХДѓаЮЪНЃЌЯрЙизшШндкаОЦЌЭтВПЁЃаХКХОЗХДѓЦїЗХДѓКѓжБНггЩФкВПНјШыSAR ADCФЃПщНјааВЩбљЁЃSAR ADCФЃПщФмЙЛЪЕЯжзюИп1MspsЕФЕЅЭЈЕРВЩбљЃЌжЇГжСуПЊЯњЭЈЕРЧаЛЛЙІФмЁЃ 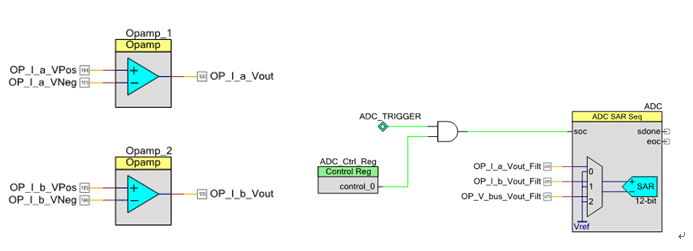 ЁЁЁЁЭМ4 ВЩбљВПЗждРэЭМ ЁЁЁЁ2) ГЬађЩшМЦ ЁЁЁЁжїПиГЬађЪзЯШЛсГѕЪМЛЏКЭХфжУPSoC?4ЕФФкВПзЪдДЃЌШЛКѓНјШыжїбЛЗЁЃжїбЛЗжївЊМьВтгУЛЇЕФЦ№ЭЃУќСюКЭЫйЖШИјЖЈЃЌОіЖЈЕчЛњЕФдЫЖЏзДЬЌ;ВЂЭъГЩвЛЖЈЕФЕїЪдЪфГіЙІФмЁЃFOCжїЫуЗЈШЋВПдкPWMжаЖЯжаЭъГЩЃЌжївЊЭъГЩЖСШЁADCВЩбљНсЙћЃЌЭъГЩзјБъБфЛЛЃЌPIDПижЦЃЌSVPWMЪфГіМАИќаТеМПеБШЕШВйзїЁЃОпЬхСїГЬЭМШчЭМ5ЫљЪОЁЃ 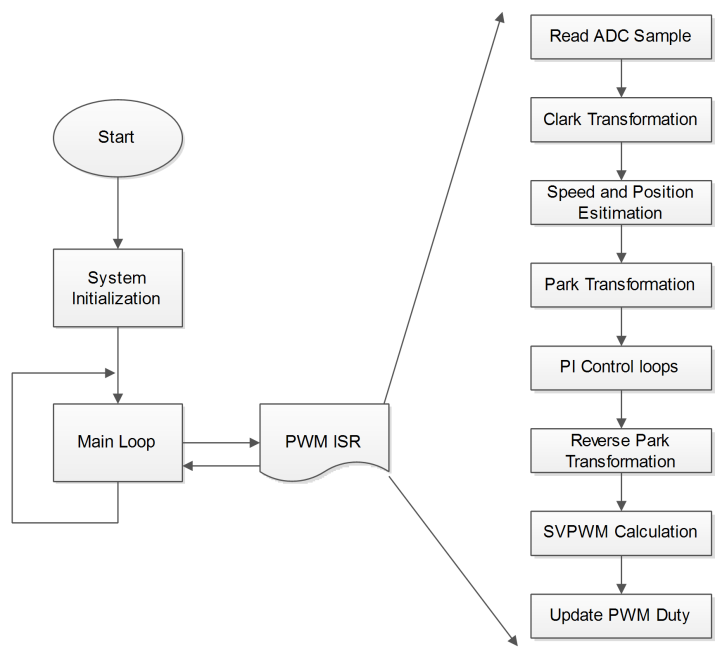 ЁЁЁЁЭМ5 ГЬађСїГЬЭМ ЁЁЁЁ3) ЪЕбщНсЙћ ЁЁЁЁдкPSoC CreatorЛЗОГЯТБрвыЙЄГЬЃЌВЂСЌНгPSoC4ПЊЗЂАхЃЌШ§ЯрШЋЧХЧ§ЖЏАхгыPMSMЕчЛњЃЌЭЈЕчКѓЕчЛњПЩе§ГЃдЫааЁЃЭМ6ЯдЪОСЫЕчЛњЯрЕчСїВЈаЮЁЃДгВтЪдНсЙћПЩвдПДГіЃЌЕчСїВЈаЮЦНЛЌЃЌе§ЯвЖШКмКУЁЃ  ЁЁЁЁЭМ6 ЯрЕчСїВЈаЮЭМ ЁЁЁЁ2. аЁНс ЁЁЁЁЩЯЪіЪЕР§НщЩмСЫШчКЮдкPSoC?4 ЦНЬЈЩЯЪЕЯжPMSMЮоДЋИаЦїЪИСППижЦЁЃPSoC?4зїЮЊCypressзюаТЭЦГіЕФВњЦЗЃЌеыЖдЕчЛњПижЦзіГіСЫИЛгаЬиЩЋЕФгХЛЏЁЃЦОНшЦЌФкЗсИЛЕФзЪдДМАИпЖШЕФСщЛюадЃЌгУЛЇПЩвдЧсЫЩЩшМЦГіИпЖШМЏГЩЛЏЁЂЕЭГЩБОЁЂадФмгХдНЕФPMSMЪИСППижЦЯЕЭГЃЌЬсИпВњЦЗЕФКЫаФОКељСІЁЃ ЁЁЁЁВЮПМЮФЯз ЁЁЁЁ[1]. PSoC? 4: PSoC 4100 Family Datasheet ЁЁЁЁ[2]. PSoC? 4: PSoC 4200 Family Datasheet ЁЁЁЁ[3]. PSoC? 4 Architecture TRM ЁЁЁЁ[4]. PSoC 4100/4200 Family PSoC? 4 Registers TRM (Technical Reference Manual) ЁЁЁЁ[5]. AN79953 - Getting Started with PSoC? 4 |



ЭјгбЦРТл