
»щУЪCANЧЬПЯµДЧФ¶Ї№вС§јмІвНЁРЕПµНіЙијЖ
·ўІјК±јдЈє2015-11-12 11:16
·ўІјХЯЈєdesignapp
|
ЎЎЎЎФЪПЦґъ№¤ТµЧФ¶Ї»ЇЙъІъЦРЈ¬Йжј°µЅёчЦЦёчСщµДјмСйЎўЙъІъјаїШј°БгјюІвБїЎўК¶±рУ¦УГµИ»·ЅЪЈ¬И»¶шНЁіЈИЛСЫєЬДСБ¬РшЎўОИ¶ЁµШНкіЙХвР©ґшУРёЯ¶ИЦШёґРФєНЦЗДЬРФµД№¤ЧчЈ¬Т»°гОпАнБїґ«ёРЖчТІЅПДСКµПЦХвР©№¦ДЬЎЈ¶шАыУГ№вµзіЙПсПµНіІЙјЇ±»јмІвДї±кµДНјПсЈ¬ІўѕјЖЛг»ъ»тЧЁУГµДНјПсґ¦АнДЈїйЅшРРКэЧЦ»Їґ¦АнЎЈУлТ»°гНјПсґ¦АнПµНіПа±ИЈ¬ЧФ¶Ї№вС§јмІвёьЗїµчѕ«¶ИЎўЛЩ¶ИЈ¬ТФј°№¤ТµПЦіЎ»·ѕіПВµДїЙїїРФЎЈТтґЛЈ¬ХвАпМбіцТ»ЦЦ»щУЪCANЧЬПЯµДЧФ¶Ї№вС§јмІвНЁРЕПµНіЙијЖ·Ѕ°ёЈ¬ёГПµНіЙијЖДЬ№»ВъЧгPCBЧФ¶Ї№вС§јмІвїШЦЖПµНіµДЦё±кТЄЗуЎЈ ЎЎЎЎ1 ЧФ¶Ї№вС§јмІвНЁРЕПµНі·ЦОц ЎЎЎЎЧФ¶Ї№вС§јмІвПµНіѕЯУРїмЛЩЧјИ·ЎўїЙЦШёґРФЗїТФј°ЧФ¶Ї»ЇіМ¶ИёЯµИМШµгЎЈЧФ¶Ї№вС§јмІвјјКхµДіцПЦј«ґуµШјхЗбБЛИЛ№¤јмІвµДС№Б¦Ј¬ЅвѕцБЛґ«НіИЛ№¤јмІвЦРµДРн¶аОКМвЈ¬МбёЯБЛІъЖ·µДјмІвЦКБїєНЛЩ¶ИЈ¬ОЄ№¤ТµБмУтЧФ¶ЇјмІвМṩБЛёпГьРФµДЅвѕц·Ѕ°ёЎЈ ЎЎЎЎ·ЦІјКЅµДПЦіЎЧЬПЯДЬН¬К±ВъЧг№эіМїШЦЖєНЦЖФмТµЧФ¶Ї»ЇµДРиТЄЈ¬іЙОЄБЛёГЧФ¶Ї№вС§јмІвПµНіµДЧојССЎФсЎЈ·ЦІјКЅµДПЦіЎЧЬПЯїШЦЖПµНі±ИјЇЙўРНїШЦЖПµНіёьєГµШМеПЦБЛ Ў°РЕПўјЇЦРЎўїШЦЖ·ЦЙўЎ±µДМШµгЎЈЗТ·ЦІјКЅїШЦЖПµНіФЪККУГ·¶О§ЎўїЙА©Х№РФЎўїШЦЖЛЩ¶ИЎўПµНіДЈїй»ЇЎўїЙО¬»¤РФЎўї№µҐµг№КХПµИ·ЅГжѕЯУРГчПФУЕКЖЎЈ ЎЎЎЎїШЦЖЖчѕЦУтНш(CAN)ЧЬПЯКЗТ»ЦЦФЪ№¤ТµїШЦЖЦРУ¦УГµДЧЬПЯЈ¬ґшїнАыУГВКёЯЈ¬ѕАґнДЬБ¦ЗїЈ¬ІўЗТ·ПіэБЛґ«НіµДХѕµШЦ·±аВлЈ¬ІЙУГ¶ФНЁРЕКэѕЭїйЅшРР±аВлЈ¬їЙТФ¶аЦч·ЅКЅ№¤Чч;ФЛУГ·ЗЖЖ»µРФЦЩІГјјКхЈ¬УРР§±ЬГвБЛЧЬПЯіеН»;¶МЦЎЅб№№Ј¬КэѕЭґ«КдК±јд¶МЈ¬КЬёЙИЕµДёЕВКµНЈ¬ЦШРВ·ўЛНµДК±јд¶М;ГїЦЎКэѕЭ¶јУРCRCРЈСйј°ЖдЛыјмґнґлК©Ј¬±ЈЦ¤БЛКэѕЭґ«КдµДёЯїЙїїРФЈ¬ККУГУЪёЯёЙИЕ»·ѕіПВ;ЅЪµгФЪґнОуСПЦШµДЗйїцПВЈ¬ѕЯУРЧФ¶Ї ЎЎЎЎ№Ш±ХЧЬПЯ№¦ДЬЈ¬К№ЧЬПЯЙПЖдЛыІЩЧчІ»КЬУ°Пм;їЙТФµг¶ФµгЈ¬Т»¶Ф¶ај°№гІҐјЇЦР·ЅКЅґ«ЛНєНЅУКХКэѕЭЎЈТтґЛЈ¬CANЧЬПЯВъЧгёГїШЦЖПµНіµДКэѕЭЧЬПЯТЄЗуЎЈ ЎЎЎЎ±ѕЙијЖІЙУГУў·ЙБиїЄ·ўµД16О»ОўїШЦЖЖчПµБРЦРµДXCl64CSОЄїШЦЖЖчЈ¬ІўіЙ№¦µШЅ«ЖдУ¦УГµЅPCB°еГжИ±ПЭЧФ¶Ї№вС§јмІвТЗµДїШЦЖПµНіЎЈ ЎЎЎЎ2 НЁРЕПµНіЧЬМеЙијЖ·Ѕ°ё ЎЎЎЎ2.1 ПµНіЧйіЙФАн ЎЎЎЎЧФ¶Ї№вС§јмІвПµНіУЙЙП°еІї·ЦЎўЙЁГиХэГжЎўЙЁГи·ґГжЎў·Цјр1Ўў·Цјр2ТФј°Цч»ъ№І6Ії·ЦЧйіЙЈ¬ХыёцПµНіК№УГµДµз»ъУР5Аа№І19ёцЎўЖшёЧ11ёцТФј°ёчАаґ«ёРЧ°ЦГИфёЙЎЈХыёцПµНіјЬ№№ИзНј1ЛщКѕЎЈ ЎЎЎЎ 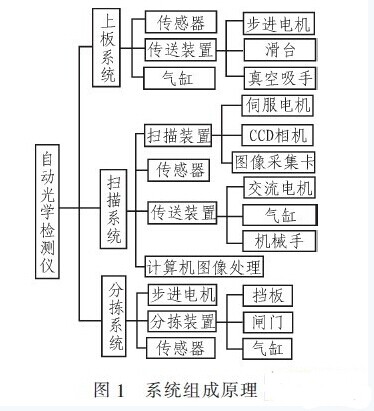 ЎЎЎЎУЙУЪХыёцїШЦЖПµНі¶ФКµК±РФЎўОИ¶ЁРФТФј°РµчРФТЄЗуєЬёЯЈ¬ХыёцїШЦЖДЈКЅ·ЦОЄЦЖЧч±кЧј°еДЈКЅЎўµҐІЅФЛРРДЈКЅТФј°јмІвДЈКЅЈ¬¶ФУЪДЈКЅјдЧЄ»»µДБй»оРФТЄЗуТІєЬёЯЎЈ¶ш·ЦІјКЅїШЦЖПµНіТтЖдѕЯУРёЯїЙїїРФЎўїЄ·ЕРФЎўБй»оРФЎўРµчРФЎўїШЦЖ№¦ДЬЖлИ«єНТЧУЪО¬»¤µИМШµгЈ¬НкИ«ВъЧг±ѕїШЦЖПµНіµДТЄЗуЎЈ ЎЎЎЎ·ЦІјКЅїШЦЖПµНіК№УГЅП¶аµДНшВзНШЖЛЅб№№УРРЗРНЎў»·РНєНЧЬПЯРН3ЦЦЎЈЖдЦРРЗРНЅб№№(ЦРСлїШЦЖРН)ЦРЛщУРНЁРЕ¶јѕЦРСлїШЦЖЅЪµгЈ¬ИфЦРСлїШЦЖЅЪµгУР№КХПЈ¬ФтХыёцПµНіѕН»бМ±»ѕ;»·РНЅб№№ЦРПаБЪїШЦЖЅЪµгЛіРтБ¬ЅУЈ¬РОіЙ»·В·Ј¬РЕПўТ»°гЅцТФТ»ёц·ЅПтФЪ»·ЙПґУФґЅЪµгґ«ЛНµЅДїµДЅЪµгЈ¬·ўЙъ№КХПК±їЙЦ§іЦЛ«Птґ«КдЈ¬µ«»·В·Т»°г·в±ХЈ¬І»АыУЪЅЪµгµДА©ід;¶шЧЬПЯРНЅб№№µДЛщУРЅЪµг¶ј№ІПнТ»ёц№«№ІµДОпАнНЁµА(јґЧЬПЯ)Ј¬ТтґЛНшВзЙПµДИОТвТ»ёцЅЪµгѕщїЙФЪИОТвК±їМЦч¶ЇПтНшВзЙПµДЖдЛыЅЪµг·ўЛНРЕПўЈ¬ЗТѕЯУРСУіЩРЎЎўЛЩ¶ИїмЎўТЧА©Х№ЎўµҐёцЅЪµг№КХПУ°ПмРЎµДУЕµгЎЈТтґЛЈ¬ёГїШЦЖПµНіІЙУГЧЬПЯРННШЖЛЅб№№Ј¬ИзНј2ЛщКѕЎЈ ЎЎЎЎ 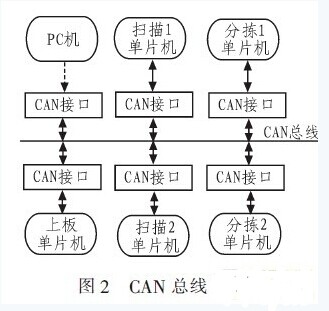 ЎЎЎЎ2.2 CANЧЬПЯУІјюµзВ·ЙијЖ ЎЎЎЎОЄБЛ±ЈЦ¤їШЦЖПµНіµДјјКхЦё±кЈ¬НкіЙКµК±КэѕЭґ¦АнєНµзВ·±Ј»¤№¦ДЬЈ¬ІўїјВЗµЅПµНіµДА©Х№РФЈ¬ІЙУГ16О»ОўїШЦЖЖчПµБРЦРµДXCl64CSЎЈёГРѕЖ¬іЯґзРЎЎўФЛЛгЛЩ¶ИёЯЈ¬ІўјЇіЙУРTwinCANДЈїйЈ¬ёГДЈїйУГУЪїШЦЖЦЎµДЧФ¶Ї·ўЛНєНЅУКХЎЈёГДЈїйУР2ёцИ«№¦ДЬµДCANЅЪµг№ІПнДЈїйµДЧКФґЈ¬Мṩ32ёц±ЁОД¶ФПуЈ¬ЛьГЗїЙ¶АБў·ЦЕдёш2ёцCANЅЪµгЦРµДИОТвТ»ёцЈ¬»№їЙТФЧйєП№№іЙFIFOЅб№№ЎЈГїёц±ЁОД¶ФПу·Ц±р¶ФУ¦УРАыУЪВЛІЁµДСйКХЖБ±ОјДґжЖчЎЈ ЎЎЎЎИ«CAN№¦ДЬєНFIFOЅб№№µДБй»оЧйєПїЙВъЧгёґФУЗ¶ИлКЅїШЦЖУ¦УГµДКµК±ТЄЗуЎЈCANЧЬПЯјаїШ№¦ДЬµДФцЗїТФј°±ЁОД¶ФПуёцКэµДФцјУК№µГCANµДЧЬПЯНЁРЕґ¦АнёьјУѕ«И·єН·Ѕ±гЎЈНш№Ш№¦ДЬФКРнФЪ2ёц¶АБўµДCANЧЬПЯПµНіЦ®јдЅшРРЧФ¶ЇКэѕЭЅ»»»Ј¬јхЗбБЛCPUёєФШЈ¬МбёЯБЛХыёцПµНіµДКµК±РФЎЈ2ёцCANЅЪµгµДО»¶ЁК±¶јґУЦчК±ЦУµГµЅЈ¬їЙНЁ№э±аіМК№КэѕЭЛЩВКґпµЅ1 Mb/sЈ¬ ЎЎЎЎCANЧЬПЯКХ·ўЖчІЙУГУў·ЙБ蹫˾µДTLE6250GЈ¬Ц§іЦґ«ЛНЛЩВКёЯґп1 Mb/sЈ¬ѕЯУРї№ЛІ±дЎўї№ЙдЖµєНї№µзґЕёЙИЕµДМШРФЈ¬ІўѕЯУРїн·єµД№¤Чч·¶О§(-40Ў«150Ўж)Ј¬ТФј°¶МВ·±Ј»¤єН№эОВ±Ј»¤№¦ДЬЎЈѕЯМеµДCANЧЬПЯЅЪµгФАнНјЙијЖИзНј3ЛщКѕЎЈ ЎЎЎЎ 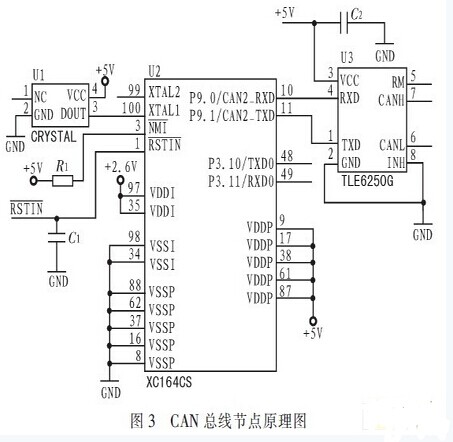 ЎЎЎЎБнНвЈ¬ЧЬПЯБ¬ЅУК±БЅ¶ЛёчјУТ»Ц»120 ¦ёµДµзЧиЈ¬ЛьГЗ¶ФУЪЖҐЕдЧЬПЯЧиї№ЖрЧЕПаµ±ЦШТЄµДЧчУГЈ¬їЙјхЙЩРЕєЕ·ґЙдёЙИЕЎЈ ЎЎЎЎ2.3 CANЧЬПЯЅЪµгИнјюЙијЖ ЎЎЎЎCANЧЬПЯЅЪµгИнјюЙијЖУлХыёцПµНіµДКµК±РФєНїЙїїРФГЬЗРБЄПµЎЈ±ѕПµНіЦРёчІї·ЦјдµДКэѕЭЅ»»»±ИЅПЖµ·±Ј¬CANЧЬПЯЙПґ«КдµДКэѕЭЦЎ°ьАЁУРЈє1)Цч»ъ·ўЛНµДїШЦЖЦёБоЦЎЈ¬Цч»ъїШЦЖЧЕХыёцПµНіµД№¤ЧчДЈКЅЈ¬НЁ№эPCB°еОЄєГ°е»т»µ°еµДРЕєЕАґїШЦЖ·Цјр1єН·Цјр2µДФЛЧч;2)ёчїШЦЖІї·Цґ«ёшЦч»ъµДЧґМ¬РЕПўЈ¬Ѕ«ХэФЪЙП°еЦРЎўХэФЪіц°еЦР»тХЯПµНі№КХПµИПыПўґ«ёшЦч»ъЈ¬·Ѕ±гІЩЧчИЛФ±КµК±БЛЅЗХыёцПµНіРЕПў;3)ёчїШЦЖІї·ЦЦ®јдµДРЕПўЅ»»»Ј¬ИзЙП°еІї·ЦјмІвµЅТ»ЕъPCB°ејмІвНкіЙЈ¬НЁЦЄ·ЦјрІї·Ціц°еµДРЕєЕЈ¬ИОєОІї·ЦјмІвµЅ№КХПНЁЦЄ±ЁѕЇРЕєЕµИЎЈ ЎЎЎЎёщѕЭПµНіµДКµјКЗйїцОґ±аРґПаУ¦µДИнјюіМРтЎЈХвАпК№УГµДXCl64CSµҐЖ¬»ъµДCANїШЦЖЖчЧсСCAN V2.0B№ж·¶ЎЈ±ЁОД»єґжµҐФЄЧо¶а±Јґж32ёц±ЁОД¶ФПуЈ¬Гїёц¶ФПуµДЧоґуКэѕЭі¤¶ИОЄ8ЧЦЅЪЎЈГїёц±ЁОД¶ФПуУРТ»ёц±кК¶·ыєНЧФјєµДїШЦЖєНЧґМ¬О»јЇЎЈНЁ№эїШЦЖПаУ¦јДґжЖчАґґж·ЕНЁРЕК±·ўіц»тХЯЅУКХµЅµДКэѕЭТФј°±ЁОДјДґжЖчЧйµДЙиЦГЎЈ¶Ф±ЁОДјДґжЖчЅшРРіхКј»ЇЦ®єуЈ¬±ЁОД»єґжµҐФЄОЮРиCPUјаїШѕНДЬ№»ґ¦АнКэѕЭµДЅУКХєН·ўЛНЈ¬јт»ЇБЛИнјюґъВлµД±аРґЎЈ¶шCPUНЁ№э·ГОКCANїШЦЖЖчЧґМ¬јДґжЖч»тХЯУЙCANїШЦЖЖчТФЦР¶ПµД·ЅКЅНЁЦЄCPUЈ¬јґїЙµГµЅµ±З°НЁРЕЧґМ¬Ј¬ґУ¶шЅЪКЎБЛCPUµДХјУГК±јдЎЈ ЎЎЎЎ2.3.1 CANїШЦЖЖчµДіхКј»Ї ЎЎЎЎТЄКµПЦCANНЁРЕЈ¬КЧПИТЄ¶ФCANїШЦЖЖчЅшРРХэИ·іхКј»ЇЙиЦГЎЈіхКј»ЇЦчТЄНкіЙПВГжµД№¤ЧчЈєЅЪµгїШЦЖјДґжЖчACP/BCRµДЙи¶Ё;CCEєН INITЦГО»;ґнОујЖКэЖчЧоґуЦµµДЙи¶Ё;ЅЪµгКдіц№ЬЅЕµДЙи¶Ё;ЅЪµгґ«КдЛЩВКµДЙи¶Ё;ёшЅЪµгЕдЦГ·ўЛНЎўЅУКХПыПўМеЎЈ¶ФУЪXCl64CSЈ¬CANїШЦЖЖчµДіхКј»ЇїЙТФК№УГDAVEЅшРРЕдЦГЈ¬АґЧФ¶ЇЙъіЙґъВлЈ¬ТІїЙТФУГ»§ЧФРР±аРґЎЈіхКј»ЇБчіМИзНј4ЛщКѕЎЈ ЎЎЎЎ 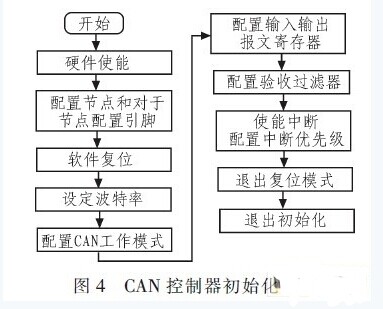 ЎЎЎЎТФПВОЄПаУ¦µДіМРтґъВлЈє ЎЎЎЎ 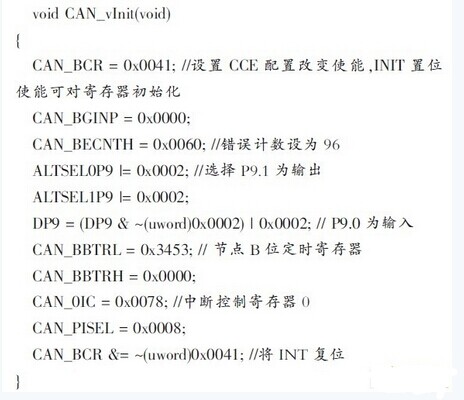 ЎЎЎЎ2.3.2 CANїШЦЖЖчµД·ўЛНєНЅУКХіМРт ЎЎЎЎCANДЈїйіхКј»ЇіЙ№¦єуЈ¬ѕНїЙТФУГЖдАґґ«ЛН±ЁОДЎЈЅЪµгПтЧЬПЯЙП·ўЛН±ЁОДµД№эіМКЗЈєЅ«ґэ·ўЛНµДКэѕЭґт°ьіЙ·ыєПCANРТйµДЦЎёсКЅЈ¬РґИл·ўЛН»єіеЗшЈ¬ІўЧФ¶Ї·ўЛНЎЈКэѕЭЦЎТ»ЦЎЧо¶аЦ»ДЬґ«Кд8ёцЧЦЅЪЈ¬ґуУЪ8ёцЧЦЅЪµД°ґХХГї8ёцЧЦЅЪОЄТ»ЦЎґ«ЛНЈ¬КЈПВІ»Чг8ёцЧЦЅЪµДІ№іЙ8ёцЧЦЅЪЎЈїЙТФФЪіМРтЦРЦ±ЅУµчУГ CAN_vTransmitєЇКэјґїЙКµПЦ·ўЛНКэѕЭЈ¬ёГєЇКэ¶ЁТеИзПВЈє ЎЎЎЎ 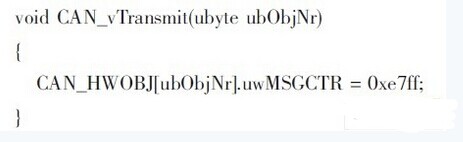 ЎЎЎЎЅУКХКэѕЭУРІйСЇ·ЅКЅ»тЦР¶П·ЅКЅЎЈХвАпІЙУГЦР¶П·ЅКЅЈ¬ТЄКµПЦµД№¦ДЬКЗЈєЅшИлЦР¶ПЅУКХіМРтЈ¬ЕР¶ПЦР¶ПКЗ·сКЗЅУКЬЦР¶П;ИфКЗЅ«КэѕЭ¶Біц»єґжЖчІўЅшРРЕР¶ПЈ¬ФЩЅшИлПаУ¦µДГьБоєНКэѕЭґ¦АнєЇКэЎЈїШЦЖЖчЅУКХєН·ўЛНБчіМИзНј5ЛщКѕЎЈ ЎЎЎЎ 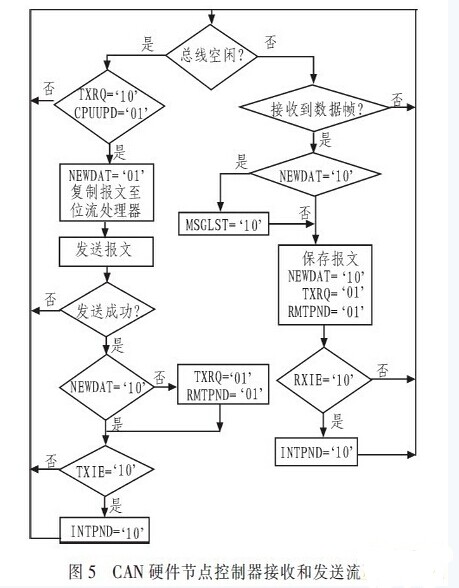 ЎЎЎЎ3 ЅбКшУп ЎЎЎЎёГЧФ¶Ї№вС§јмІвНЁРЕПµНіТСѕКµПЦЗТНЁ№эБЛБЄµчЈ¬КэѕЭґ«ЛНОИ¶ЁЈ¬ІўТСУ¦УГУЪPCB°еГжИ±ПЭЧФ¶Ї№вС§јмІвТЗµДїШЦЖПµНіЎЈёГЧФ¶Ї№вС§јмІвНЁРЕПµНіВъЧгїЙїїРФєНБй»оРФµДёЯТЄЗуЈ¬КµПЦїШЦЖПµНіёчµҐФЄПа¶Ф¶АБўЈ¬ёчµҐФЄЦ®јдµДБ¬ПЯјтЅаЈ¬К№ПµНіІЩЧчјтµҐЈ¬К№УГїЙїїЈ¬ИЎµГБЛБјєГµДК№УГР§№ыЎЈ |
НшУСЖАВЫ